Отечественный и зарубежный опыт ведения морских геологических исследований, а также значительный опыт выполнения подводных исследований для народно-хозяйственных целей, накопленный в ряде развития стран, показывает, что эффективное изучение и освоение ресурсов дна морей и океанов, а также комплексное исследование последних для различных целей, могут быть осуществлены только с помошью использования специальных средств подводных исследований и работ: подводных аппаратов, лабораторий, станций и т. п. В то же время как бы далеко не шагнула подводная техника, оснащенная современной автоматической и телемеханической аппаратурой, непосредственное участие человека в изучении морского дна является обязательным, важным и неоспоримым условием эффективного выполнения исследований морского дна и его практического освоения. Самый современный автоматизированный подводный аппарат или механизм, дистанционно управляемый манипулятор или робот не смогут полностью заменить под водой человека, обладающего свободой действия и маневра, способного непосредственно изучить и оценить подводную обстановку, на месте принять решение,. сделать вывод и проявить творческую инициативу.
В связи с этим одной из важных проблем в создании методов и технических средств изучения и освоения дна Мирового океана является разработка и внедрение индивидуального подводного снаряжения и оборудования.
Выше указывалось, что развитие средств индивидуального снаряжения и оборудования для подводных исследований берет свое начало с древнейших времен. Большинство древних подводных средств снаряжения и подводных приспособлений, разумеется, не представляют сейчас интереса с технической точки зрения, но они свидетельствуют о длительной эволюции развития этой области подводной техники, говорят о непрестанных усилиях человека в изучении и освоении богатств Мирового океана. Краткая история развития способов и средств, обеспечивающих индивидуальные подводные погружения и исследования, приведена в работе М. Н. Диомидова и А. Н. Дмитриева, а рис. 32 схематически иллюстрирует этапы развития индивидуальных и групповых средств погружения.
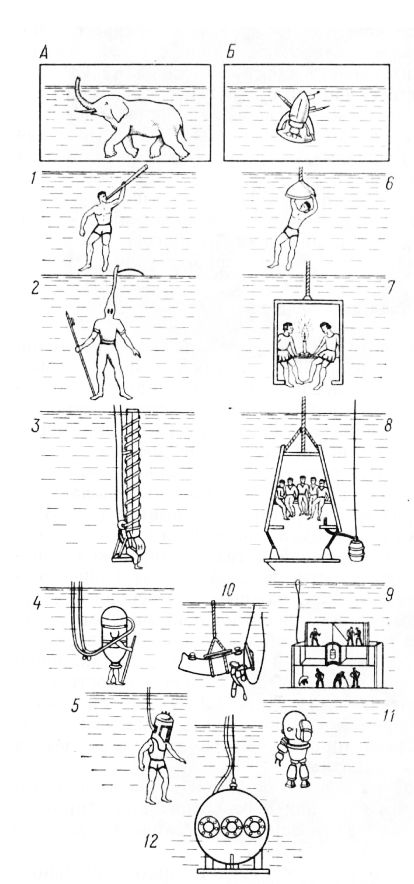
Рис. 1. Этапы развития средств погружения:
А — слон благодаря хоботу, поднятому над водой, может дышать, находясь под водой. Этот способ дыхания лег в основу водолазного снаряжения типа скафандра. 1 — водолаз дышит через тростниковую трубочку; 2 — водолаз в кожаном водолазном шлеме; 3 — подводная машина с шахтой для подачи воздуха; 4 — водолазный аппарат Клингерта; 5 — прообраз мягкого скафандра. Б — водяной жук, захватывающий при нырянии запас воздуха для дыхания, — прообраз водолазного колокола. 6 — водолаз с перевернутым колпаком; 7 — первый спуск в водолазном колоколе; 8 — «катание» в колоколе; 9 — использование колокола для подводных работ; 10— машина Лесбриджа; И— жесткий скафандр; 12— батисфера Биби
Индивидуальное оборудование и снаряжение
При решении теоретических и практических вопросов в этой области подводных исследований и при создании соответствующих образцов техники встают сложные аспекты физиологического, психологического, технического и технологического порядка.
В частности, здесь должны учитываться:
— глубинное давление, вызывающее опасные нарушения психофизиологических функций в организме человека;
— низкая температура морской воды, вызывающая переохлаждение организма;
— вечный мрак в глубинных зонах моря, лишающий человека визуально ориентироваться и работать под водой;
— наличие опасных для человека морских существ.
Прогресс в глубоководных погружениях человека в усовершенствованном индивидуальном снаряжении в последние десятилетия позволил ему чувствовать себя свободнее и увереннее, но при этом существенно не увеличились ни глубина погружения, ни сроки пребывания человека под водой. Это заставило специалистов серьезно заняться проблемой обеспечения продолжительного пребывания человека на дне моря. Для этого с 1959 г. в США выполнялась пятилетняя программа «Генезис», проводившаяся в несколько этапов с использованием первоначально животных, затем человека.
Физиологические эксперименты, осуществленные по программе «Генезис», показали, что длительная выдержка в условиях высокого давления при дыхании искусственными смесями (на основе гелия) безвредна для человеческого организма. Этим была доказана полная реальность осуществления программы «Человек в море», т. е. идеи продолжительного пребывания человека под водой для выполнения определенной работы.
С 1962 г. вопросами, связанными с физиологией длительных погружений и созданием новой подводной техники, стал заниматься известный американский исследователь Э. Линк. Несколько позднее работы по обеспечению продолжительного пребывания человека под водой велись в Институте океанографии в Монако под руководством Ж- Кусто путем выполнения ряда последовательных программ, известных под шифром «Коншелф » («Преконтинент»). Результаты исследований по этим программам значительно продвинули вперед мировой опыт подводных исследований и работ.
Для создания нормальных условий жизнедеятельности и ра-ооты на морском дне в настоящее время решаются проблемы преодоления вредного действия на человека глубинного давления, устранения переохлаждения его тела, защиты от нападения морских существ, обеспечения подводными средствами связи и ориентации под водой, и, наконец, оснащения подводными транспортными средствами и мощными источниками освещения.
Средства преодоления вредного действия глубинного давления
Вредное действие глубинного давления на организм акванавта (водолаза) может быть устранено путем замены сжатого атмосферного воздуха, используемого для дыхания, специальной дыхательной газовой смесью. Эти смеси создаются на базе гелия, являющегося инертным газом, растворимость которого в организме человека более чем в 4 раза ниже азота. В настоящее время применяют дыхательные смеси, состоящие из гелия, водорода и кислорода; гелия, азота и кислорода; гелия и сжатого атмосферного воздуха и др. Эти смеси позволили перейти через 100-м глубинный барьер.
В опытах, проведенных во Франции по программе «Кон-шелф», и в США по программе «Силаб», использовались смеси самых различных пропорций. Практикой было установлено, что на глубине 240—300 м гелий оказывает наркотическое действие. На глубине 300 м возникает глубинный барьер, для преодоления которого потребовался новый состав дыхательной смеси и его дозировка. Швейцарский математик Г. Келлер разработал специальную смесь, используя которую он благополучно погрузился на глубину 300 м и пробыл там в течение нескольких минут. Г. Келлер считает, что во время погружения и пребывания акванавта под водой дыхательная смесь должна меняться по строгому графику в соответствии с рассчитанным заранее графиком изменения давления. Отдавая должное успеху Г. Келлера, Э. Линк высказал убеждение, что гелио-кислородные смеси вполне пригодны для погружения на 300 м и более при условии, что будет обеспечена необходимая декомпрессия.
Крупные достижения Э. Линка в области техники и методики подводных погружений и работ явились основой для организации фирмы «Оушен системз», в задачу которой входит создание новых средств погружения и дальнейшее совершенствование методики использования эффекта насыщения для обеспечения подводных работ на глубине до 300 м.
Ж- Кусто предполагает использовать водородно-кислород-ную дыхательную смесь для погружения на глубину 500 и 1000 м (проект программы «Коншелф» — VI и VII).
Другой проблемой, решение которой должно обеспечить минимальное влияние глубины погружения, является проблема создания автономного индивидуального подводного дыхательного аппарата. Современные разработки в этом направлении представляют собой существенное совершенствование ранее известных подводных дыхательных аппаратов и их составных утементов, в частности: дыхательных масок и шлемов, закрывающих лицо гидронавта, с вмонтированными в них элементами подводного телефона; система клапанов, автоматически регулирующих состав и количество газовой смеси; баллонов, раздельно содержащих компоненты дыхательной смеси, и т. д.
В СССР в настоящее время распространены легкие костюмы и акваланги типа «Подводник-1», «Украина», «Садко», которые позволяют находиться под водой на глубине до 40 м не более 50 мин.
В последние годы в США и Франции разрабатываются принципиально новые подводные дыхательные аппараты, способные использовать для дыхания кислород, растворенный в морской воде. В 1967 г. в США появились два изобретения, предусматривающие дыхательные аппараты с искусственными жабрами, которые представляют собой мембраны из специальной пленки, сквозь которые кислород и углекислый газ могут быстро диффундировать.
В 1970 г. в США создана новая система для обеспечения дыхания под водой. Фирмы «Дженерал электрик» и «Биомарин индастриз» испытали эту систему на глубинах до 300 м.
Установлено, что с помощью вновь созданной дыхательной системы тренированный водолаз может работать на глубине 300 м до 6 ч. Аппарат надежно работает при неблагоприятных условиях и его можно применять в исследовательских целях, при аварийно-спасательных работах и т. д.
В целом состояние вопроса создания эффективной системы дыхания акванавта (водолаза) под водой показывает, что существующие в настоящее время подводные дыхательные аппараты пока еще не совершенны, не полностью надежны и не имеют принципиальных отличий от аналогичных аппаратов, созданных более 20 лет тому назад.
Современные экспериментальные погружения и соответствующие медицинские исследования свидетельствуют о том, что человек еще не достиг физических границ, погрузившись на 520 м. Практически можно ожидать, что с усовершенствованием систем жизнеобеспечения, конструкций подводных камер, инструментов и методов континентальный шельф и верхняя „асть континентального склона станут доступными для изучения водолазами в недалеком будущем.
Эксперименты, проводимые в США и Франции с животными, показывают, что максимальный практический предел рабочего погружения находится между 300 и 760 м. Однако существуют физиологические барьеры, которые необходимо будет преодолеть для обеспечения эффективности подводных работ.
Средства устранения переохлаждения тела
Эти технические средства создают необходимые условия для благоприятного теплового режима, обеспечивающего телу акванавта постоянство температуры при условии когда теплоотдача поверхности тела будет соответствовать теплообразованию организма в конкретных условиях окружающей водной среды.
Создание защитного костюма является сложной задачей, так как костюм должен обладать большой прочностью, быть водонепроницаемым, удобным и обеспечивать не только благоприятный тепловой режим, но и свободу движений при выполнении работ на различных глубинах и в разных условиях.
Защитные костюмы разрабатываются на одном общем принципе — заполнении пространства между внутренней и внешней оболочкой костюма теплой дыхательной смесыо.
В 1967 г. Э. Линк предложил защитный костюм, обеспечивающий погружение на глубину до 120 м. Он изготовлен из водонепроницаемой резины, имеющей сообщающиеся капилляры, по которым подается подогретая дыхательная смесь. Головной шлем, соединенный с костюмом, изготовлен из мягкого неопре-на. Смесь нагревается электрическими подогревателями. В этом же году в Англии был предложен подводный костюм, обеспечивающий погружение на глубину до 122 м, который изготовлен из водонепроницаемого материала, состоящего из двух слоев, промежуток между которыми заполнен специальным веществом, содержащим каналы, по которым поступает теплая дыхательная смесь, подогреваемая электричеством. Утепленные защитные костюмы открывают большие возможности для исследования морского дна не только на глубинах до 120 м, но и в прибрежной зоне Арктических морских районов. В США этот метод получил название «Скуба Дайвинг».
Опыт водолазных работ на нефтепромыслах в Мексиканском заливе показывает, что одной из важнейших практических проблем является создание легких водолазных шлемов, обеспечивающих надежное погружение на глубину до 90 м, имеющих малую массу, оборудованных устройством связи и т. п. Было также установлено, что водолазы предпочитают работать в вентилируемом снаряжении, а не в шланговом легководолазном, так как первое снаряжение имеет малое сопротивление дыханию даже при выполнении тяжелой работы на больших (до 90 м) глубинах.
Средства индивидуальной подводной связи и ориентирования
Безотказное, эффективное и быстрое общение гидронавтов и водолазов между собой, выполняющих на Дне ту или иную работу или научный эксперимент, а также иадеЖ-ная связь с обеспечивающими их средствами имеют громадное практическое и моральное значение. Не меньшее значение имеет и надежная ориентация в морской воде.
Исключительную важность и необходимость надежного и эффективного технического решения этой проблемы трудно переоценить. В различных странах в этом направлении проводятся большие исследования, и в первую очередь в области гидроакустики и звуковой подводной связи. В России гидроакустические исследования проводились в самом начале XX в. на Опытовом бассейне (в Петербурге), центром же технической мысли в области звуковой подводной техники в России являлся Балтийский завод. В этот период были разработаны подводная звуковая сирена, установка для подводного телеграфирования («гидрофоническая станция»), станция звуко-нодводиой связи (испытания в районе Севастополя в 1908 г.) и т. д.
Все существующие в настоящее время средства индивидуальной подводной связи представляют собой подводные телефоны двухстороннего действия, использующие один физический принцип — передачу через водную среду речи гидронавта, преобразованной в гидроакустические колебания звуковой частоты, а также прием этих колебаний из водной среды и преобразования их в речь, воспринимаемую гидронавтом. Схема подводного телефона состоит из передающего и приемного блоков. Первый включает в себя микрофон, полоснопропускающий фильтр, усилитель мощности и гидрофон. Второй состоит из усилителя, фильтра, демодулятора и головного телефона.
Конструктивно системы индивидуальной подводной связи могут быть оформлены в виде трех типов телефонов:
— в первом элементы смонтированы в специальном контейнере, который может находиться в общем блоке с баллонами, содержащими дыхательную смесь, и частично в дыхательной маске;
— во втором все основные элементы подводного телефона смонтированы в специальном головном шлеме;
— в третьем основные узлы телефона смонтированы в дыхательной маске и частично в защитном костюме.
Использование подводных индивидуальных средств связи (телефонов), действующих на принципе передачи и приема гидроакустических колебаний через водную среду, весьма затруднено явлениями, возникающими в ней.
К таким явлениям относятся:
— естественные (собственные) шумы и звуки моря, создающие сильные помехи и наложения на гидроакустические колебания звуковой частоты;
— сильное искажение речи гидронавта, находящегося в маске с дыхательной газовой смесью; особенно сильно искажайся речь при использовании смеси на основе гелия;
— ограничение восприятия речи гидронавта, находящегося в дыхательной маске под давлением;
— затруднение приема звуковых колебаний вследствие шума, производимого самим дыхательным аппаратом.
Другие физические принципы, кроме принципа гидроакустики, которые бы могли быть использованы для подводной индивидуальной связи, применяющиеся, например, в атмосфере и космосе, в условиях водной среды малоприменимы.
Разработка средств и способов индивидуальной подводной ориентации — важная часть общей проблемы подводной навигации.
Основными задачами подводной навигации являются:
— создание способов и средств точного, надежного и быстрого ориентирования гидронавтов под водой;
— разработка навигационного оборудования для ориентирования гидронавтов и подводных аппаратов;
— разработка и установка на дне морей базовых навигационных станций, где возможны подводные исследования и работы;
— составление подводных навигационных карт современного рельефа дна.
Сложная задача разработки точных технических средств и способов подводной навигации на различных глубинах акваторий в необходимой мере не решена. Существующие технические средства подводной ориентировки предусматривают решение этой задачи путем определения направления на источник звуковых колебаний с использованием гидроакустических систем и устройств, действующих на бинауральном (стереофоническом) эффекте. К числу гидроакустических электронных систем относятся гидролокаторы, позволяющие производить поиск подводных предметов и определять их координаты активным методом — излучением акустической энергии в виде импульсов. Гидролокаторы делятся на два типа: шагового обзора и кругового обзора. Детальное рассмотрение .гидролокационных устройств дается в специальной работе. В настоящее время в подводных работах аквалангисты-любители используют портативные гидролокаторы массой 4,5 кг, обеспечивающие на глубине до 200 м дальность действия до 180 м. При выполнении глубоководных экспериментов (по программе «Силаб-П») применяли более громоздкие гидролокаторы, например, фирмы «Дальмо-Виктор», масса которых 10 кг; их обслуживают два человека, направление на объект определяется по громкости звука в наушниках.
Средства защиты от нападения рыб
При строительстве в 1964 г. подводного испытательного полигона у Багамских островов (монтаж лаборатории «Силаб-I») американская фирма понесла большие финансовые убытки из-за непредвиденных трудностей при монтаже конструкций на морском дне вследствие проникновения воды в аппаратуру, коррозии металлических конструкций и нападения хищных рыб. Нападения последних отмечались и при исследованиях Ж- Кусто в Красном море.
Практически до сих пор нет эффективных средств защиты от нападения хищных рыб, в особенности от акул, работа в этом направлении находится на начальной стадии своего решения. Запатентованные средства отпугивания рыб (красящими и пахучими порошками) не эффективны, акустические и электронно-механические способы отпугивания практически еще не внедрены.
Подводные транспортные средства
Разработанные или разрабатываемые в настоящее время конструкции индивидуальных подводных транспортных средств могут быть разделены:
а) по принципу использования — на носимые гидронавтами на спине и на транспортирующие гидронавта на себе или внутри себя;
б) по принципу двигателей — на электрические и пневматические установки.
В настоящее время наиболее распространены так называемые средства-носители, оснащенные электродвигателями. Подводный носитель «Пегасус», например, который использовался в программе подводных исследований «Силаб-П», разработан па базе подводной киноторпеды «Пегасус» (фирмы «Реби-кофф»). Этот аппарат представляет собой герметичный корпус типа торпеды, внутри которого расположена аккумуляторная батарея, обеспечивающая питанием электродвигатель мощностью 1,5 л. с. Емкости аккумуляторов достаточно на 2 ч подводного плавания со скоростью 3,5 узла.
Кроме средств-носителей, существуют подводные средства транспортировки гидронавтов «внутри себя» («сухого» типа) или «мокрых» подводных аппаратов (типа подводных ло-Д°к). Последние предусматривают поступление воды в лодку, поэтому гидронавты должны иметь автономное водолазное снаряжение. К числу этих средств относятся и любительские аппараты-носители, созданные, например, в Московском авиационном институте («Ланка»),
Ранцузская фирма «Комекс» создала подводную лодку окрого» типа «Тоталь саб-01» для перевозки 5 человек, оборудования и инструмента к месту подводных работ на расстояние до 40 км со скоростью до 4 узлов.
Фирмой «Лорал электронике» (США) разработана двухместная «мокрая» подводная транспортная лодка «Фаэтон», которая успешно прошла испытания по программе «Силаб-Ц»“ Эта лодка имеет форму бомбы, а мощный двигатель обеспечивает ей скорость подводного движения до 8 узлов.
Рис. 2. Подводная транспортная лодка «Скубасаб-300»
Более совершенной «мокрой» подводной транспортной лодкой является аппарат «Скубасаб-300», в задачу которого входит как транспортировка двух гидронавтов, так и доставка рабочего инструмента и оборудования на место подводных работ или исследований. Масса этого аппарата 1000 кг, глубина погружения 90 м, он снабжен носовыми рулями, стабилизаторами и полусферическим прозрачным козырьком.
Подводная фото-кино-телевизионная техника
Визуализация подводных геологических объектов производится посредством применения оптических средств, основными из которых являются фото-кино- и телевизионная техника. В общем случае-при использовании указанных средств свет проходит последовательную цепь: источник освещения, среда, объект изучения — среда приемник. Источник освещения может быть естественным и искусственным; средой служат вода или воздух — вода; приемник обязательно включает объектив или систему иллюминатор — воздух — объектив и собственно приемник. Типом приемника может быть кинофотопленка в аппарате, трубка телекамеры или глаз человека-В составе фотоприемника могут быть полосовые и поляризаванные фильтры и усилители яркости изображения на электронно-оптических преобразователях.
Оптическими средствами можно управлять вручную, дистанционно, автоматически (по заданной программе) и от контактных или безконтактных датчиков.
В целом дальность съемки и ее качество определяются мощностью и направленностью источника, размерами и контрастностью объекта изучения и оптическими свойствами среды и приемника. Если прозрачность воды позволяет провопить подводную съемку без контейнера, в котором располагается фотоприемник, при использовании искусственной подсветки объекта могут быть три варианта: разнесение светильника и приемника, применение поляризаторов и стробирование света по дальности. В практике обычной подводной фотографии возможности использования направленных источников освещения и приемников, разрабатываемых в США, будут ограничены ввиду необходимости применения широкоугольных объективов. С целью резкого качественного улучшения подсветки в 60-х годах стали применять лазеры. Для технических целей, как показывает практика, использование лазеров в цветной съемке не оправдывает себя, так как резко повышается сложность аппаратуры и требования к оператору. При разработке и применении подводной фотоаппаратуры основное внимание уделяется устранению аберраций оптической системы, в остальном практически пет принципиального отличия от систем, применяемых на суше. Некоторые конструктивные изменения могут быть осуществлены в части увеличения продолжительности времени съемки без перезарядки под водой (увеличение емкости кассет, тонкая подложка фотопленки и т. п.) и автоматизации наводки на резкость, смены кадров и др. Для защиты от давления и притока воды камеры помещают в прочный бокс с плоскопараллельным (или корригирующим) иллюминатором. В специальной работе, посвященной обзору современных средств подводной съемки, приведены технические характеристики распространенных фото-киноаппаратов для применения в подводных исследованиях.
Основное назначение систем подводного телевидения, как показывает отечественный и зарубежный опыт подводных исследований, сводится к роли телевизионного «видоискателя» для наиболее эффективного использования скоростной покадровой съемочной аппаратуры (включаемой по команде оператора), или для ориентирования какого-либо подводного автоматического устройства (манипулятора) при выполнении определенных операций, например для сбора образцов осадков и горных пород на морском дне.
Общие требования к оптике телевизионных систем практически такие же, как у фотосистем: большая светосила объектива, минимальные аберрации, высокое разрешение и др.
В состав современных подводных телесистем входят: передаю, щая телекамера с кабельным видеоусилителем, источником освещения и контрольным монитором; кабель; надводная видеоконтрольная установка; устройство для магнитной видеозаписи или фото-, киносъемки с экрана монитора. Основная проблема в подводной телесъемке — обеспечение надежного и емкого канала связи с надводным пультом. Ведутся исследования в области разработки подводных телесистем с бескабельной связью за счет использования светового луча (луча лазера). Некоторые современные зарубежные системы подводной теле-съемки описываются в работе Е. П. Калмыковой и др.
В нашей стране успехи в области подводной фото- и телесъемки геологических объектов достигнуты в Институте океанологии АН СССР и Лаборатории аэрометодов МГ СССР. ИО АН СССР разработал образец глубоководного устройства, названного «Подводный геолог» (типа автономного манипулятора) для сбора донных образцов пород. Этот аппарат состоит из специальной телевизионной установки, системы телемеханики и двух манипуляторов. Все узлы аппарата размещены на несущей раме. Длина аппарата 2,6 м, ширина 2 м, высота 0,8 м, масса в воде 200 кг, глубина погружения расчетная 4000 м (по кабелю 3200 м).
С 1969 г. успешно эксплуатируется телеуправляемое устройство «Краб», предназначенное для сбора донных образцов пород до глубин 2000 м и визуального изучения дна. Длина устройства 1,9 м, ширина 1,2 м, высота 1,4 м, масса 600 кг. «Краб» состоит из трубчатой рамы, на которой расположены два бокса с телекамерой и системой управления (диаметром по 0,5 м), два аккумуляторных бокса, система гидропривода, манипулятор и контейнер для образцов. ИО АН СССР разработал также телеуправляемый по кабелю плавающий аппарат «Манта», несущий две телекамеры. Глубина работы аппарата до 150 м. Необходимость жесткой фиксации положения передающей камеры (во избежание получения смазанной картины на экране приемного устройства) нередко сводила на-нет ряд преимуществ этого аппарата подводного телевидения.
Данные Лаборатории аэрометодов МГ СССР свидетельствуют о том, что подводное фотографирование и телесъемка являются важным методом изучения прибрежья морского дна континентального шельфа; который может обеспечить изучение по снимкам современных фаций, обнаженных геологических структур, форм рельефа дна, особенностей распространения подводных растений и т. д. Для подводных съемок в прибрежной зоне в определенных условиях (при использовании специальных боксов) можно применять обычные фотоаппараты типа «ФЭД», «Зоркий», «Зенит», «Старт» и другие, а также подводные фотоавтоматы (типа ПФА-6), стереофотокамерЫ и т. д.
За рубежом телевизионная аппаратура широко применяется а„я обследования оснований морских буровых установок, под-водных трубопроводов, кабелей, осмотра причалов, корпусов судов и т. д. В связи с этим важное значение приобретают замкнутые телевизионные системы, обеспечивающие возможность осмотра п необходимого ремонта в подводных условиях, позволяющие специалистам, находящимся на судне, руководить действиями водолазов, определять характер повреждений и фиксировать их при помощи видеозаписи для последующего анализа.
Фирма «Гидро продактс» (США) в результате 12-летних опытно-конструкторских работ разработала замкнутые подводные телевизионные системы, включающие малогабаритные и обычные телевизионные камеры и осветительное устройство; чувствительность этой аппаратуры (камера типа 1С-125) в 2000 раз больше обычной.
Фирма «Дженерал видео» (США) выпускает подводные автономные телевизионные камеры для работы на глубине до 180 м. Все блоки аппаратуры заключены в алюминиевый корпус, телекамера позволяет наблюдать и регистрировать подводное изображение. Фирмы «Едо вестерн» и «Каху электронике» (Япония) выпускают малогабаритные телевизионные системы, рассчитанные на глубины до 6,5 км. Фирма «Белл братерз» (США) разрабатывает бескабельные телевизионные системы с передачей медленно развертывающихся изображений по гидроакустическому каналу с глубин до 5000 м. Этой фирмой создана на ЭВМ математическая модель телевизионной системы, в которой учитываются параметры воды, освещения и телевизионной аппаратуры. В настоящее время разработано восемь моделей систем для различных целей и условий, способных работать на глубинах до 6 км.
Фирма «Перри» – (США) создала подводную установку «Ре-кон-П», оснащенную современной автоматизированной системой подводного телевидения и манипулятором, способную проводить исследования морского дна до глубины 950 м.
Подводные дома-лаборатории
На первом этапе создания и внедрения подводных домов-лабораторий основной задачей являлось обеспечение места и условий для длительного пребывания человека под водой с целью изучения физиологических, психологических, технологических и иных аспектов. В последние годы Ж. Кусто, а также ведущие американские специалисты (Э. Венк) приходят к выводу, что подводные дома-лаборатории будут необходимой и неотъемлемой частью комплекса подводных устройств, обеспечивающих научные исследования, изучение и практическое освоение минеральных ресурсов морского дна.
Подводный дом-лаборатория может быть местом отдыха и жилья для водолазов, выполняющих монтаж, ремонт и эксплуатацию подводных буровых агрегатов и иных установок. Очевидно, наиболее целесообразным является сочетание подводных лабораторий с подводными автономными аппаратами. Все это в принципе не исключает дальнейшего развития и применения подводных роботов и манипуляторов.
Первые эксперименты, связанные с длительным пребыванием гидронавтов под водой в подводных домах-лабораториях, были осуществлены в 1962 г. Э. Л инком и Ж- Кусто.
В настоящее время практически все подводные дома-лаборатории обеспечивают выполнение преимущественно комплексных научных исследований с целью получения специальной информации о морском дне, отработки наиболее целесообразных вариантов конструктивного решения подводных домов, изучения и внедрения вспомогательной аппаратуры и оборудования для подводных исследований, имитации работ в космическом пространстве и т. д.
В 1966 г. Ленгидрометинститут создал подводную лабораторию «Садко-1», представляющую собой стальной шар диаметром 3 м с прикрепленной к нему в нижней части металлической рамой для размещения аварийных баллонов со сжатым воздухом и для постановки шара на дно. Лабораторию обслуживали два гидронавта, глубина погружения составляла 12,5 м. В 1967 г. была построена и испытана вторая модель подводной лаборатории «Садко-2» в виде двухсферной конструкции, обе сферы которой имеют диаметр по 3 м. Они соединены между собой по вертикали цилиндрической вставкой, имеющей прочную переборку с герметичным люком диаметром 0,7 м. В верхней сфере оборудовано помещение для постоянного пребывания двух гидронавтов, в нижней — вспомогательное помещение. В 1967 г. гидронавты провели в п,одводной лаборатории шесть дней на глубине 25 м.
В 1968—1969 гг. была создана подводная лаборатория «Садко-3» вертикального типа, рассчитанная на экипаж из трех человек. Лаборатория имеет три этажа. В 1969 г. на Черном море были проведены испытания на глубине 24 м, работа проводилась в течение двух недель, акванавты погружались на глубину до 40 м. С помощью этой лаборатории решались комплексные задачи для различных целей.
В 1968 г. Институт океанологии АН СССР изготовил подводный дом-лабораторию «Черномор», в котором четыре человека на глубине 14 м проводили биологические и иные эксперименты (выяснение возможности выполнения гидронавтами на морском дне простейших работ).
Рис. 3. Подводная лаборатория «Садко-2»
Институт «Гипрорыбфлот» МРХ СССР разработал проект подводной лаборатории «Бентос-300» (размером 21Х2,0Х XI 1,2 м), которая даст возможность выполнять комплексные исследования морского дна на глубине до 300 м экипажем в составе 10 человек.
В Англии изготовление подводных домов находится на начальной стадии. В 1965 г. был осуществлен эксперимент, когда подводный дом «Глаукус» был установлен на глубине м> где два гидронавта жили и выполняли простейшие иследования в течение 7 дней. В дальнейшем предполагается осуществить эксперимент «Крокен», в ходе которого гидронавты должны спуститься на глубину 27 м.
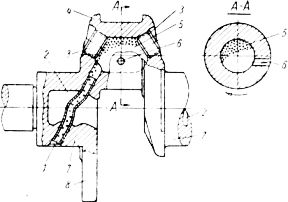
Рис. 4. Подводная лаборатория «.Черномор»
В 1966 г. кубинские и чехословацкие специалисты провели совместный эксперимент недалеко от Гаваны: подводный дом «Карибе-I» (стальной цилиндр длиной 3,5 м, диаметром 2,5 м) с двумя аквалангистами был установлен на глубине 15 м (в 3 м от дна). В процессе опыта изучались физиологические явления, производились фото- и киносъемка.
Чехословакия с 1965 г. выполнила ряд экспериментов по изучению возможности длительного пребывания человека на глубине, для чего были построены подводные дома «Пер-мон-И» и «Пермон-III», причем эксперимент показал, что последний дом может быть успешно установлен на глубине до 30 м.
Больших достижений в разработке, строительстве и эксплуатации подводных домов-лабораторий достигли французские ученые под руководством Ж. Кусто. Программы исследований Ж. Кусто под названием «Коншелф I, II, III» («Преконти-нент I, II, III») подробно описаны во многих статьях и книгах. Ниже кратко изложена суть этих экспериментов.
Вся программа «Коншелф I, II, III» выполнялась с 1962 по 1965 г.
Первый этап («Коншелф I») выполнялся в 1962 г. в Мар-сельской бухте с помощью подводного дома-цилиндра «Диоген» (длина 5 м, диаметр 2,4 м, глубина погружения 10,5 м), целью его было изучение физиологических процессов.
Второй этап («Коншелф II») выполнялся в 1963 г. недалеко от Порт-Судана (Красное море). Для эксперимента были изготовлены два подводных сооружения — основной жилой дом в виде «морской звезды», где пять гидронавтов на глубине 11 м прожили 1 мес, и второй — в виде цилиндра, где два гидронавта на глубине 25 м прожили в течение недели.
Задачи этого эксперимента:
а) подтверждение и экстраполяция результатов опыта с «Диогеном»;
б) выявление в реальных условиях возможностей материально-технического обслуживания подводных работ;
в) практическое проведение подводных работ и использование разнообразной подводной техники.
Третий этап («Коншелф III») проводился в Средиземном море (недалеко от Монако). Подводный дом-лаборатория был установлен на глубине 100 м, в котором шесть гидронавтов жили и работали в течение 23 сут.
Исключительный интерес представляет эксперимент «Коншелф III». В его задачу входило выполнение не только научных исследований, но и элементов геологоразведочных ра; бот: отбор проб донных осадков, монтаж подводной буровой установки, опытное обслуживание и эксплуатация подводной нефтяной скважины (нефтяной фонтан имитировался сжатым воздухом). Гидронавты жили в подводном доме, изготовленном в виде стальной сферы (диаметром 5,5 м), которая была закреплена на жестком основании (14,4×7,4 м), имеющем четыре опоры для установки на дно. В состав научной аппаратуры этого дома-лаборатории входили, в частности, две электронно-вычислительные машины, которые были связаны с вычислительным центром на берегу. Эксперимент «Коншелф III» прошел успешно. В последующие годы французские специалисты намечают выполнить серию экспериментов: «Преконти-нент IV» (глубина 300 м), «Преконтинент V» (200 м), «Пре-континент VI» (500 м) и «Преконтинент VII» (1000 м).
Опытно-конструкторские и научно-исследовательские работы по созданию подводных домов-лабораторий с 1964 г. выполняются ВМФ США по программе «Человек и море». В 1964 г у Бермудских островов был поставлен эксперимент «Силаб-1» («Подводная лаборатория I»), в соответствии с программой которого в подводном доме-цилиндре (длина 10 м, диаметр 3 м) на глубине 58,5 м в течение 10 сут жили четыре гидронавта. В задачу опыта входило решение ряда физиологических, психологических и технических вопросов. В 1965 г. проводился второй этап общей программы «Силаб» — «Силаб-П», основной целью которого являлось определение способности человека к работе в самых неблагоприятных условиях. Три группы гидронавтов по 10 человек каждая прожили в подводном доме по 15 сут на глубине 61 м, причем гидронавт С. Карпентер (бывший космонавт) и врач Соннеберг оставались под водой в течение 29 сут. Подводный дом «Силаб-П» представлял собой цилиндрический корпус длиной 17,4 м, диаметром 3,66 м, который разделен на четыре отсека: входной, лабораторный, хозяйственный и жилой. В процессе выполнения работ гидронавты погружались на глубину до 80 м, при этом в подводном ориентировании гидронавтам оказывал помощь дельфин Таффи.
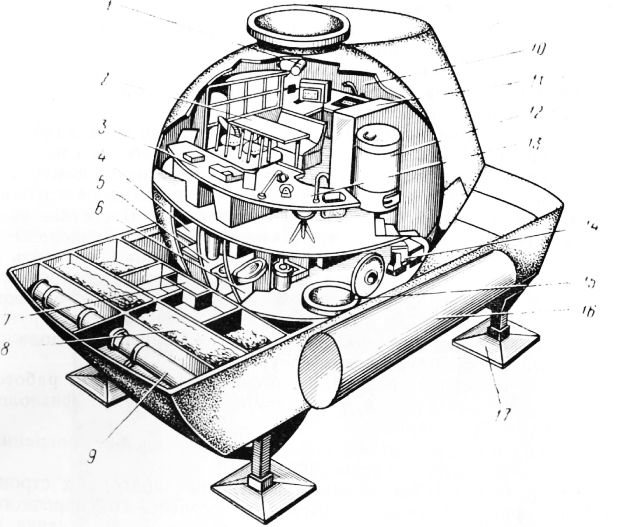
Рис. 5. Схема подводной лаборатории «Преконтинент III»:
1 — передающая телевизионная камера; 2 — кают-компания; 3— пульт управления; 4 – помещение; 5 — туалет; 6 — умывальник; 7 — балластная система; 8 — постоянный твердый балласт; 9 – баллоны ВИД; 10- камбуз; 11 – холодильник; 12 – кондиционер, U — лабораторный стол; 14 — компрессор; 15 — входной люк; 16 — твердый балласт; 17 — опорные площадки
Успешное проведение опытов по программам «Силаб-1» и «Силаб-П» послужило основанием перейти к осуществлению более сложной программы «Силаб-1 II», выполнение которой было назначено на 1968 г.
Состав экипажа «Силаб-Ш» должен был иметь квалификацию водолаза I класса. Более того, было разработано положение о присвоении звания «гидронавта». Согласно проекту эта подводная лаборатория должна быть установлена на глубине около 200 м вблизи Сан-Диего (Калифорния). В составе экипажа планировалось пять групп специалистов (водолазы и ученые) по 8 человек в каждой, которые должны были жить и работать под водой в течение 12 дней. Снабжение электроэнергией и пресной водой осуществлялось с берега посредством обеспечивающего судна «Элк Ривер».
Каждая из пяти групп, руководителем которых был назначен С. Карпентер, должна была выполнять конкретную задачу:
— задача первой группы: подготовка «Силаб-Ш» к работе, проверка и наладка ее отдельных узлов, выполнение физиологических исследований;
— задача второй группы: отработка спасательных операций и проверка трех типов гидроскафандров;
— задача третьей группы: осуществление подводных строительных работ, а также испытание многоцелевого сборочного инструмента (сверление, резание, пилка, шлифовка, клепка и завинчивание болтов);
— задача четвертой группы: испытание подводных оптических и гидрофизических инструментов, в частности индивидуальных гидролокационных устройств (подводное ориентирование);
— задача пятой группы: выполнение подводных геологических, биологических и иных исследований, а также испытание новых спасательных и поисковых средств.
Всё должно было выполняться на дне гидрофизического полигона, оснащенного различными приборами по изучению приливных волн, солености и температуры воды, турбулентных явлений, природных течений и т. д. Большое значение придавалось постановке опытов по изучению психофизиологических явлений, взаимоотношениям между членами экипажа и обеспечивающей службой и др.
Работе по программе «Силаб-III» предшествовал длительный период обучения и тренажа членов экипажа в близких к реальным условиям. В процессе подготовки к эксперименту появились неполадки, связанные с технической неподготовленностью водолазного снаряжения и недостаточной его проверкой, грубыми нарушениями в обеспечении герметичности подводного дома, неоправданной спешкой организаторов эксперимента и т. д., вследствие чего к его выполнению приступили лишь в феврале 1969 г., на глубине 180 м.
В дальнейшем был проведен эксперимент с использованием подводного дома-лаборатории «Игер», являющейся самой глубоководной и вместительной в мире. Запас газов обеспечивает автономную работу ее в течение 20 сут. и самостоятельное всплытие с глубины 180 м. В апреле 1970 г. лаборатория с пятью гидронавтами на борту достигла глубины 177 м и пробыла на ней 39 ч.
Не менее обширным и интересным является эксперимент с помощью подводной лаборатории «Тектит-I», в осуществлении которого принимали участие ВМС и Геологическая служба США, Управление по аэронавтике и космосу, фирма «Дженерал Электрик» и др. Согласно программе исследований четыре ученых (два океанолога, геолог и биолог) на глубине до 20 м в течение 60 дней должны были провести широкий комплекс научных исследований (гидрографических, геологических, биологических, физиологических, психологических и др.) Эксперимент «Тектит-I» был осуществлен в 1969—1970 гг. на глубине 15 м в районе Виргинских островов Карибского моря. За 2 мес. работы под водой ученые-гидронавты пробыли за пределами лаборатории 434 ч, в результате чего были получены ценные материалы биологических, геологических и иных исследований, а также очень ценные данные по вопросам проведения комплексных подводных исследований. Весьма успешное выполнение этой программы было продолжено в апреле-ноябре 1970 г. экспериментом «Тектит-П», по своему размеру и задачам превосходящему предыдущий. В эксперименте «Тектит-П» приняло участие 48 гидронавтов — специалистов США, Франции и ФРГ, составивших десять экипажей, из которых одни был женский. Кроме научных вопросов, Управление по аэронавтике и космосу проверяло некоторые практические вопросы, связанные с выполнением космических исследований лабораторией «Скайлаб».
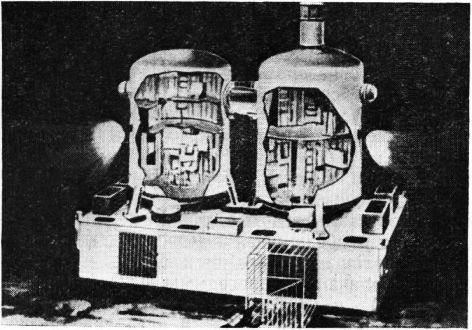
Рис. 6. Подводная лаборатория «Тектит-1»
Подводные аппараты
К этой категории подводных средств комплексных исследований морского дна относится многочисленная группа обитаемых и необитаемых подводных аппаратов (ПА) и исследовательских подводных лодок (ПЛ), которые в настоящее время особенно широко применяют в США, Франции, Японии и др. С помощью ПА и ПЛ практически на всех глубштах Мирового океана могут выполняться исследовательские и специальные работы по изучению и освоению его ресурсов.
В частности, эти технические средства в определенной степени могут выполнять или обеспечивать:
— разведку и разработку на морском дне месторождений нефти и газа, твердых полезных ископаемых и проводить подводную съемку;
— строительство, монтаж, обследование и ремонт народнохозяйственных, военных, научных и других подводных комплексов, в особенности нефтедобывающих подводных устройств;
— возведение и обслуживание морских ферм по выращиванию рыб, растительных организмов и т. д.
В США выполняются программы АТР («Андерси текно-лоджи програм») и ДОТ («Дип си текнолоджи програм»). целью которых является создание и внедрение разнообразных средств ведения глубоководных исследований, а также освоение новых материалов, источников энергии, систем дистанционного -правления и т. п. Руководители этих программ считают, что „ заработанные средства найдут широкое применение в изучении, освоении минеральных ресурсов морского дна, в особенности в разведке и добыче подводной нефти и газа. Возможность и эффективность использования обитаемых подводных аппаратов для научных исследований народнохозяйственного значения обсуждается в программе, подготовленной Национальной академией наук и Национальной инженерной академией США. В меньшем масштабе развитие подводных аппаратов отмечается во Франции, Японии, ФРГ, Канаде и Англии, где организация и выполнение соответствующих программ и планов осуществляются специальными управлениями, объединениями и комитетами. Возможности ПА и ПЛ в проведении комплексных морских исследований, в частности морской геологоразведки, более широки, чем средств надводных исследований.
По глубине погружения подводные аппараты разделяют на три типа:
— аппараты малых глубин с погружением до 300 м;
— аппараты средних глубин с погружением до 5000 м;
— аппараты больших глубин с погружением более 5000 м.
Ниже приводится описание некоторых из образцов подводных аппаратов, представляющих собой тот или иной тип или группу, которые могут быть использованы для геологических исследований морского дна в процессе выполнения специальных или комплексных подводных работ. Детально подводные аппараты рассматриваются в соответствующей литературе [5, 10, 38].
Наиболее простыми подводными аппаратами являются неавтономные буксируемые средства, которые в пределах прибрежья шельфа могут обеспечивать визуальные наблюдения, теле-, кино- и фотосъемку морского дна. К таким аппаратам относится батиплан «Атлант-I», масса которого 1840 кг, длина 4,5 м, глубина погружения 100 м.
В 1969 г. в США построен и испытан усовершенствованный образец буксируемого неавтономного аппарата «Гуппи», в котором гидронавт на глубине до 700 м может выполнять комплексные исследования в течение 48 ч. Он снабжен мощными источниками подводного освещения, манипулятором, необходимым исследовательским оборудованием.
Самым современным батипланом сейчас считается аппарат «Ьатфиш», предназначенный для выполнения комплексных исследований морского дна и морской среды на ходу буксируемого судна. Этот аппарат отличается хорошими маневренными качествами, масса его 70 кг, длина 1,2 м, ширина 7 м, высота 9 м. Он успешно используется на глубинах до 10 м.
В ряде стран в последние годы стали создавать легкие подводные аппараты, которые можно применять в мелководной зоне шельфа (глубина до 50 м) для различных целей и в пер. вую очередь для спортивных.
В настоящее время насчитывается более 30 подводных аппаратов с глубиной погружения до 300 м, обеспечивающих выполнение комплексных исследований в пределах континентального шельфа. К числу этих подводных аппаратов относится «Стар-I», «Кэбмэрин», «Сабморей», «Бентос-5», «Ашера», «Бивер», «Дениза», «Иомури», «Куро-Сио», «Шельф дайвер», «Нектон» и др. Важные геологические, археологические, океанологические и другие исследования выполняли аппараты «Стар-I», «Кэбмэрин», «Ашера», и в особенности «Дениза» (Ж. Кусто). Последний аппарат, получивший всемирную из-а вестность и признание, по существу стал самым эффективным и надежным средством обеспечения подводных исследований и работ в пределах глубин до 300 м. Он обеспечивал выполнение всех этапов программы «Преконтинент». Этот аппарат (рис. 39) имеет форму «блюдца», диаметр которого 2,85 м, высота 1,4 м. Дальность плавания до 8 км, скорость движения до 1,5 узлов, двигателями служат два водометных движителя. Кроме обычной аппаратуры для съемок, измерения глубин и освещения, «Дениза» снабжена гидрокомпасом, манипулятором, магнитофоном, радиоустановкой и спасательными средствами. Наиболее усовершенствованным является подводный аппарат СП-500 «Пус дэ мэр» («Морская блоха»), разработанный по проекту Ж. Кусто; в конце 1967 г. аппарат успешно прошел испытания. Он предназначен для выполнения научно-исследо* вательских работ и специальных кино-фотосъемок на глубинах до 500 м.
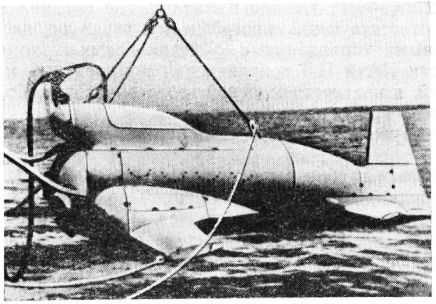
Рис. 7. Подводный неавтономный буксируемый аппарат «Атлант-1»
На основе результатов практического использования аппарата «Дениза» в 60-х годах в США было принято решение о строительстве серии подводных аппаратов этого типа для выполнения комплексных подводных работ и исследований: установки и наблюдения за научной аппаратурой на дне моря, изучение геологического строения дна, отбора образцов донных пород, спасательных операций, фото-киносъемки, испытания усовершенствованных приборов и отдельных узлов аппаратов на глубинах более 500 м. Эта серия глубоководных аппаратов была названа «Дипстар». В 1965 г. был построен первый образец «Дипстар» для исследования морского дна до глубины 1200 м. Аппарат имеет дискообразную форму, испытанную при эксплуатации «Денизы». Диаметр аппарата 1,83 м, состав экипажа 3 человека, дальность подводного плавания 35^км, скорость 3 узла. «Дипстар» оснащен кино- и телекамерой, радиостанцией, тремя эхолотами и другим оборудованием. Uh имеет механический манипулятор для взятия образцов грунта с радиусом захвата до 2 м и контейнер для их хранения.
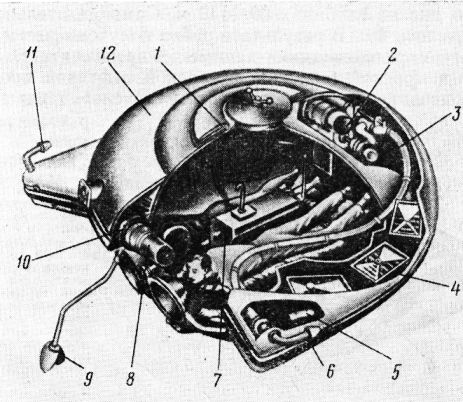
Рис. 8. Разрез подводного аппарата «Дениза»:
1 — панель управления; 2— бак для ртутного балласта; 3— насос; 4 — аккумуляторы; 5 — гидравлический поршень; 6, 11 — насадки водомера; 7 — бак для водяного балласта; 8 — бак для ртутного балласта; 9 — клешня; 10— внутренний стальной корпус; 12 — обтекатель из стекловолокна
В 1970 г. фирма «Хэмбл ойл энд рифайнинг» (США) использовала подводную лодку «Шелф дайвер» для геологических исследований в нефтеносном районе Мексиканского залива. 15 геологов в течение восьми дней проводили изучение морского дна на глубинах 60—140 м. Самое длительное погру. жение длилось 4 ч. В результате работ получены весьма ценные геолого-геоморфологические данные. Фирма считает, что применение в морской геологии и морской нефтяной промышленности подводных аппаратов и лодок безусловно перспективно.
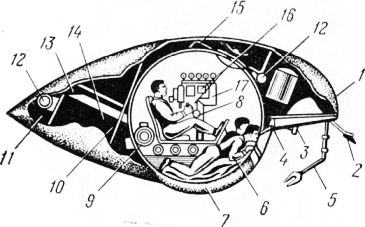
Рис. 9. Разрез подводного аппарата «Дипстар»:
1 — легкий корпус; 2 — светильник; 3 — телекамера; 4 — устройство для управления светильником; 5—манипулятор; 6 — наблюдатель; 7 — прочный корпус; S — ру. коятка управления; 9 — электроника гидравлической системы; 10 —- преобразователь; 11 — балласт; 12 — дифферентная система; 13 — проницаемая часть легкого корпуса; 14 — главная аккумуляторная батарея; 15 — надводный тубус; 16 — пульт управления с телеэкраном; 17 — пульт приборов
В этом же районе применяли двухместные подводные аппараты серии «Нектон» модификаций «альфа», «бета» и «гамма», глубина погружения которых до 305 м. Эти аппараты оборудованы гидрокомпасом, гидролокатором, буровым оборудованием, пробоотборниками и другими средствами, что позволяет выполнять широкий комплекс морских геологических исследований.
Фирмой «Инженер контор Любек» (ФРГ) разработано два типа подводных аппаратов многоцелевого назначения — «Тоурс-60» и «Тоурс-73», которые могут быть использованы в трех вариантах, соответственно для глубин 100, 200 и 300 м. В состав оборудования, кроме современной навигационной и специальной аппаратуры, входит механический и« гидравлический захват (черпак) для отбора проб донных грунтов. Перспективен для морской геологоразведки подводный аппарат «Шинкай» (Япония), предназначенный для геолого-геофизических исследований. С помощью разнообразного оборудования и приборов, в состав которых входят сейсмо-, грави- и радиометрическая аппаратура, а также манипулятор, можно получать информацию о геолого-геофизическом и геоморфологическом строении морского дна. Длина аппарата 15,3 м, высота 5,0 м, ширина 5,5 м, глубина погружения 600 м, максимальная скорость 3,5 узла, экипаж 4 человека, дальность плавания до 30 км.
В последние годы перед конструкторами стоит задача совершенствования подводных аппаратов в направлении повышения мореходных качеств в сложных гидрологических условиях и возможности их применения в Арктике. С этой целью фирма «Саб си ойл сервис» (Италия) разработала конструкцию подводного аппарата «Фоеникс-66», способного работать в штормо-вую погоду и подо льдом; рабочая глубина этого ПА до 365 м, дальность плавания до 700 км, автономность плавания до 7 сут, экипаж 7 человек.
Фирма «Перри сабмерсиблз» (Канада) создала аппарат «Навал» массой 4,5 т; при дальности действия до 25 км и скорости до 2 узлов он способен выполнять геолого-геофизические исследования в подледных условиях.
В СССР прошел испытания подводный аппарат «Север-2», который предназначен для выполнения рыбохозяйственных, океанографических, геологических и археологических исследований на глубинах до 2000 м .
Рис. 10. Подводный аппарат «Север-2»
Серию исследовательских глубоководных аппаратов в ближайшие годы намечено построить в США. Одним из важных проектов в осуществлении этой задачи следует считать проект создания подводных аппаратов под общим названием «ГЕММС ».
Планом строительства аппаратов типа «ГЕММС» намечается разработка трех модификаций:
— аппараты малых глубин (до 600 м) для изучения континентального шельфа;
— аппараты средних глубин (до 3000 м) для исследований континентального шельфа;
— аппараты максимальной глубины (до 5000 м) для изучения Мирового океана.
При разработке этого типа аппарата использованы новейшие достижения как в области подводной техники, так и в об-ласти строительства космических аппаратов. Так, аппарат «ГЕММС» (до 5000 м) состоит из четырех несущих цилиндров в которых расположены топливо, вспомогательное оборудовав ние, гелиевые баллоны и т. д. Кабина управления находится в стеклянном многограннике, в котором располагается 4 человека. Аппарат может свободно «парить» в толще воды, ложиться на дно и подниматься над ним, двигаться со скоростью более 3 узлов. Он оснащается разнообразным оборудованием: механическими манипуляторами для отбора проб донных пород, универсальным сонаром, магнитометром, гравиметром, эхолотом, четырьмя кино- и телекамерами, радиостанцией и т. д. Согласно проекту основная задача подводных аппаратов типа «ГЕММС» состоит в комплексном геолого-геофизическом исследовании дна всех зон морей и океанов.