Задачи автоматизации. Задача автоматизации системы кондиционирования воздуха состоит прежде всего в автоматическом поддержании в рабочих и жилых помещениях судна такого климата, который создавал бы у человека ощущение комфорта. Это приводит к понятию о зоне комфорта. В соответствии с работой, под этим понимают такое соотношение отдельных компонентов климата, которое обеспечивало бы уравновешенный тепловой баланс человека главным образом за счет отдачи тепла нормальной радиацией и конвекцией без участия особых регуляционных механизмов человеческого тела.
Для количественной оценки этой зоны комфорта приводятся, в частности, комбинированные диаграммы Лейсдена-Фреймарка, по которым можно определить, какие условия являются для человека приятными (зона I), приемлемыми (зона II) и неприятными (зона III), см. также. Из диаграмм видно, что наряду с другими параметрами решающее значение имеют температура и относительная влажность воздуха помещения, которые, следовательно,.надо использовать в качестве регулируемых величин системы кондиционирования воздуха. Как правило, точность поддержания этих величин составляет от ±2 до ±0,5 °С для температуры и от ±15-до ±5% для относительной влажности. Иногда достаточным считается только верхнее органичение влажности.
Поскольку субъективное ощущение климатических условий отдельными людьми колеблется в определенном диапазоне, а женщины и пожилые люди предпочитают иногда несколько более высокую температуру, необходимо ориентироваться на независимое кондиционирование воздуха в отдельных каютах с индивидуальной установкой заданных значений параметров этого процесса.
Однако не во всех случаях стремятся к поддержанию постоянной температуры: установлено, что, учитывая способность человека к адаптации, целесообразно при высоких наружных температурах несколько повышать температуру помещения, так, чтобы разница с наружной температурой не превышала от 3 до 7 °С. Этот режим работы называют скользящим кондиционированием воздуха.
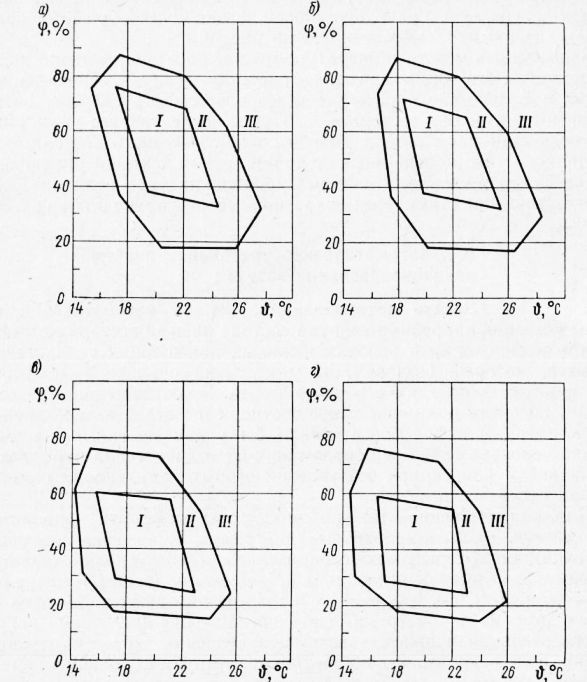
Рис. 1. Зоны комфорта по Лейсдену-Фреймарку
Если в кондиционируемых помещениях находятся значительные источники тепла, то при поддержании постоянного значения внутренней температуры возникала бы опасность вдувания слишком холодного воздуха, что привело бы к сквознякам. Из этих соображений необходимо дополнительно предусматривать ограничение минимальной температуры подводимого воздуха.
Кроме того, из соображений экономии расхода энергии стремятся к обеспечению требуемых состояний воздуха при минимальной тепло-или хладопроизводительности.
Определение управляемых величин. Выше было установлено, что наиболее важными параметрами (управляемыми величинами) системы кондиционирования воздуха являются температура и влажность воздуха. Теперь надо определить, в каком месте наиболее целесообразно фиксировать эти переменные. При этом следует заметить, что эти величины не во всех точках кондиционируемого помещения имеют одинаковые значения, а распределены в нем по определенному закону. Так как обычные датчики измеряют параметры только в одной точке, то правильному выбору места измерения придается особое значение. Возникающие при этом трудности вытекают из того, что профили температуры и влажности помещения на стадии проектирования, как правило, не известны и меняются с загруженностью помещения. Другие факторы обусловливаются стремлением избежать влияния стен и воздействия радиации и сквозняков, а также не в последнюю очередь соображениями архитектоники.
Оптимальное определение средних значений температуры и влажности помещения достигается при соответствующих измерениях в воз-духоотводящем канале. Однако с точки зрения динамики это наиболее неблагоприятный случай, так как здесь полностью проявляется аккумулирующее действие помещения.
С другой стороны, наиболее быстрое показание изменений достигается при расположении измерительных датчиков в воздухопод-водящем канале. Однако в этом случае не учитываются возмущающие воздействия помещения. Поэтому результаты этих измерений могут быть использованы только для динамической корректировки.
Методы управления. Ввиду того что суда эксплуатируются в очень большом внешнеклиматическом диапазоне, системы внутренней климатизации рассчитываются на реверсивный режим работы. В соответствии с этим они должны иметь устройства для обогрева и охлаждения, а также для увлажнения и осушения воздуха помещений.
Для нагревания и охлаждения, как правило, применяются раздельные теплопередающие устройства, работающие на различных теплоносителях. Поэтому они имеют собственные исполнительные органы, воздействующие на поток соответствующего теплоносителя.
Для взаимно противоположных процессов увлажнения и осушения воздуха также применяются разные методы управления. Увлажнение воздуха управляется обычно изменением количества воды или пара, вводимого в так называемую сопловую камеру. При осушении воздействие оказывают на поток охлаждающей среды, так как выделение влаги из воздуха можно изменять путем его охлаждения. С другой стороны, для того чтобы снова восстановить определенную температуру воздуха, при необходимости последовательно присоединяют воздухоподогреватель, который также имеет соответствующий исполнительный орган.
Кроме того, температура и влажность воздуха могут управляться в широких диапазонах путем соответствующего смешения наружного и обратного воздуха, причем этот принцип действия является очень экономичным. Для этой цели в различных вентиляционных каналах предусматриваются дополнительные исполнительные органы (жалюзийные заслонки), которые, однако, в большинстве случаев механически связываются между собой.
Подробные описания принципа действия различных методов управления частично с указанием характеристик по i, х-диаграмме приведены в специальной литературе, например.
Таким образом, особенностью систем кондиционирования воздуха с точки зрения управления является большое число исполнительных органов в сравнении с количеством управляемых величин. Так как при реверсировании нагрузки исполнительные органы перемещаются в большом диапазоне, то возникают особые требования к их регулировочным характеристикам. Это требует в свою очередь правильного выбора и расчета исполнительных органов, однако на практике именно это требование чаще всего нарушается.
Структура технологической системы. Схема типичной крупной установки кондиционирования воздуха показана на рис. 2. Из схемы видно, что нагнетающий вентилятор НВ подсасывает в определенном соотношении циркулирующий (тц) и свежий (тсв) воздух. Соответствующая обработка (подготовка) воздуха производится по ступеням в разных участках установки. Так, например, входящий смешанный воздух тсМ сперва нагревается в воздухоподогревателе ВП до необходимой для увлажнения температуры и затем в зависимости от режима работы увлажняется в сопловой камере СК или охлаждается, или осушается в воздухоохладителе ВО. При необходимости воздух подогревается в-дополнительном подогревателе ДП до необходимой для подводимого в помещение воздуха температуры. Подготовленный таким путем смешанный воздух подводится в. кондиционируемое помещение КП через воздухоподводящий канал ПК-
Использованный (отработавший) воздух снова отводится с помощью отсасывающего вентилятора ОВ, установленного в воздухоот-водящем канале ОК.. Часть отводимого воздуха возвращается в качестве обратного воздуха в систему циркуляции и смешивается в смесительной камере с наружным воздухом.
Передаточные функции объекта управления. Передаточная функция комплексного объекта управления температуры и влажности складывается в основном из функций доминирующих участков объекта «воздушный канал» и «помещение», а также различных участков установки для воздухоподготовки (подогреватель, охладитель, сопловая камера и дополнительный пбдогреватель).
Диаграмма потока сигналов крупной установки кондиционирования воздуха изображена на рис. 2. Выходными величинами этого комплексного объекта управления являются температура помещения и относительная влажность. В качестве входных величин действует вся совокупность имеющихся управляемых величин, а именно, относительный воздушный поток, тепловой поток воздухоподогревателя, поток впрыскиваемой среды, тепловой поток дополнительного подогревателя, а также различные возмущающие воздействия.
Среди возмущающих воздействий следует различать такие, которые попадают в объект кондиционирования воздуха вместе с подводимым воздухом и действуют на его расход, температуру и влажность. Аналогичным образом учитываются возмущающие воздействия на потоки нагревающей, охлаждающей и увлажняющей среды, которые в диаграмме потока сигналов не изображены. Из диаграммы видно, что эти помехи проходят в большинстве случаев через весь объект кондиционирования воздуха, однако их действие может своевременно обнаруживаться с помощью измерительных датчиков в воздухоподводящем канале.
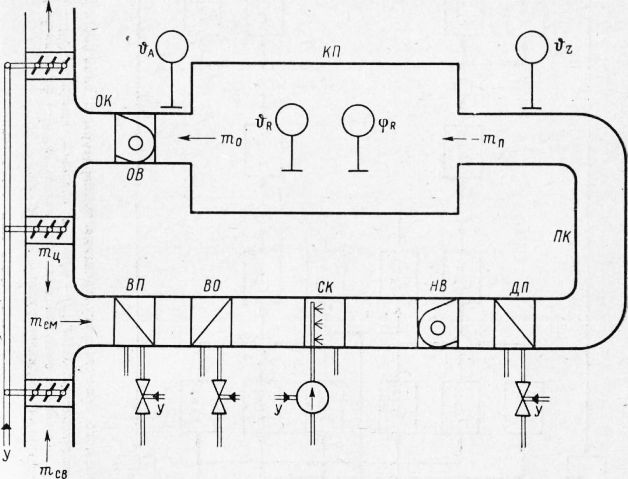
Рис. 2. Принципиальная схема системы кондиционирования воздуха.
Местом входа второй группы возмущающих воздействий является само кондиционируемое помещение. Сюда относятся переменные источники тепла и влажности (люди, освещение и т. д.) внутри помещения, а также меняющееся трансмиссионное тепло стенок вследствие изменений наружной температуры, солнечной радиации и воздействий ветра.
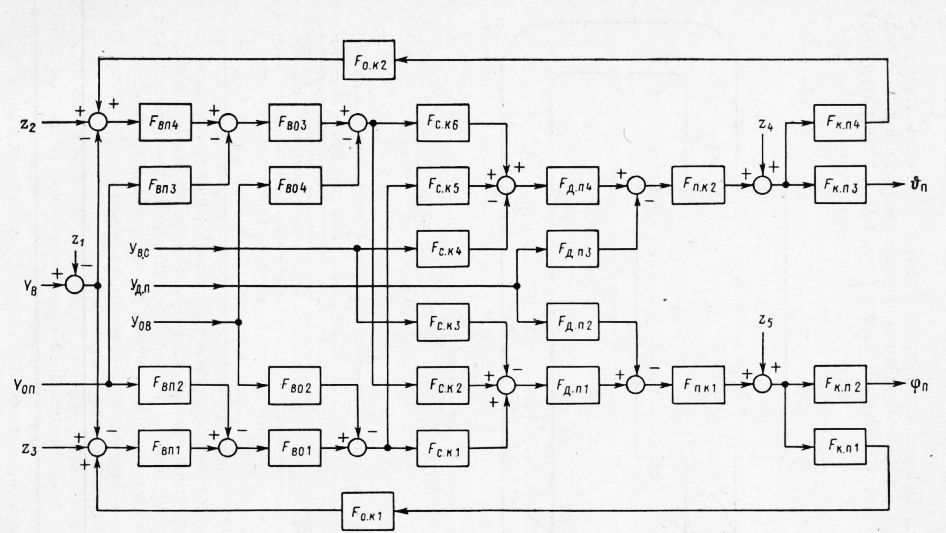
Рис. 3. Линеаризованная структура комбинированного объекта регулирования температуры и влажности помещения.
Приведенная диаграмма потока сигналов носит ярко выраженный характер управления несколькими величинами, причем отдельные переменные многократно взаимодействуют между собой через различные участки установки. При более глубоком анализе надо было бы также учитывать многочисленные нелинейности и изменение во времени различных параметров участков объекта управления. Последнее обусловливается зависимостью от нагрузки на установку (нагрузка помещения), аэродинамического и температурного профилей, параметров состояния наружного воздуха и др.
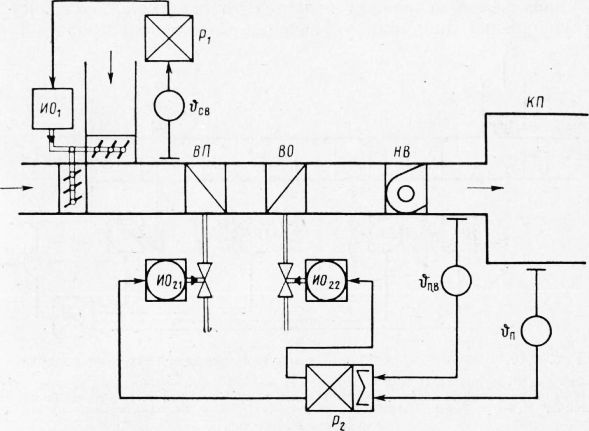
Рис. 4. Блок-схема регулирования нагревания и охлаждения воздуха.
Концепция управления системой кондиционирования воздуха. Существует множество возможных и уже практически осуществленных методов управления системами кондиционирования. Здесь можно привести лишь некоторые решения. Подробно методы управления и связанные с этим вопросы изложены в специальной литературе.
а) Управление нагреванием и охлаждением воздуха. В соответствии с изображенной на рис. 9.9 блок-схемой широко используется очень экономичный метод регулирования температуры смешанного воздуха путем воздействия на соотношение между количествами свежего и обратного воздуха с помощью регулятора Р1. Для обеспечения подачи определенной минимальной доли свежего воздуха необходимо ограничение, которое в большинстве случаев реализуется с помощью упора на исполнительном органе И01.
Показанный метод может применяться до тех пор, пока энтальпия обратного воздуха больше энтальпии наружного воздуха. Если это условие не выполняется, то установка начинает работать с минимальной долей свежего воздуха и для дальнейшего изменения состояния подаваемого в помещение воздуха необходимо оказывать воздействие на поток нагревающей или охлаждающей среды. Главной управляемой величиной является температура помещения Для улучшения динамики управления можно использовать в качестве вспомогательной управляемой величины температуру подводимого воздуха Фп.в. Кроме того, с помощью ограничительного элемента (не изображенного на рисунке) возможно ограничение температуры подводимого воздуха по нижнему пределу.
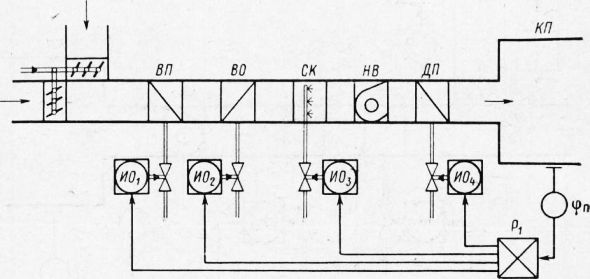
Рис. 5. Блок-схема регулирования увлажнения и осушения воздуха.
б) Регулирование увлажнения и осушения.
Если же влажность в помещении возрастет выше установленного значения, то с помощью исполнительного органа #02 открывается проток охлаждающей среды через поверхностный охладитель.
в) Регулирование точки росы и температуры помещения. Особенность установки кондиционирования воздуха с регулированием точки росы в соответствии с рис. 6 состоит в том, что воздух за сопловой камерой почти всегда полностью насыщен влагой. Вследствие этого температура р увлажненного воздуха приближенно равна температуре точки росы (управляемая величина). В некоторых случаях величина точки росы изменяется в зависимости от влажности помещения, чтобы при повышении влажности заданная величина температуры точки росы снижалась, и наоборот. Регулятор точки росы Р2 действует по необходимости либо на клапан подачи воды к распыляющим-соплам или на подогреватель (увлажнение), либо на клапан охладителя (осушение).
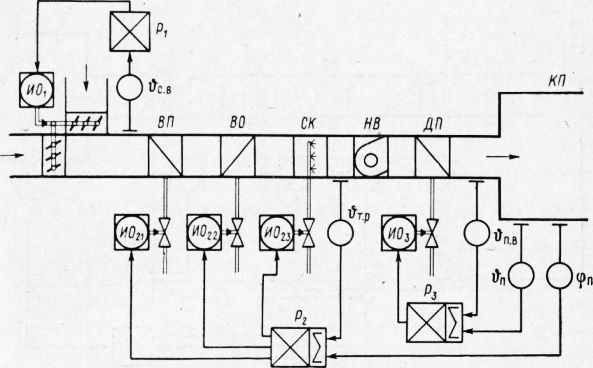
Рис. 6. Регулирование точки росы и температуры помещения.
Управление температурой осуществляется посредством смешения воздуха (Рх), а при необходимости — с помощью дополнительного подогревателя (Р3). При этом измеряемая величина в используется для ограничения температуры подводимого воздуха.
г) Прямое регулирование влажности и температуры воздуха помещения. Изображенный на рис. 7 метод прямого регулирования температуры и влажности воздуха помещения обеспечивает более экономичный в сравнении с регулированием по методу точки росы принцип действия.
Из блок-схемы видно, что регулятор температуры помещения Рг оказывает воздействие в зависимости от режима работы установки на исполнительные устройства смесительных заслонок, подогревателя, охладителя или дополнительного подогревателя. С другой стороны, регулятор влажности помещения Р2 выборочно действует на исполнительные органы охладителя или подачи воды к соплам подогревателя. Таким образом, оба регулятора частично действуют на одни и те же исполнительные устройства или, иными словами, здесь имеет место контур управления с дополнительной перекрестной связью выходных величин. При этом условии управляющее устройство может быть представлено также и в виде показанного штрих-пунктирными линиями комплексного двухконтурного регулятора К ДР.
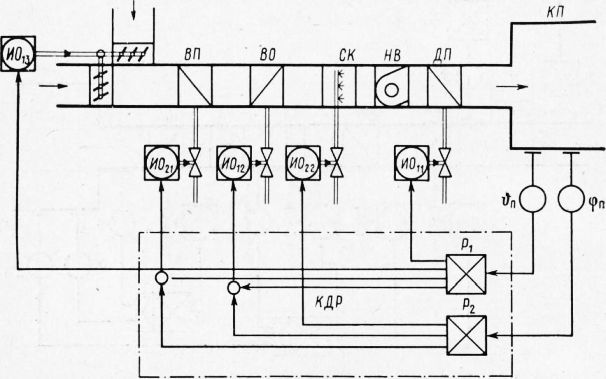
Рис. 7. Прямое регулирование влажности и температуры помещения.
При соответствующем расчете искусственно введенной связи на стороне управления можно ликвидировать имеющую место связь между объектами управления, т. е. устранить взаимную зависимость между обеими переменными системы регулирования (автоматизация).
Применяемые устройства. После рассмотрения функциональных аспектов системы кондиционирования воздуха необходимо кратко остановиться на применяемых в системах кондиционирования элементах.
При автоматизации системы кондиционирования воздуха следует прежде всего исходить из того, что большое количество необходимых для этого регуляторов, особенно на пассажирских судах, обусловливает необходимость применения возможно более дешевых аппаратурных решений. По этой причине в первую очередь применялись регуляторы прямого действия без использования вспомогательной энергии, датчики температуры которых работают по принципу расширения газа или жидкости. Однако недостатки таких устройств (короткие расстояния, неблагоприятные передаточные функции), а также рабочие характеристики исполнительных органов привели к применению электрических двухпозиционных регуляторов, которые в настоящее время получили.распространение для решения сравнительно простых задач регулирования.
Однако с учетом неблагоприятных динамических характеристик многоступенчатых установок для обработки воздуха и больших помещений, возрастающие требования к точности стабилизации и обеспечения комфорта установками кондиционирования воздуха могут быть решены только с применением регуляторов непрерывного действия с несколькими входными величинами. Во многих случаях применение П-регуляторов оказывается уже недостаточным, и приходится применять регуляторы с временными характеристиками (регуляторы ПИ- и ПИД-действия). Дальнейшее повышение затрат на устройства управления связано с применением двухконтурных схем регулирования с независимыми параметрами.