Общие сведения о якорно-швартовных механизмах. Чтобы обеспечить надежную стоянку на якоре, у причалов и других плавучих и береговых сооружений, суда оборудуют якорными и швартовными механизмами. Они должны развивать необходимые тяговое усилие и скорость подтягивания швартовного каната, обеспечивать быструю 230 отдачу якоря, отрыв якоря от грунта, его подъем и уборку в клюз. Якорно-швартовные операции на судах выполняются, как правило, с помощью одного механизма, снабженного звездочкой для якорной цепи и швартовным барабаном для швартовов (стальных, пеньковых, капроновых и других канатов). Механизмы, выполняющие такие операции, подразделяют на шпили и брашпили. Первые имеют вертикальную ось вращения тяговых органов, вторые — горизонтальную. У шпиля одна звездочка и один швартовный барабан (если шпиль звездочки не имеет, его называют швартовным); у брашпиля обычно две звездочки и два швартовных барабана. В носовой части судна (при двух носовых якорях) монтируют брашпили. Исключение составляют суда катамаранного типа, у которых в носовой части каждого корпуса установлены шпили. Кормовые якорно-швартовные устройства оборудуют, как правило, шпилями. На буксирах-толкачах для выполнения якорно-швартов-ных операций иногда используют буксирные лебедки. Малые суда имеют обычно один носовой якорно-швартовный шпиль. Шпили и брашпили, входящие в состав якорных и швартовных устройств, подразделяют на малые (с цепями калибром до 28 мм и тяговым усилием до 15 кН), средние (с цепями калибром 29—46 мм и тяговым усилием 16—50 кН) и крупные (с цепями калибром более 46 мм и тяговым усилием более 50 кН). По роду используемой энергии якорно-швартовные механизмы могут быть ручными, электрическими и гидравлическими. Ручные шпили и брашпили применяют в основном на несамоходных судах с якорями массой до 400 кг и с якорными цепями калибром до 19 мм. Наиболее распространенным приводом якорнно-швартов-ных механизмов является электрический, небольшая часть судов эксплуатируется с паровыми шпилями и брашпилями, в последнее время внедряется и гидравлический привод. На валу электродвигателей якорно-швартовных механизмов устанавливают тормоз, способный удерживать их тяговые органы от поворота под нагрузкой, превышающей на 50% номинальную. Мощность шпилей (брашпилей) по правилам Речного Регистра РСФСР должна быть достаточной для подтягивания судна к якорю, отрыва и подъема якоря со скоростью не менее 0,12 м/с при номинальном тяговом усилии на звездочке и обеспечивать выбирание каната при номинальном тяговом усилии с установленной скоростью (не более 0,3 м/с). Кроме того, с помощью привода должно создаваться усилие на швартовном барабане не менее двукратного номинального в течение 15 с.
Устройство шпилей. Большинство судов снабжают двумя становыми якорями в носовой части и стоп-анкером (меньшим по массе якорем) в кормовой части. Поэтому в носовой части судна устанавливают, как правило, брашпиль с двумя звездочками и швартовными барабанами, а в кормовой части — якорно-швартовный шпиль. На малых судах ограничиваются установкой одного носового якорно-швартовного шпиля. Механизм шпиля обычно разделяют на две части: верхнюю, состоящую из швартовного барабана со звездочкой, и нижнюю, включающую электродвигатель и редуктор. По расположению привода шпили подразделяют на двухпалубные и однопалубные. У двухпалубных шпилей электродвигатель и редуктор расположены на палубе, находящейся ниже той, на которой расположен швартовный барабан. Электрические однопалубные шпили могут иметь надпалубное или подпалубное расположение электродвигателя. Чаще устанавливают однопалубные шпили с электродвигателем над палубой и червячным редуктором. При подпалубном расположении электродвигателя обслуживание привода производят через вырез в палубе или через люки фундамента шпиля, снабженные водонепроницаемыми крышками.
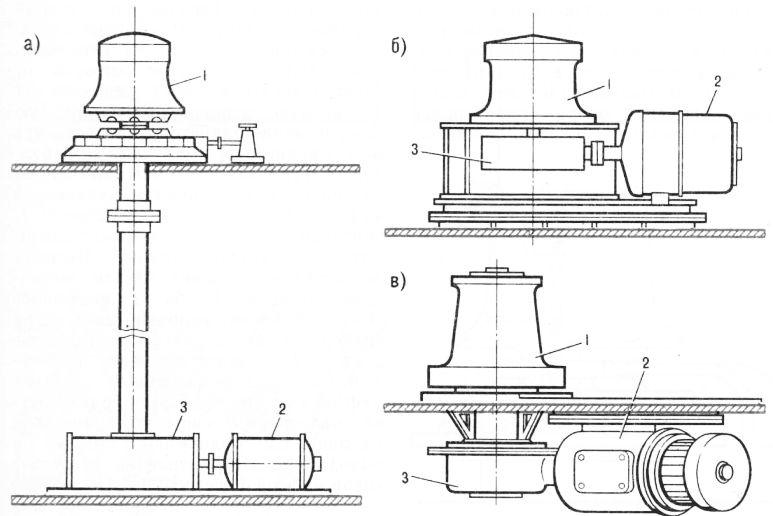
Рис. 1. Схемы расположения шпилей
В настоящее время в качестве ручных широкое распространение получили судовые шпили с рукояточным приводом семи типоразмеров (ШР1 — LLIP7), с номинальными тяговыми усилиями на турачке (барабане) до 7 кН и на звездочке до 6,5 кН. Это следующие шпили: ШР1 и ШР2 — швартовные с барабаном без звездочки; ШРЗ— ШР5 — якорно-швартовные с барабаном и звездочкой, отлитыми заодно целое; ШР6—ШР7 — якорно-швартовные, оборудованные колодочным тормозом с отлитыми раздельно барабаном и якорной звездочкой. Швартовный барабан, отлитый заодно целое со звездочкой, у ручных шпилей может вращаться на втулках вокруг оси баллера, жестко закрепленного в фундаментной раме. В головке (верхней части) шпиля на двух опорах смонтирован горизонтальный вал, проходящий через специальное отверстие в баллере. На концах горизонтального вала закреплены конические шестерни и съемные рукоятки. Вращение горизонтального вала передается ведомой шестерне, соединенной с верхней торцовой поверхностью швартовного барабана. К нижней части звездочки на пальцах шарнирно прикреплены собачки, перемещающиеся при вращении барабана по соответствующим храповым выступам, сделанным в фундаментной раме. Как только вращение рукояток прекратится, собачки, упираясь в выступы на раме, стопорят барабан от обратного вращения. С изменением направления вращения рукояток собачки перебрасываются в другую сторону.
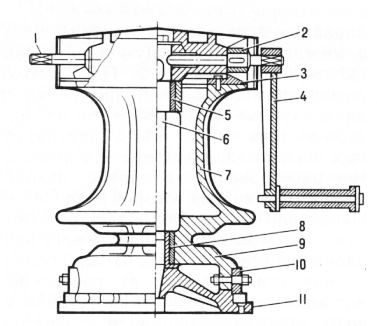
Рис. 2. Ручной якорно-швартовный шпиль ШР4
Электрические якорно-швартовные шпили выполняют с запасным ручным приводом, если они предназначены для работы с якорными цепями калибром до 28 мм (в морских условиях) и до 34 мм (в речных условиях). В последнее время в связи с возрастанием мощности судов якорно-швартовные механизмы выполняют, как правило, без запасного привода. Один из таких шпилей показан на рис. 170. Турачки (швартовный барабан) и якорная звездочка шпиля посажены свободно на неподвижную втулку, внутри которой от электродвигателя через редуктор (червячную, червячно-цилиндрическую или червячно-планетарную передачу) может вращаться пустотелый вал (баллер). Турачка и звездочка выполнены раздельно и соединяются кулачковой муфтой с помощью маховика, винтовая пара которого может поднимать и опускать турачку. Якорная звездочка имеет шкив для ленточного тормоза. Скоба выполняет роль отбойника якорной цепи. При включении электродвигателя через редуктор получает вращение пустотелый баллер, соединенный зубчатой муфтой с турачкой. Для производства швартовных операций вращением маховика поднимают турачку и выводят ее из зацепления с кулачковой муфтой звездочки. Последняя при этом стопорится от вращения ленточным тормозом. Якорные операции производят при работающем электродвигателе и выключенном тормозе, когда турачка с помощью маховика опущена вниз до зацепления с кулачковой муфтой вездочки. Изменение направления вращения баллера обеспечивается путем реверса электродвигателя, а изменение частоты вращения посредством использования кулачкового контроллера.
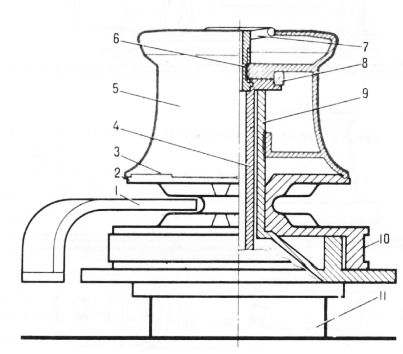
Рис. 3. Электрический шпиль
Устройство брашпилей. За последние годы конструкции брашпилей претерпели значительные изменения. Практически не выпускаются ручные брашпили с балансирным (кулачковым) и рукояточным приводами. В связи с возрастанием мощности судов электрические брашпили выполняют, как правило, без запасного ручного привода.
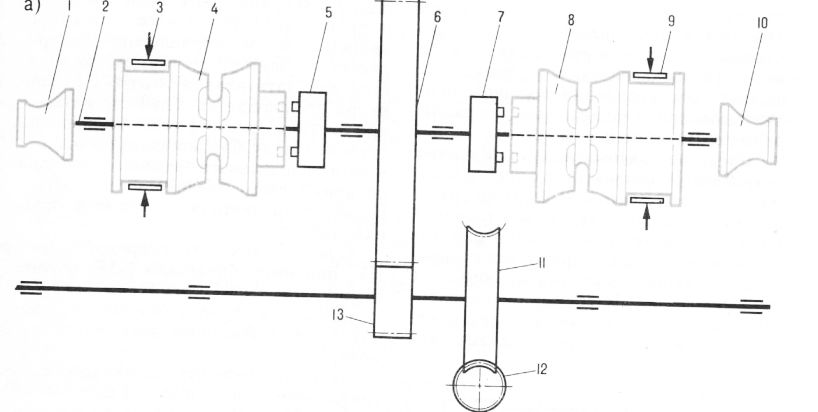
Рис. 4. Устройство электрического брашпиля
Брашпиль, схема которого показана на рис. 4, а, состоит из кулачкового контроллера для пуска и остановки электродвигателя, редуктора, передающего вращение якорным звездочкам и турачкам, рычагов и маховиков управления соответствующими муфтами и ленточными тормозными устройствами. При включении электропривода брашпиля через редуктор, состоящий из червячной и цилиндрической, силовых передач, получает вращение грузовой вал. На его концах жестко закреплены швартовные турачки. Цепные звездочки, отлитые заодно со шкивами ленточных тормозов, посажены на валу свободно. Ступицы звездочек имеют кулачки, входящие в зацепление с муфтами, насаженными на шлицы грузового вала. Швартовные операции производятся при застопоренных тормозах и выключенных муфтах. Якори поднимаются при включенной муфте или и выключенном ленточном тормозе на шкиве соответствующей звездочки. Одновременно разрешается поднимать два якоря только после поочередного отрыва их от грунта. В клюз якоря втягиваются отдельно. Для отдачи якоря ленточные тормоза и муфты выключаются. Звездочки под действием масс якоря и цепи при этом свободно вращаются на грузовом валу. Скорость движения якорной цепи регулируется ослаблением или натяжением тормозной ленты. Якорная цепь, сходящая со звездочки, хранится под палубой в цепном ящике, к которому она прикреплена жвака-галсом. Между брашпилем и якорным клюзом, в котором подвешивают якорь, установлен стопор, предназначенный для крепления якорной цепи при выполнении швартовных операций, ремонтных работ и т. п.
Средства автоматизации якорных устройств. В соответствии с требованиями Речного Регистра РСФСР на грузовых судах длиной более 60 м и толкачах предусматривается дистанционная отдача якорей с поста управления судном. Подъем якорей выполняют обычно с местного поста. На речных судах широкое применение получили электромеханические и электрогидравлические средства дистанционного управления (ДУ) якорными механизмами. В схему электромеханического ДУ включены два электродвигателя: один воздействует на стопор якорной цепи, другой — на ленточный тормоз звездочки. Обычно конструкцию стопора якорной цепи специально разрабатывают для условий дистанционной отдачи якоря. Для включения электрической схемы ДУ в работу переключатель режимов устанавливают в положение «Торможение и дистанционная отдача». При нажатии кнопки управления в этом случае включается электродвигатель ленточного тормоза. Лента начинает растормаживаться. Одновременно вступает в действие и электродвигатель отдачи стопора. К моменту отдачи стопора якорной цепи завершается и растормаживание ленты. Якорная цепь освобождается, и происходит отдача якоря. С отпусканием кнопки управления электродвигатель ленточного тормоза включается для затягивания ленты и отдача якоря прекращается. По мере натяжения ленты возрастает сопротивление на грузовом валу брашпиля, срабатывает муфта предельного момента, подача питания в схему прекращается и электродвигатель ленточного тормоза останавливается.
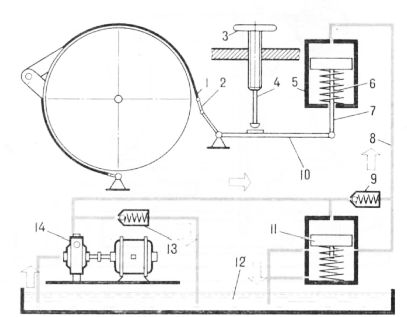
Рис. 5. Схема дистанционного управления брашпиля
С помощью электрогидравлического ДУ, например брашпиля БЗР, осуществляется:
— крепление одного из якорей по-походному с помощью ленточного тормоза;
— дистанционная отдача со свободным травлением и последующей остановкой травления якорной цепи на любом участке;
— местный контроль длины обеих якорных цепей, вытравленных за борт, и дистанционный контроль длины правой якорной цепи.
Затормаживание брашпиля осуществляется через тягу и рычаг с помощью пружины. Растормаживается ленточный тормоз при подаче масла в гидроцилиндр насосом или вручную путем вращения маховика с винтом. Подача масла к гидроцилиндру осуществляется при нажатии кнопки «Пуск» на пульте дистанционной отдачи якоря. При этом включается электроприводный лопастной насос и масло под давлением 3,5 МПа через обратный клапан поступает в верхнюю полость гидроцилиндра. Одновременно золотник смещается вниз, перекрывая сливной канал, сообщающий нагнетательную магистраль с масляным баком. Давление в верхней полости гидроцилиндра возрастает, и толкатель, сжимая пружину, поворачивает рычаг по часовой стрелке и растормаживает ленточный тормоз. Травление якорной цепи продолжается до тех пор, пока нажата кнопка «Пуск», при этом избыток масла из нагнетательной магистрали сбрасывается в масляный бак через перепускной клапан. При отпускании кнопки «Пуск» насос останавливается. Давление в магистрали 8 падает, золотник смещается вверх и открывает сливной канал, сообщающий верхнюю полость гидроцилиндра с масляным баком. Толкатель под действием пружины поворачивает рычаг против часовой стрелки и затягивает ленточный тормоз. Отдача якоря прекращается.
Момент отжатия кнопки «Пуск» контролируется визуально по механическому указателю длины вытравленной цепи, смонтированному на пульте дистанционной отдачи якоря. Механические указатели, выполненные в виде отдельных узлов, устанавливают в крышке редуктора брашпиля. При отдаче якоря цепь вращает звездочку. Последняя через прямозубую и червячную передачи поворачивает на согласующий угол лимб (диск) относительно неподвижной стрелки. На лимбе закреплена шкала, градуированная в метрах соответственно передаточному числу и расчетному диаметру звездочки. При подтягивании якорной цепи звездочка вращается в обратную сторону и устанавливает лимб со шкалой в нулевое положение. Указатель правой звездочки дополнительно оборудован электрическим преобразователем для дистанционного дублирования показаний указателя длины. Преобразователь (резистор R4) кинематически через предохранительную муфту соединен с лимбом и синхронно с ним вращается. Электрическая схема дистанционного указателя подключена к источнику постоянного тока напряжением 24 В. С изменением длины вытравленной цепи изменяется и сила тока. Силу тока определяют по миллиамперметру тА, шкала которого градуирована в метрах. При полностью вытравленной цепи сопротивление резистора R4 увеличивается до максимального и на шкале миллиамперметра тА появляется отметка «180 м». При минимальном сопротивлении измерительного преобразователя, когда якорная цепь выбрана, стрелка дистанционного указателя устанавливается в положение «0». Чтобы ограничить силу проходящего через прибор тока при минимальном сопротивлении резистора R4, последовательно с миллиамперметром тА в схему включен резистор R2. Для регулирования указателя увеличивают до максимального сопротивление измерительного преобразователя R4 и с помощью шунтирующего резистора R3 устанавливают стрелку миллиамперметра на максимальное деление шкалы (180 м). Схема считается отрегулированной, если показания электрического дистанционного указателя отличаются от показаний механического счетчика не более чем на ±5% при максимально вытравленной цепи.
Для повышения точности показаний миллиамперметра (независимо от колебаний питающего напряжения) на измерительный преобразователь подается стабилизированное напряжение от стабилитрона V2, равное 7,0—8,5 В. Последовательно с резистором R1, устанавливающим силу тока, проходящего через стабилитрон V2, включен диод VI, предохраняющий схему от повреждения в случае подключения питания с неправильной полярностью.
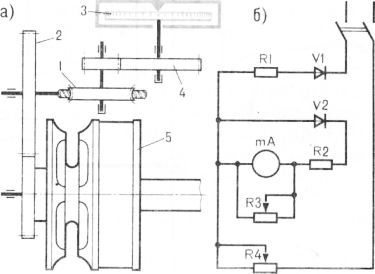
Рис. 6. Указатель длины вытравленной цепи
Автоматические швартовные лебедки. В последнее время большегрузные и крупные пассажирские суда оборудуют автоматическими швартовными лебедками. Швартовка судов с помощью таких лебедок осуществляется в режиме ручного управления, а на стоянке их переводят на автоматический режим работы. Швартовные лебедки при этом обеспечивают надежную стоянку судна на швартовых с постоянным натяжением каната. При снижении усилия (ослаблении каната) лебедка автоматически выбирает канат (наматывает его на барабан), а при натяжении швартовов сверх заданного усилия— травит канат (проворачивает барабан для удлинения швартова). С помощью автоматических швартовных лебедок устраняется ручной труд, необходимый для выбирания и травления швартовных канатов, а также сокращается время для выполнения таких операций. Автоматические швартовные лебедки выполняют с электрическими и гидравлическими приводами и устанавливают на палубе в удобном для производства швартовных операций месте. Пост управления лебедками может для удобства обслуживания располагаться и на некотором расстоянии от них. Автоматическую швартовную лебедку с электрическим приводом обычно оборудуют двухскоростным редуктором, который при включении электродвигателя приводит во вращение шестерню и пустотелый вал с шестерней планетарной передачи. Корончатая шестерня планетарной передачи жестко соединена с грузовым валом лебедки, а корпус — с тремя шестернями-саттелитами, заторможенными от вращения пружиной переключателя режимов работы. С грузовым валом жестко связана гурачка. Швартовный барабан соединяют с грузовым валом лебедки посредством муфты. При включенной муфте электродвигатель через редуктор, шестерню и корончатую шестерню передает крутящий момент на барабан лебедки. Причем усиление на швартовном канате через шестерни, воспринимается корпусом планетарной передачи. Последний удерживается от проворачивания пружиной переключателя режимов, и каждому усилию Р на швартовном канате соответствует определенное положение тарелки в цилиндре, т. е. соответствующее натяжение пружины. При ослаблении или натяжении швартовного каната равновесие нарушается. Например, с уменьшением усилия Р (ослабление каната) пружина воздействует на тарелку, поворачивает рычаг, связанный с командо-контроллером, вправо. Электродвигатель включается в режим выбирания каната. Наоборот, с увеличением натяжения каната (возрастанием усилия Р) пружина сжимается, рычаг поворачивается влево и электродвигатель включается на режим травления каната. Когда усилие в швартовном канате и натяжение пружины переключателя режимов работы лебедки достигнут заданного значения, рычаг выключит электродвигатель. В этом случае крутящий момент на швартовном барабане будет уравновешен моментом сопротивления на корпусе планетарной передачи лебедки.
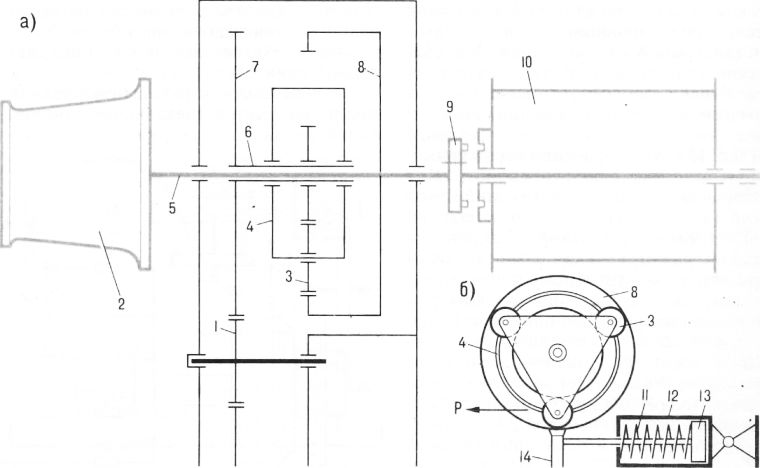
Рис. 7. Автоматическая швартовная лебедка
В схему гидравлических швартовных лебедок включены электроприводной аксиально-, или радиально-порш-невой насос и реверсивный гидродвигатель. Смонтированный на валу лебедки гидродвигатель по конструкции аналогичен насосу. Разница заключается в том, что при вращении вала насоса в ту или другую сторону в трубопроводах системы изменяется направление движения жидкости, а гидродвигатель, наоборот, с изменением направления движения жидкости в магистрали изменяет направление вращения барабана лебедки. Автоматический переключатель режимов в гидравлических лебедках управляет перепускным клапаном. С увеличением натяжения каната клапан перепускает все масло во всасывающий трубопровод и гидродвигатель работает в режиме насоса.
При ослаблении натяжения каната, наоборот, перепускной клапан закрывается, давление в нагнетательной полости гидродвигателя возрастает и швартовный барабан поворачивается в направлении подтягивания каната.
Правила обслуживания. В соответствии с Правилами технической эксплуатации якорно-швартовные механизмы должны: «страгиваться» из любого положения; обеспечивать плавное торможение якорных звездочек; не допускать самопроизвольной отдачи якоря и травление швартовов; развивать в течение с усилие в якорной цепи (швартовном канате) на 50% больше номинального.
Из-за особенностей эксплуатации якорно-швартовных механизмов (кратковременности и периодичности их действия, использования цепей и канатов) от судового экипажа требуется строгое соблюдение последовательности выполнения всех производственных операций и правил безопасности при пуске этих механизмов, обслуживание их во время действия, остановки и различных ремонтных работ.
При подготовке механизмов к пуску необходимо произвести их наружный осмотр; проверить, нет ли посторонних предметов на движущихся частях, и убедиться в надежности крепления сопряженных деталей; установить наличие масла в бачке насосного агрегата дистанционного привода отдачи якоря, в корпусе редуктора, подшипниках и других трущихся деталях; проверить опробованием исправность действия приводов ленточных тормозов и кулачковых муфт. Все якорно-швартовные операции выполняют только по команде вахтенного начальника и под его руководством.
Запрещается эксплуатация механизмов при уменьшении диаметра отдельных звеньев цепи на 20% (на судах смешанного плавания класса «М-СП» на 10%). Число разорванных проволок у остальных швартовных канатов не должно превышать 20% общего их количества на длине, равной шести диаметрам.
Перед выполнением якорно-швартовных операций следует опробовать механизмы «вхолостую» и, только установив их исправность, приступать к производству работ. Маховик контроллера переставляют в положение «Пуск» только после установки соответствующих органов управления (муфт, тормозов, палубных стопоров) в рабочее положение. Во время работы механизма необходимо периодически проверять температуру подшипников редуктора и корпуса электродвигателя, следить за наличием смазочного масла на трущихся поверхностях деталей, принимать все меры к тому, чтобы механизм работал плавно, без стука и ненормального шума.
При выполнении якорно-швартов-ных операций запрещается: разъединять муфты включения звездочек при вращении баллера или грузового вала; дотрагиваться руками до расторможенной якорной цепи или поправлять якорь при втягивании его в клюз; открывать крышки контроллера, находящегося под током; прикасаться к движущимся частям и стоять на линии движения якорной цепи или швартовного каната.
Чтобы обеспечить исправное техническое состояние механизмов, нужно периодически (1—2 раза в навигацию) производить их плановые ТО, во время которых проверяют крепление редуктора, электродвигателя, стоек и других деталей к фундаменту, вскрывают крышки смотровых окон редукторов и определяют состояние червячной и цилиндрической зубчатой пары, очищают трущиеся поверхности от загрязнения, песка и металлических опилок, устраняют все обнаруженные неисправности. При плановых осмотрах разрешается разбирать механизмы только в объеме, необходимом для выполнения операций технического обслуживания. Результаты осмотра якорно-швартовных механизмов фиксируют в вахтенном журнале.