Рассматривая синхронный генератор как объект регулирования, необходимо выделить три принципиально различных режима его работы: одиночную работу, синхронизацию и параллельную работу с другими генераторами.
Для обеспечения нормальной работы приемников электрической энергии в системе должно производиться регулирование частоты и напряжения генератора с целью поддержания этих параметров в допустимых пределах. Если напряжение генератора представить в виде вектора в двухмерном пространстве, то регулирование частоты и напряжения можно свести к соответствующим изменениям этого вектора. При этом контроль модуля вектора напряжения возлагается на систему регулирования возбуждения синхронного генератора, а управление положением вектора производится изменением подачи рабочего тела в приводной двигатель генератора.
Разработанные в настоящее время регуляторы возбуждения синхронных генераторов с достаточно высокой точностью обеспечивают постоянство абсолютной величины напряжения.
Рассмотренные в настоящей главе современные системы регулирования частоты и активной мощности контролируют только угловую скорость вектора напряжения, так как регуляторы приводных двигателей синхронных генераторов регулируют лишь угловую скорость вала агрегата, не обеспечивая необходимого взаимного расположения вектора э. д. с. генератора и напряжения сети и, следовательно, не сохраняя на длительное время условия для включения генератора на параллельную работу с сетью. Таким образом, для обеспечения трех указанных выше режимов работы синхронных генераторов устройство регулирования частоты должно быть дополнено системой синхронизации, что усложняет общую систему управления синхронными генераторами, снижает надежность ее работы и затрудняет ее обслуживание.
Подробный анализ существующих систем управления генераторными агрегатами позволяет сделать вывод, что более совершенным является принцип регулирования частоты по углу рассогласования.
Сущность принципа регулирования по углу заключается в том, что положение векторов напряжений или э. д. с. генераторных агрегатов, работающих параллельно, сравнивается с вектором напряжения генератора постоянной частоты (ГПЧ) или каким-либо вектором, принятым за эталонный (опорный) и являющимся общим для всей системы. Сигнал, пропорциональный величине углов между векторами напряжения агрегатов и ГПЧ, используется как обратная связь системы регулирования. Для обеспечения повышенной устойчивости системы должны вводиться первая и вторая производные сигнала ошибки по углу.
Регулирование по углу позволяет обеспечить синхронное и синфазное вращенир валов электрически не связанных генераторных агрегатов и, следовательно, в любой момент позволяет включить
их на параллельную работу без дополнительных затрат времени на синхронизацию.
Разработанная в Николаевском кораблестроительном институте система регулирования синхронных генераторов по углу основана на применении принципиально нового регулятора и предлагается для использования в судовых и других автономных электроэнергетических системах.
Регулирование по углу отличается от регулирования скорости тем, что воздействие на регулируемый объект призводится не при изменении угловой скорости, а при возникновении угла а между положением ротора генератора, определяемым вектором э. д. е., и осью магнитного поля задающего двигателя, определяемого вектором напряжения источника опорной частоты.
Устройство регулирования по углу должно состоять из трех основных элементов: измерителя моментов ИМ задающего двигателя, силового поршня и источника питания ИП системы управления. Конструктивно объединенное в один гидравлический блок устройство регулирования по углу схематично представлено на рис. 20.
Источник питания состоит из двух генераторов постоянного расхода, в качестве которых могут использоваться объемные шестеренные или плунжерные насосы. При постоянной скорости привода расход для таких насосов является примерно постоянной величиной; с закрытием линии нагнетания давление увеличивается при практически неизменном значении расхода.
Измеритель моментов ИМ измеряет создаваемый задающим двигателем момент и преобразует его в разность гидравлических давлений. В качестве используется двойной вращающийся гидравлический потенциометр.
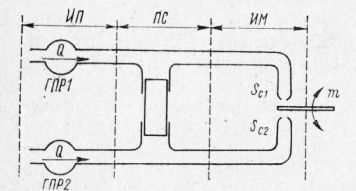
Рис. 1. Устройство регулирования по углу.
Двойной вращающийся гидравлический потенциометр представляет собой совокупность двух потенциометров, сопла которых связаны с вращающимся валом приводного двигателя синхронного генератора, а заслонка — с ротором задающего двигателя.
В представленном на рис. 20 регуляторе режим работы гидравлического потенциометра приближается к релейному. В момент перекрытия заслонкой одного из сопл, например, его сопротивление стремится к бесконечности, а сопротивление открытого сопла — к нулю. При этом весь расход генератора будет обусловливаться лишь перемещением силового поршня.
Силовой поршень, перемещаясь под воздействием перепада давления АР, возникающего между закрытой и открытой полостями гидравлического потенциометра, вызывает соответствующее изменение подачи топлива (или пара) в приводной двигатель, направленное на восстановление статического режима установки.
Регуляторы по углу используются также в системах ГЭУ. Поэтому практическая реализация и примеры использования принципа регулирования по углу рассмотрены во второй части настоящего пособия.