Ввиду сравнительно низкой стоимости интерес представляет также стабилизация судна посредством пассивных цистерн с автоматическим управлением. Прежде чем обратиться к автоматизации этих систем, необходимо рассмотреть некоторые принципиальные возможности получения информации о состоянии судна при качке.

Рис. 1. Схема действия гироскопического аппарата.
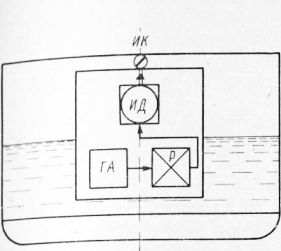
Рис. 2. Схема регулируемой системы стабилизации судна посредством пассивных успокоительных цистерн.
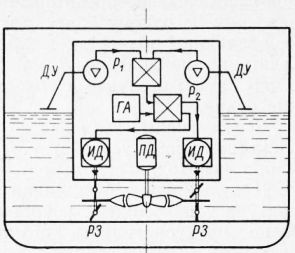
Рис. 3. Схема регулируемой системы стабилизации судна посредством активных успокоительных цистерн.
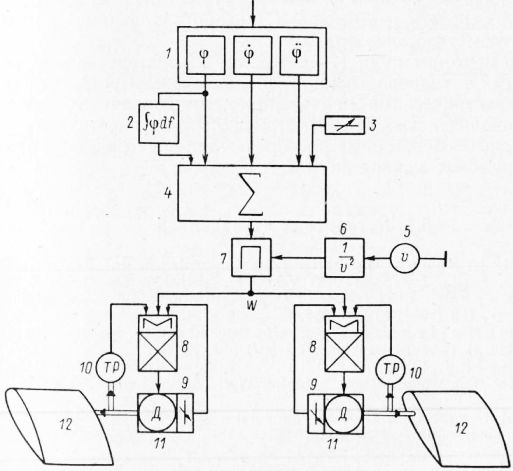
Рис. 4. Блок-схема системы автоматической стабилизации судна посредством бортовых рулей.
Все сигналы подводятся через соответствующие подсистемы к смесительному устройству, где они суммируются, усиливаются и при необходимости демодулируются.
Для поворота рулей левого и правого борта предусмотрены два следящих контура управления, работающие в противоположных направлениях. В сумматоре системы управления уровнем задающая величина сравнивается с действительной величиной угла атаки а, которая измеряется с помощью датчика угла поворота. Для улучшения динамики исполнительных контуров в систему иногда вводится также и скорость перестановки (поворота плавников), измеренная посредством тахогенераторов.
Если бортовые рули приводятся в действие не электрическим приводом, а гидравлическим исполнительным устройством, то между электрическими и гидравлическими исполнительными элементами дополнительно предусматриваются соответствующие передаточные звенья (системные преобразователи, устройства управления, гидравлические усилители и т. д.).