В настоящее время создано и используется несколько сотен подводных аппаратов обитаемых (ПОА) и необитаемых. Области их применения весьма разнообразны. Значительное число ПОА используется в качестве научно-исследовательских баз, решающих многочисленные задачи теоретической и прикладной океанологии. Ряд ПОА используется с целью обследования кабельных линий, обслуживания нефтяных разведочных станций. Наконец, существуют ПОА, предназначенные для осуществления аварийно-спасательных работ и участия в судоподъеме.
Подводные обитаемые аппараты различаются по глубине погружения. Подавляющее большинство ПОА имеют глубину погружения до 600 м и используются для проведения“ исследований в пределах шельфовой зоны Мирового океана. Меньшее число ПОА имеет глубину погружения до 2000 м. Созданы отдельные подводные аппараты, которые могут проводить исследования на глубинах свыше 2000 м.
Подводные обитаемые аппараты различаются по условиям обитания экипажа. Подавляющее большинство ПОА имеют прочные, герметизированные от внешней среды отсеки для экипажа, где последний находится в условиях нормальной атмосферы.
В связи с освоением шельфа появились и эффективно используются аппараты с водолазными отсеками. Этот класс аппаратов описан выше.
Проведение исследовательских работ является трудоемкой и сложной задачей. Эти сложность и трудоемкость определяются рядом факторов, главные из которых следующие. Как всякое плавающее тело, подводный аппарат не имеет жестких фиксирующих связей со стороны внешней среды. В связи с этим положение подводного аппарата над объектом работ обычно не зафиксировано жестко. Это значит, что всякое силовое взаимодействие подводного аппарата с объектом исследований будет вызывать его относительное смещение. Кроме того, внешние силовые факторы, такие, как течения, также приводят к неустойчивому положению ПОА над объектом работ. Поэтому вопрос стабилизации положения ПОА над объектом оказывается одним из важных. Очевидно, что системы движения и управления подводного аппарата должны обеспечивать его длительное статическое положение в заданной точке пространства.
Другим фактором, осложняющим выполнение ПОА исследовательских работ, является низкая эффективность исполнительных рабочих органов—манипуляторов. Стремление к возможно полному моделированию двигательных функций руки человека приводит к существенным усложнениям конструкции, увеличению массы манипулятора и сложности управления им.
В настоящее время основные усилия специалистов направлены на создание эффективных способов и систем управления манипуляторами, которые повторяют чисто механические действия оператора программным блоком и бортовой ЭВМ. Одновременно стремятся оптимизировать и кинематическую структуру манипулятора в соответствии с задаваемым перечнем необходимых операций.
Вызывает затруднения при проведении исследований под водой с помощью ПОА и ограниченная возможность визуального контакта оператора с объектом работ.
Сравнительно низкая прозрачность водной среды, ограниченность поля наблюдения, сложность организации освещения объекта работ —все это отличает условия работы ПОА от первичных наземных условий. Значительные затруднения в проведении работ возникают в связи с неизбежным взмучиванием воды в процессе контакта ПОА или его манипулятора с грунтом. В ряде случаев наступает полная потеря видимости и невозможность дальнейшего продолжения работ, требующих визуального контакта. В последние годы в связи с развитием методов управления манипуляторами появилась надежда организации программных циклов выполнения операций органами, оснащенными специальными тактильными датчиками. Такие методы управления позволяют выполнять отдельные элементы операций в условиях полной потерн визуального контакта оператора с объектом работ.
Учет перечисленных факторов часто в значительной степени влияет на структуру ПОА и его конструкцию.
Конструктивно ПОА обычно представляет собой комплекс систем и узлов, установленных на несущей рамной конструкции. Как правило, ПОА имеют обтекаемую форму, которая создается навешиваемым легким корпусом. Легкий корпус, изготавливаемый обычно из пластических материалов, не только придает обтекаемую форму, но также предохраняет системы аппарата от внешних повреждений и предотвращает от возможных зацепов под водой, т. е. повышает безопасность подводного плавания.
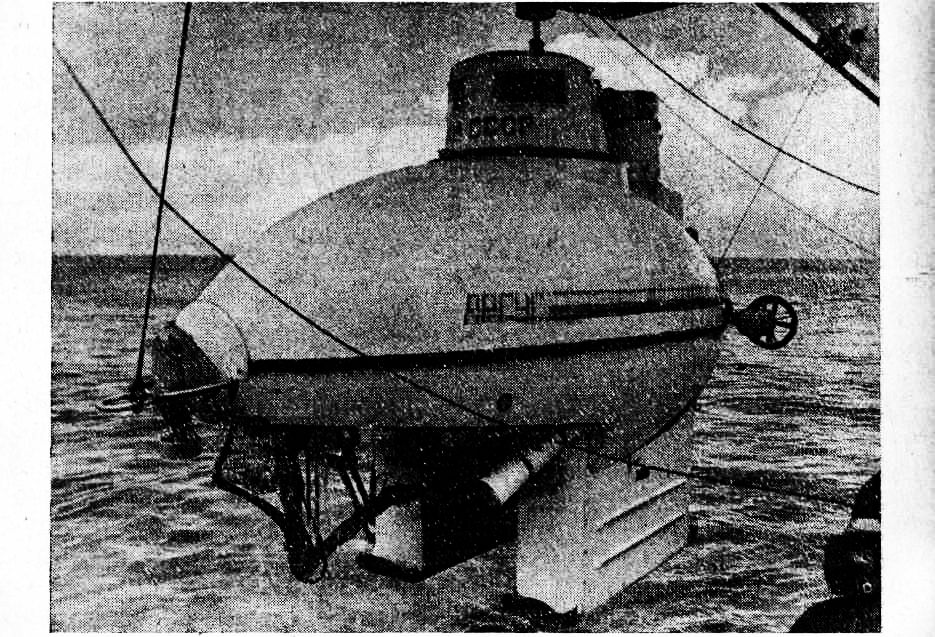
Рис. 1. Подводный обитаемый аппарат.
Для размещения экипажа аппарата, а также систем информации и управления используется прочный корпус. Его размеры и внутренняя компановка в существенной мере определяют удобство размещения членов экипажа, аппаратуры контроля и управления.
Существует несколько схем расположения экипажа в прочном корпусе.
Наблюдатель и пилот могут находиться у иллюминаторов лежа. Такое расположение обеспечивает хорошие условия наблюдения, однако затрудняет длительное управление как аппаратом, так и манипулятором.
Наблюдатель и пилот могут находиться в специальных креслах. В этом случае необходимо применять иллюминаторы размером не менее 150 мм для обеспечения необходимого обзора рабочего пространства. Известны примеры использования для наблюдения специальных оптических панорамных систем, передающих изображение непосредственно к глазам сидящего экипажа. При этом, естественно, возникают затруднения с наблюдением за пилотажными и другими приборами аппарата. Кроме того, любая оптическая система ведет к сокращению воспринимаемой информации. Иногда для наблюдения за рабочим пространством используются телевизионные системы. Тогда потеря информации о внешней среде становится еще более значительной. В то же время положение экипажа сидя наиболее удобно и позволяет эффективно управлять копирующим манипулятором.
Пилот может сидеть в кресле, наблюдатель лежит непосредственно у иллюминатора. В этом случае для наблюдения созданы наилучшие условия, а пилотирование аппарата затруднено недостатком визуальной информации.
Как очевидно, сидячее положение экипажа в креслах оказывается наиболее комфортным. Однако при этом необходимо обеспечить достаточно хороший обзор внешнего пространства. Этого можно добиться либо применением прозрачных прочных корпусов из акрила, либо установкой достаточного количества сферических иллюминаторов, желательно, диаметром не менее 0,4 м. Оба технических решения реализованы, например, на подводных аппаратах «Джонсон Си Линк» и «МОАНА» и обеспечивают высокую эффективность работы пилотов и наблюдателей.
Не менее существенное влияние на эффективность действий ПОА оказывают расположение и конструкция органов управления“. Весьма важно, чтобы число органов управления было сведено до минимума. Весьма высокой эффективностью отличаются мнемонические рукоятки управления как движением подводного аппарата, так и движением манипулятора. При этом весьма важно сосредоточить управление, например, манипулятором в одной рукоятке. Очевидно, что принцип копирования движений, предусматривающий наличие управляющей кинематической цепи манипулятора в прочном корпусе аппарата, оказывается весьма неудобным из-за трудности размещения такого управляющего органа.
Для изменения плавучести подводного аппарата при его погружении и всплытии используется система переменного балласта. На ПОА обычно применяются системы жидкого и твердого балласта. Система жидкого балласта используется, как правило, для изменения плавучести ПОА в приповерхностных слоях. В балластные цистерны принимается вода, при этом аппарат теряет плавучесть. Либо вода вытесняется из цистерны сжатым воздухом, и плавучесть аппарата при этом повышается.
1акая система изменения плавучести может использоваться и на больших глубинах. Однако с увеличением глубины приходится увеличивать и давление воздуха в баллонах и его количество.
Существуют проекты использования для продувки водяного балласта газа высокого давления, образующегося от пороховых зарядов или регулируемых химических реакций. В этом случае система жидкого балласта сможет быть эффективной и на больших глубинах. Довольно часто для изменения плавучести ПОД на больших глубинах используется система твердого балласта. Она применяется как для всплытия ПОА, так и для снижения скорости погружения у дна. Она же используется как аварийная. ПОА обычно в аварийной ситуации может всплыть на поверхность только при условии сброса определенного количества твердого балласта.
Для обеспечения надежности всплытия ПОА предусматривается сброс двух видов твердого балласта: аварийного — в виде монолитного металлического груза и сброс тяжелого забортного оборудования — аккумуляторные батареи, манипуляторы и т. п.
В результате изменения плотностных характеристик водной среды меняется в определенных пределах и плавучесть ПОА. Кроме того, при работе ПОА на дне возникает необходимость создания определенной отрицательной плавучести либо компенсации массы принятых на борт образцов пород и грунта. С этой целью подводные аппараты оборудуются уравнительной системой. Она располагается вне прочного корпуса аппарата. Возможно использование уравнительной системы двух видов: работающей на забортной воде и работающей на масле. Забортная вода принимается в специальный прочный корпус, а затем может быть откачана из него насосом. Если в качестве рабочего тела используется масло, то уравнительная система состоит из двух емкостей. Одна емкость — это прочная цистерна, а другая — эластичная цистерна, чаще всего в виде резинового мешка, помещенного в проницаемую металлическую оболочку. Обе емкости соединены между собой масляным насосом. Система получается изолированной от внешней среды. При перекачке масла из прочной цистерны в резиновый мешок или перепуске масла в обратном направлении меняется плавучесть аппарата, определяемая разницей плотности масла и воды. При этом существует возможность достаточно точно управлять плавучестью ПОА. Система переменной плавучести ПОА является одной из основных. Ее характеристика существенно влияет на эффективность аппарата при выполнении работ манипулятором.
Для успешной работы манипулятором необходима надежная фиксация ПОА относительно объекта работ. Наиболее просто это обеспечивается приданием ПОА некоторой отрицательной плавучести, которая зависит от развиваемых манипулятором усилий и моментов и характера поверхности дна.
Существенным для проведения исследовательских операций является также точный и плавный вертикальный подход ПОА к объекту только за счет сил плавучести. Это оказывается важным особенно в условиях сильно заиленного дна, когда управление вертикальным движением аппарата с помощью движителей приводит к взмучиванию придонных слоев воды и к потере видимости.
В процессе исследовании ооычно возникает необходимость сбора образцов и проб, доставки контейнеров аппаратуры и т. п. В связи с этим ПОА, предназначенные для проведения подводных операций, должны располагать возможно большим запасом плавучести, создаваемой на глубине уравнительной системой.
Для управления ПОА в пространстве используется крено-дифферентная система. Дифферент часто создается., например, для увеличения скорости погружения или всплытия аппарата.
Крено-дифферентная система представляет собой систему прочных цистерн, расположенных по бортам, в носу и корме аппарата, между которыми перекачивается рабочее тело. В качестве последнего чаще всего используется вода, а в ряде случаев ртуть или смесь масла со стальными шариками. Наконец, изменение дифферента аппарата может быть достигнуто перемещением по направляющим специального твердого груза.
Перекачивание воды в крено-дифферентной системе из цистерн осуществляется специальными насосами. Если рабочим телом является ртуть, то ее перемещение обеспечивается путем выжимания маслом, подаваемым насосом в цистерну с разделительной диафрагмой. Такая система носит название ртутно-масляной.
Крено-дифферентная система подобно уравнительной позволяет с высокой точностью и плавностью изменять крен и дифферент аппарата, что создает необходимые условия для работы манипулятора. После взятия предмета манипулятором восстановление первоначального положения аппарата становится возможным с помощью крено-дифферентной системы.
Важным качеством подводных аппаратов является их высокая маневренность, способность к резкому изменению траектории и скоростей движения во всех направлениях. Только в режиме установившегося движения, являющегося в известной степени вспомогательным, подводный аппарат движется преимущественно в горизонтальной или вертикальной плоскостях. В режиме же зависания над объектом работ и локального маневрирования около него преимущественные направления движения выделить трудно — все они по параметрам оказываются равноценными. Таким образом, режим маневрирования и позиционирования для подводных аппаратов, предназначенных для проведения исследовательских работ, оказывается основным. Очевидно, что задачей движительного комплекса в этом случае является обеспечение этих движений в широких диапазонах скоростей и ускорений, а значит, необходимо, чтобы все шесть обобщенных координат подводного аппарата были управляемыми.
Обеспечение требования контролируемости и управляемости всех шести обобщенных координат подводного аппарата может быть достигнуто следующими способами. Во-первых, может быть использована схема, где число движителей равно числу контролируемых и управляемых координат. В этом случае каждая пара движителей перемещает подводный аппарат по двум координатам, реализуя поступательное и вращательное его движения. Во-вторых, может быть применена схема, где используются поворотные колонки с винтами в насадках либо крыльчатые движители. В этом случае число движителей может быть вдвое меньше числа управляемых координат. Для управления движением подводного аппарата по всем шести координатам достаточно трех таких движителей, расположенных в горизонтальной плоскости под углами 120°.
В качестве движителей подводных аппаратов обычно используются средства активного управления, так как на малых скоростях движения, характерных для подводных аппаратов, обычные рули становятся неэффективными. Средства же активного управления сочетают движительные функции с функцией управления. К ним относятся винты с насадками на поворотных колонках, водометные поворотные движители, крыльчатые движители. Все они, помимо создания вектора упора, обеспечивают еще и вращение его в плоскости, изменяя направление результирующей тяги в широких пределах.
Наиболее простым в конструктивном отношении является движитель типа поворотной колонки с винтом в насадке. Крыльчатые движители сочетают свойства винтового движителя регулируемого шага и органа управления и обладают высокой скоростью изменения упора и его направления в пространстве, за счет чего оказываются чрезвычайно эффективным средством маневрирования. Недостаток—сложность кинематики и конструкции.
Наконец, водометные движители создают упор за счет энергии выбрасываемой струи воды. Они весьма просты в конструктивном отношении, однако обладают весьма низким КПД и малым быстродействием.
Анализ процесса перемещения подводного аппарата позволяет сделать вывод о необходимости и достаточности контролируемого изменения только одного параметра — расстояния подводного аппарата до цели. Это может быть обеспечено использованием комплексного мнемонического управляющего органа.
Возможности подводного аппарата по продолжительности активных действий определяются системой его энергетики. Существенный объем энергии обычно тратится в процессе переходов ПОА и маневрировании, а также при работе манипулятора. Динамическое позиционирование ПОА относительно объекта также является энергоемким режимом.
На современных ПОА применяются аккумуляторные батареи и, в порядке эксперимента, топливные элементы и атомные энергетические установки.
В качестве аккумуляторных батарей используются батареи свинцово-кислотных, серебряно-цинковых и кадмиево-никелевых аккумуляторов. Как правило, аккумуляторные батареи располагаются вне прочного корпуса, в отдельных непрочных корпусах, залитых диэлектрической жидкостью. Применяются также полностью изолированные от воды аккумуляторные батареи с резиновыми компенсаторами давления на каждой банке. В последние годы вместо аккумуляторных батарей на ПОА стали применять топливные элементы, для которых в качестве топлива служат водород, натрий, литий, а окислителем — кислород, хлор и их соединения. Исследования показали, что КПД топливных элементов может достигать 80 % и более.
Исследовательские ПОА большого водоизмещения планируете» оснащать атомными энергетическими системами. Работы по их созданию ведутся в США.
Для наблюдения дна и объектов на нем необходимо обеспечить его детальное и объемное восприятие. С этой целью на ПОА устанавливаются наружные светильники. Светильники могут устанавливаться неподвижно или иметь возможность перемещения. Подвижные светильники могут либо изменять направление своей оптической оси, либо перемещаться линейно на выносных телескопических штангах. В качестве источников света используются различные лампы накаливания, в частности лампы с йодным циклом. Для фотографирования дна применяются импульсные лампы.
В США выполнены исследования новых методов организации освещения дна стробирующим светом высокой мощности. Такое освещение используется при картографировании дна, когда необходимо получить за одно экспонирование большую площадь дна. При этом, естественно, разрешение получается невысоким. Такие испытания проводились на ПОА «Алвин».
Импульсный светильник энергией 50 кДж вместе с рефлектором смонтирован на корпусе из синтактики и подвешен на кабель-тросе к верхней части ПОА на высоте 20 м над ним. При движении ПОА над грунтом на расстоянии порядка 10 м производится фотографирование дна. Следует заметить, что такой способ фотографирования целесообразно использовать в условиях малопрозрачной воды.
Подводные необитаемые аппараты (ПНА) составляют большую самостоятельную группу подводно-технических средств исследования. океана.
Длительное использование ряда ПНА с исследовательскими целями показывает, что с их помощью возможно решать ряд научных задач, которые недоступны достаточно развитым традиционным методам исследования. Так, подавляющее большинство гидрофизических и геофизических исследований у дна практически могут быть качественно выполнены лишь подводными аппаратами, а некоторые из них — лишь аппаратами необитаемыми.
Существующие и создаваемые образцы ПНА различаются по глубине погружения. В связи с этим их, так же как и ПОА, можно разделить на три группы: малых глубин — до 600 м, средних глубин — до 2000 м и больших глубин — свыше 2000 м. Предельная глубина погружения аппарата существенно определяет его конструктивное выполнение, степень сложности аппаратуры управления, и в конечном счете возможности аппарата. Наибольшее число ПНА принадлежит к группе аппаратов малых глубин.
Значительно меньше аппаратов для средних глубин.
Отдельные образцы ПНА могут быть отнесены к группе аппаратов больших глубин — глубоководных. Необитаемые подводные аппараты могут быть разделены по функциональному признаку на автономные и привязные. Привязные аппараты в свою очередь делятся на буксируемые и зондирующие.
Автономные ПНА предназначены для решения исследовательских задач по заранее определенной программе. Их в настоящее время относят к простейшим роботам. Такие аппараты могут работать либо в толще воды, либо непосредственно у дна.
Работа ПНА в толще воды может проходить как в строго зондирующем режиме по вертикали, так и в режиме пространственного зондирования, когда спуск и подъем происходят, например, по спирали.
Работа автономных ПНА у дна осуществляется по заранее заданной траектории либо по прямой, либо параллельными галсами, либо по раскручивающейся спирали. В процессе таких движений также по программе происходят измерение и запись параметров среды либо съемка рельефа и фотографирование дна. В отдельных случаях таким аппаратом возможно задавать программируемый отбор проб воды, но в ограниченных количествах. Известны режимы работы автономных аппаратов, когда их программное движение прерывается покладкой на грунт на достаточно длительное время, в период которого также происходят программируемое измерение и запись параметров среды.
Информационный обмен между автономными аппаратами и обеспечивающим судном, как правило, осуществляется по гидроакустическому каналу в очень ограниченных объемах.
Достаточно большую группу составляют привязные буксируемые аппараты. Высокой эффективностью отличаются буксируемые системы, с помощью которых удается выполнять длительные измерения параметров среды на заданных горизонтах и осуществлять картографирование дна. Такие системы буксируются обеспечивающим судном на прочном кабель-тросе, по которому также осуществляется и информационный обмен (рис. 53).
Привязные зондирующие ПНА обычно спускаются, с неподвижного обеспечивающего судна. От способности судна длительно сохранять неизменным свое положение в существенной степени зависит эффективность действий, таких подводных аппаратов. Обычно привязные зондирующие аппараты имеют средства движения в толще воды — движители, которые позволяют им осуществлять маневрирование над дном и объектом работ. При этом, естественно, возникает проблема влияния кабельной линии, связывающей аппарат с судном обеспечения.
В последнее время возникла идея создания необитаемого привязного аппарата комбинированного типа. Зондирующий привязной аппарат оборудуется устройством изменения положения точки крепления кабельной линии. Это позволяет использовать такой аппарат как в режиме буксировки, так и при неподвижно стоящем обеспечивающем судне.
Подводные необитаемые аппараты конструктивно представляют собой комплекс систем и устройств, установленных на пространственной раме. Большинство подводных необитаемых аппаратов не имеют обтекаемого легкого корпуса. Однако в последнее время появились конструкции ПНА обтекаемой формы, которая создается съемным легким корпусом. А это становится исключительно важным, если ПНА имеет систему динамического позиционирования и должен длительно удерживаться над Объектом исследования. Высокое сопротивление становится причиной повышенного расхода энергии.
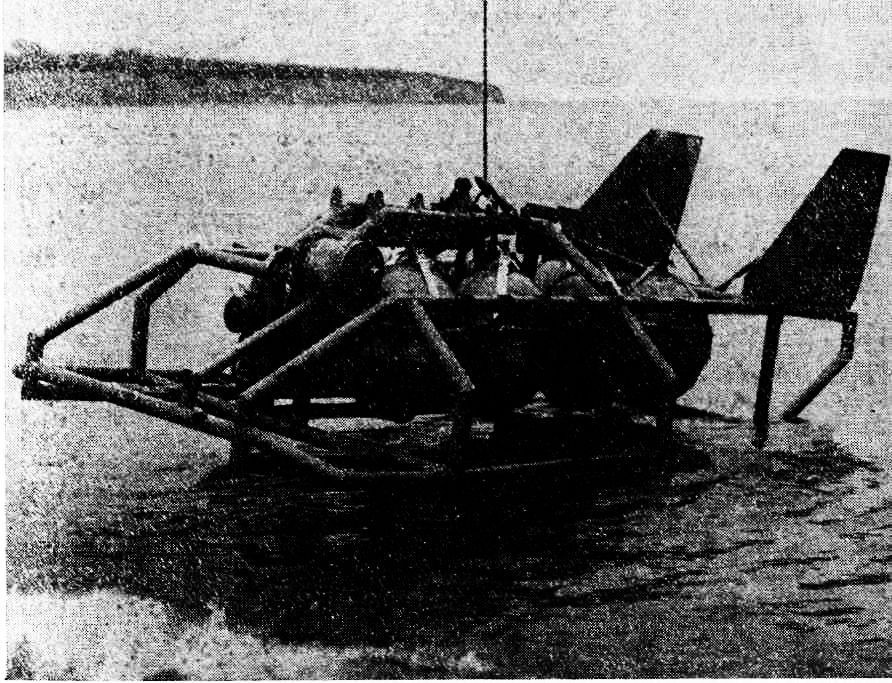
Рис. 2. Буксируемый подводный аппарат.
Подводный необитаемый аппарат имеет прочный корпус, который предназначен для размещения в нем аппаратуры управления, наблюдения, связи и навигации, а также для придания аппарату некоторой положительной плавучести. Обычно на аппаратах используется один или несколько прочных корпусов, имеющих как Цилиндрическую, так и сферическую формы. Для придания аппарату нейтральной или небольшой положительной плавучести начиная с глубин 1000—1500 м дополнительно используются плавучие синтактические материалы с плотностью от 0,5 до 0,7 т/м3, выдерживающие высокое внешнее гидростатическое давление.
Они устанавливаются в виде отдельных блоков, которыми заполняются промежутки между системами ПНА. Необитаемые аппараты перемещаются в воде либо буксировкой, либо специально установленными движителями. Первые образцы ПНА имели два или три движителя, которые обеспечивали движение аппарата, в главных направлениях. По мере усложнения операций, выполняемых аппаратами, возрастали требования к их управляемости.
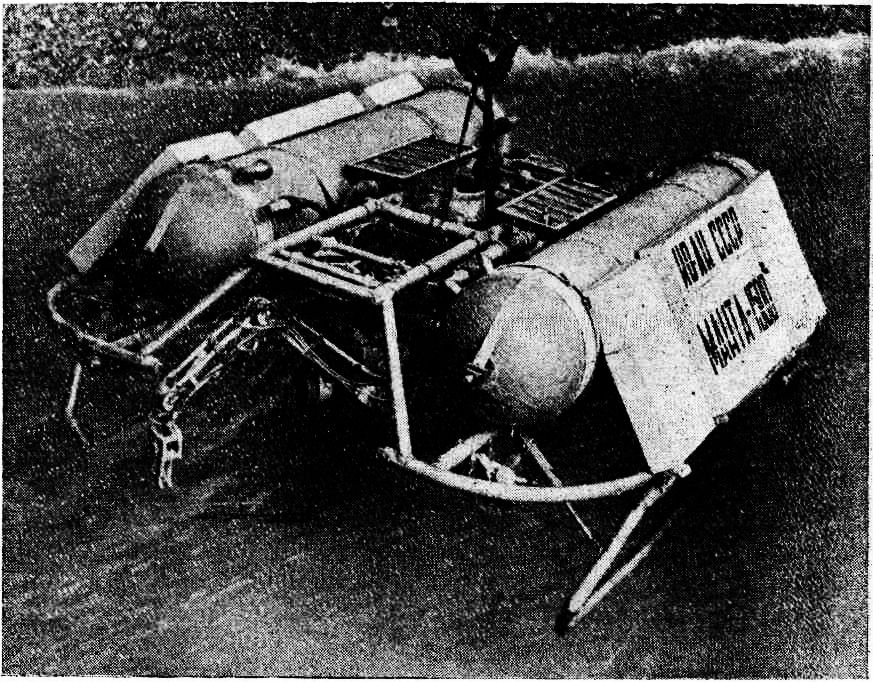
Рис. 3. Телеуправляемый подводный аппарат.
Они могли быть удовлетворены, естественно, лишь при условии применения развитой движительной системы, способной контролировать и изменять все шесть обобщенных координат аппарата в пространстве.
Функцией движительной системы является выдерживание заданного горизонта позиционирования или движения, аппарата. Энергетически часто оказывается более выгодным статическое регулирование нулевой плавучести аппарата, при котором дальнейшие затраты на динамическое управление оказываются существенно меньшими. Регулирование обычно осуществляется с помощью специальной уравнительной системы. Такое конструктивное решение принято, например, на аппарате «ТРОВ».
На буксируемый аппарат энергия движения механически передается буксирной линией — кабель-тросом. Маневрирование же буксируемого аппарата в пространстве осуществляется либо путем изменения скорости хода судна и изменения длины кабель-троса, либо применением управляемых гидродинамических плоскостей. Следует отметить, что гидродинамические плоскости оказываются эффективными только на скоростях буксировки свыше 3 уз. На меньших скоростях буксировки управление траекторией движения аппарата происходит за счет изменения длины кабель-троса. На малых скоростях буксировки достаточно эффективным средством изменения траектории могут быть пропульсивные движители аппарата, которые совместно с системой стабилизации способны поддерживать необходимые параметры движения. Очевидно, что энергетически такое решение оказывается наименее выгодным, хотя и достаточно эффективным.
Заданные параметры движения или положения в пространстве ПНА обеспечиваются системой управления. При этом для всех ПНА, кроме привязных зондирующих, стоит задача управления заданной траекторией движения. Для привязных зондирующих аппаратов наряду с первой существует вторая задача длительного сохранения неизменным положения аппарата над объектом исследования — задача динамического позиционирования. В режиме движения по заданной траектории обычно контролируются следующие параметры: глубина или отстояние от грунта, курс, крен и дифферент. Значения всех этих параметров даются соответствующими датчиками: датчиком глубины, эхолотом, датчиками угловых скоростей, гироскопической системой аппарата.
По мере развития ПНА совершенствовались принципы управления ими. Первые образцы аппаратов управлялись раздельными органами управления. По мере увеличения числа движителей и усложнения траектории движения аппарата возникла необходимость в применении комплексных органов управления. Так появились комплексные мнемонические рукоятки управления, с помощью которых управление происходит в коде движения руки оператора. Дальнейшее совершенствование принципов управления привело к созданию системы супервизорного управления. В наиболее простом варианте построения такой системы оператор задает координаты точки района, в которую необходимо вывести аппарат. Координаты задаются непосредственно на изображении района — на экране телевизионного или гидролокационного дисплея. Специальный вычислительный блок принимает это задание и формирует необходимые команды на каждый из движителей аппарата.
Существенное влияние на эффективное использование применяемых принципов управления ПНА имеет система связи с обеспечивающим судном. Аппараты малых глубин обычно связаны с обеспечивающим судном с помощью многожильного кабеля. В ряде конструкций аппаратов для передачи каждой команды использовалась отдельная линия в кабеле. Однако чаще всего применяется уплотнение канала связи. Наибольшее распространение имеет временное уплотнение либо частотно-временное. При этом, к аппарату передаете» информация управления, а на обеспечивающее судно к оператору передается информация контроля параметров состояния аппарата, а также видеоинформация от телевизионной и гидроакустической систем.
На аппаратах малых и средних глубин видеоинформация передается обычно по отдельным коаксиальным линиям. Однако с увеличением рабочей глубины аппарата и длины кабеля такая схема передачи информации становится невозможной. Многожильные кабели заменяются начиная с глубины 2000 м на кабель-трос, содержащий одну коаксиальную пару.
Автономные аппараты поддерживают информационную связь с обеспечивающим судном, используя гидроакустический канал -связи. В силу нестабильности параметров гидроакустического канала связи и его частотной ограниченности информационный обмен между судном и аппаратом обычно существует на уровне простейших команд.
Ограниченные возможности кабельного канала связи существенно сказываются на эффективности ПНА. В то же время информация должна представляться в наглядной форме. Необходимо интегральное представление информации, обеспечивающее также «эффект присутствия» оператора, путем представления информации о параметрах движения ПНА на дисплее, где процесс представляется непрерывным движением чередующихся белых и черных полос. Скорость их движения точно соответствует скорости движения аппарата, а крен и дифферент отражаются соответствующими наклонами «бегущей дорожки». Испытания системы показали ее высокую эффективность. Подобные решения были реализованы в виде системы «Коналог», подвижных пультов управления, позволяющих включить в восприятие информации не только зрительный, но и вестибулярный анализатор человека. Ускоренное восприятие информации и быстрота реакции были, например, Обеспечены применением системы, состоящей из шлема с монитором, который кинематически связан рычажной системой с неподвижным креслом оператора. Все движения головы оператора фиксировались соответствующими датчиками положения, которые формировали команды управления аппаратом.
К системе наблюдения ПНА относятся система телевидения и гидроакустическая локационная система. В качестве телевизионных преимущественно используются малогабаритные системы с передающими трубками типа видикон. Качество изображения, наблюдаемого оператором, обычно зависит от ряда факторов: прозрачности воды, характеристики светильников, дальности наблюдения и параметров передающего устройства. Чрезвычайно важную роль играют длина и частотные характеристики кабельного канала связи. Для необитаемых аппаратов малых глубин получить высококачественное телевизионное изображение оказывается сравнительно просто. С ростом же длины кабеля ухудшаются его свойства, растет затухание и увеличиваются искажения телевизионного сигнала. Для глубоководных аппаратов возникает проблема одновременной передачи по одной коаксиальной паре всего массива информации и электроэнергии. Все это снижает качество телевизионного изображения.
Дополнительная информация об окружающей обстановке обеспечивается гидроакустическим локатором бокового обзора, который позволяет с достаточно больших расстояний в несколько сотен метров получить картину дна в наиболее общем виде, без детализации и с небольшим разрешением. Тем не менее в качестве предварительной и ориентирующей информации она оказывается чрезвычайно важной. Эта информация позволяет, во-первых, ориентироваться в подводной обстановке до того момента, пока не устанавливается визуальный контакт с помощью телевизионной системы, и, во-вторых, дает общее представление об исследуемом районе, хорошо дополняющее информацию о локальном пространстве, наблюдаемом телевизионной системой.
Навигационная система ПНА строится на основе донных гидроакустических маяков. Различают системы с длинной, короткой и сверхкороткой базой. Система с длинной базой предусматривает установку нескольких донных маяков-ответчиков на дне с расстоянием между ними несколько миль, а также одного гидрофона на обеспечивающем судне и одного маяка-ответчика на подводном аппарате. В системе с короткой базой на дне устанавливается один маяк-ответчик, а на судне — два гидрофона, на корме и носу. Кроме того, на подводном аппарате устанавливается маяк-ответчик. Донные маяки-ответчики и маяк-ответчик подводного аппарата дают сигналы по запросу с судна. Направления на каждый маяк и на подводный аппарат определяются по разности времени прихода сигналов на судовые гидрофоны. Наклонная дальность до маяков определяется по времени прохождения ответного сигнала. Для определения горизонтальной дальности измеряется глубина. В системе со сверхкороткой базой измеряются расстояние и направление на донный маяк — за счет разности фаз сигналов.
Энергетическая система ПНА имеет различные конструктивные варианты в зависимости от типа аппарата. Так, например, автономные ПНА обычно имеют бортовой запас электроэнергии в виде аккумуляторной батареи. Привязные же аппараты малых глубин получают энергию, как правило, по кабельной линии по специальным жилам. Однако с ростом глубин и длины кабеля: становится трудно передавать энергию значительной мощности. При переходе же на кабель-трос с одной коаксиальной парой передача электроэнергии на подводный аппарат вырастает в техническую проблему. В качестве одного из вариантов энергообеспечения глубоководных ПНА может быть использована система с промежуточным энергоякорем, энергозаглубителем (для буксируемых) или носителем более крупного водоизмещения, чем необитаемый аппарат. В этом случае ПНА имеет на борту необходимое количество аппаратуры управления и наблюдения, а энергозапас и часть вспомогательной аппаратуры размещаются на энергоякоре, заглубителе или промежуточном носителе. Энергоноситель с обеспечивающим судном связан кабель-тросом. С подводным аппаратом он может быть связан многожильным кабелем, по которому передается электроэнергия. В процессе работы аккумуляторная батарея подзаряжается электроэнергией, которая подается по одножильному кабель-тросу с обеспечивающего судна.
Энергоякорь может одновременно служить своеобразным носителем-ангаром для ПНА, в котором он доставляется на дно и поднимается на поверхность. В районе же работ у дна ПНА выпускается из ангара-носителя для выполнения работ.
Система исследовательской аппаратуры подводного обитаемого и необитаемого аппаратов обычно содержит измерительную аппаратуру, манипуляторы и различные пробоотборники.
В качестве измеряемых параметров среды обычно фигурируют направление и скорость течения, температура, давление, электрическая проводимость, скорость звука, реже концентрация растворенного кислорода и другие параметры. К этому же разделу относится магнитное поле Земли, измеряемое магнитометрами.
На ПНА часто устанавливаются локаторы бокового обзора и акустические профилографы.
В качестве пробоотборников на подводных аппаратах используются миниатюрные грунтовые трубки и дночерпатели. Иногда захват манипулятора делается подобным по конструкции дночер-пателю. Тогда операция отбора проб грунта выполняется непосредственно самим манипулятором. В остальных случаях манипулятор используется в качестве вспомогательного средства. Для взятия проб воды применяются специальные батометры.
При проведении исследований в толще вод океана и в придонном слое исключительную важность приобретает их комплексность. Поэтому появились комплексные исследовательские системы, в которых аппаратура объединена в единое целое. Объединение систем, работающих на различных физических принципах, позволяет исследовать явление многосторонне и тем самым повысить достоверность получаемых результатов.
Для спуска и подъема буксирной линии и носителя используются специальные буксирные лебедки большой мощности и канатоемкости.
Буксирные лебедки имеют токосъемник, обеспечивающий постоянную связь носителя с пультом управления в процессе работы лебедки. При больших глубинах и скоростях буксировки носителя резко возрастает длина буксирной линии. Это обстоятельство приводит к увеличению размеров барабанов лебедок и повышению мощности их приводов. В свою очередь это требует более крупных судов, а главное значительных площадей палубы. В последние годы появились буксирные системы, состоящие из транзитной тянущей лебедки и накопительной вьюшки. Транзитная лебедка должна развивать большие усилия, чтобы обеспечить выборку буксирной линии на ходу обеспечивающего судна. Обычно при длине буксирной линии до 7000 м требуемое усилие на барабане транзитной лебедки составляет около 15—20 т. Одна из наиболее распространенных содержит два много-„шкивных барабана, установленных друг за другом на небольшом расстоянии так, что пазы шкивов находятся друг против друга. Каждый из шкивов вращается своим отдельным приводом. Кабель-трос буксируемой линии пропускается последовательно через все пазы шкивов и уходит на накопительную вьюшку. Система спуска-подъема работает нормально при условии постоянного натяжения кабель-троса, поступающего на вьюшку.
Накопительная вьюшка состоит из барабана, кабелеуклад-чика, токосъемника и силового привода. В состав всей системы входит система управления натяжением кабель-троса, поступающего на вьюшку. В простейшем варианте она представляет собой фрикционное устройство между приводом и барабаном вьюшки, в котором усилие проскальзывания может регулироваться. Иногда, в простейшем варианте, используется блок с грузом, перемещающийся вертикально в направляющих. Через блок пропущен кабель-трос, который далее попадает на барабан накопительной лебедки. Такое устройство создает постоянное усилие натяжения кабель-троса, которое может регулироваться изменением массы пристыкованного к блоку груза.
Накопительные лебедки из-за больших размеров часто располагаются в трюме обеспечивающего судна.
Спуск на воду носителя и проход кабель-троса от тянущей лебедки в воду происходят обычно через специальные П-рамы или многозвенные гидравлические краны с использованием блоков больших диаметров. Для компенсации рывков от качки судна и нестабильности буксировки на спуско-подъемных устройствах (СПУ) устанавливаются специальные амортизаторы. П-рама и многозвенный кран должны обеспечивать вынос буксируемого аппарата за борт и спуск его на воду. При этом точка контакта буксирной линии с блоком СПУ должна располагаться по возможности ближе к поверхности воды.
В состав судового оборудования входят также системы, которые осуществляют сбор информации с буксируемого носителя, обрабатывают и записывают ее, а также управляют носителем.
К аппаратуре сбора и обработки информации относятся ин-дикторы, магнитные накопители и регистраторы. В состав этой аппаратуры включается ЭВМ, которая управляет поступлением информации и ее обработкой. При этом, помимо научной информации, ЭВМ получает и обрабатывает навигационную информацию, выводя ее для наглядности и оперативного принятия решения на графопостроитель. Пульт управления буксируемым носителем имеет органы управления самим носителем, а также органы Управления лебедкой.
Для обеспечения буксировки на больших глубинах на буксирную линию устанавливают дополнительные заглубители. В качестве заглубителей используются отрезки цепей, которые подвешиваются к буксирной линии с определенным шагом. Этой мерой
увеличивается масса буксирной линии, а это приводит к тому, что соотношение массы на метр погонной длины к гидродинамической выталкивающей силе растет и, следовательно, повышается заглубляющая способность буксирной линии. Существует способ увеличения заглубляющей способности буксирной линии, при котором специальный тяжелый заглубитель массой 500—700 кг устанавливается на буксирной линии в непосредственной близости от буксирного носителя, на расстоянии примерно 200—300 м. При очень большой глубине буксировки таких заглубителей может быть установлено на буксирной линии несколько.
При обтекании буксирной линии набегающим потоком воды появляется гидродинамическая сила сопротивления, составляющая которой стремится вытянуть кабель из воды. Кроме того, на определенных скоростях буксировки появляются достаточно сильные вибрации кабельной линии. Как показали исследования, причиной вибрации является образование с обеих сторон движущегося в воде кабель-троса вихрей с противоположным вращением. Они вызывают боковые перемещения кабель-троса в плоскости перпендикулярной направлению движения. Частота колебаний оказывается прямо пропорциональной скорости набегающего потока и обратно пропорциональной диаметру кабель-троса. Когда частота индуцированных колебаний совпадает с частотой собственных колебаний кабель-троса, наступает резонанс и образуется стоячая волна. Установлено, что вибрация вызывает увеличение буксировочного усилия примерно на 30 %, а также создает шумы, мешающие прохождению сигналов по кабель-тросу.
За счет повива наружной несущей оплетки кабель-троса при его обтекании появляется боковая составляющая гидродинамической силы, которая уводит буксирную линию с курса. Сопротивление при обтекании кабель-троса и его вибрации в потоке могут быть уменьшены применением специальных обтекателей, надеваемых на кабельную линию. Существуют конструкции обтекателей, которые постоянно находятся на буксирной линии. Используются также съемные обтекатели. Обтекатели надеваются при спуске буксируемого носителя и снимаются в процессе его подъема на борт.
В последние годы установлено, что обтекатели можно надевать лишь на часть буксирной линии, непосредственно примыкающую к буксируемому носителю.
Было также найдено, что если на кабель-трос поместить эластичные нити, то эти нити ламинизируют поток, создавая вокруг кабель-троса обтекаемую оболочку каплеобразной формы, а гидродинамическое сопротивление резко сокращается. Было установлено, что оптимальная длина нитей должна превышать диаметр кабель-троса в —10 раз. Недостатком этого способа являются быстрый износ нитей, их обрыв при намотке и смотке кабель-троса с барабана лебедки. Поэтому наиболее распространено все же использование съемных обтекателей.
Подводный буксируемый носитель поисковой аппаратуры состоит из собственно носителя и комплекса поисковой аппаратуры.
Носитель предназначен для размещения аппаратуры питания, аппаратуры поиска и системы управления параметрами движения. Существуют два типа носителей: пассивный и управляемый. Пассивный буксируемый носитель обычно имеет значительную отрицательную плавучесть и в процессе буксировки не изменяет параметры траектории своего движения. Управление изменением глубины буксировки обычно осуществляется за счет изменения длины буксирной линии. Следовательно, управление глубиной буксировки осуществляется оператором с помощью лебедки. Глубина, естественно, может меняться также и с изменением скорости хода обеспечивающего судна. Такого типа носители обычно используются при малых скоростях буксировки — до 2 узлов. На таких скоростях, как известно, гидродинамические рули оказываются малоэффективными и для того, чтобы получить значительные перестановочные усилия за счет гидродинамики, необходимо значительно развить площадь гидродинамических рулей. Если носитель имеет автономное питание или ограничение по питанию, подаваемому по буксирной линии, использование управляемых гидродинамических плоскостей становится нецелесообразным.
Для стабилизации курса движения пассивных носителей обычно используют стабилизирующую линию, которая укрепляется в кормовой части носителя и состоит из конусных насадок, укрепляемых последовательно друг за другом на стабилизирующей линии.
При больших скоростях буксировки и отсутствии ограничений по питанию используются буксируемые носители с органами управления траекторией движения. При скоростях буксировки 6 узлов и выше носителю придается обтекаемая гидродинамическая форма. В качестве органов управления используются либо гидродинамические рули, либо активные движители, например винты в насадках. В обоих случаях к носителю прикладывается дополнительная сила, меняющая траекторию его движения.
Управляемые буксируемые носители, как правило, имеют малую отрицательную плавучесть — порядка 500 Н. В этом случае становятся достаточно эффективными как гидродинамические рули, так и подруливающие средства активного типа. На борту носителя устанавливается система стабилизации его движения по тем параметрам, по которым осуществляется активное управление им. Обычно такие носители управляются по глубине погружения и по курсу.
К настоящему времени с использованием подводных аппаратов выполнен довольно значительный объем исследований по различным дисциплинам океанологии.
Гидрофизические исследования с использованием подводных аппаратов концентрировались преимущественно на изучении циркуляции придонных слоев воды с целью изучения как процессов водообмена, так и их влияния на дно океана. Эти сведения практически невозможно получить при исследованиях с надводного судна.
Так, подводным аппаратом «Дипстар-4000» изучалось распределение взвеси осадков в районе со сложным профилем дна в связи с изменением придонных течений. Известны случаи установки датчиков для измерения скорости течения на грунте с помощью телеуправляемого подводного аппарата «РАМ» и подводного аппарата «Пайсис». Измерения in situ проводятся с высокой точностью, а получаемые при этом данные более достоверны. Так, например, подводный аппарат «Бен Франклин» уточнил значение скорости течения Гольфстрим. Оказалось, что на значительном протяжении она составляет 5 узлов. Ранее скорость течения считалась равной 2 узлам.
Перечисленные исследования осуществлялись как подводными обитаемыми, так и автономными телеуправляемыми аппаратами «Дипквест», «Дипстар», «Пайсис», «Аллюминаут», «Бен Франклин», «Спурв», «Сидрон» путем измерения специализированной аппаратурой основных параметров среды, таких, как относительная скорость и направление течений, температура воды, соленость воды и гидростатическое давление. При этом практически всегда измерялись скорость звука в воде, а также отстояние аппарата от грунта. Как правило, измеренные параметры регистрировались в цифровом коде на магнитной ленте для последующей обработки на ЭВМ.
Большой интерес представляют исследования тонкой структуры гидрофизических полей, проводимые с помощью ПОА. Такие исследования с борта судна затрудняются его качкой и вибрацией кабель-троса, так как спектры качки и вибраций в значительной степени перекрывают спектры исследуемых процессов.
Подводный обитаемый аппарат как носитель измерительной аппаратуры свободен от этих недостатков. Он может зависать в воде на заданном горизонте и, что особенно ценно, дает возможность вести измерения в придонном слое воды. Так, например, подводный аппарат «Пайсис» имеет аппаратуру для измерения средних значений температуры, электрической проводимости, скорости звука, процентного содержания кислорода и скорости течений. Температура измеряется термометром сопротивления с точностью 0,01 °С, электрическая проводимость — контактным датчиком с платиновыми электродами с точностью в пересчете на соленость 0,01. Глубина измеряется потенциометрическим датчиком с точностью 0,25 %. Скорость звука измеряется ультразвуковым датчиком с точностью ±0,15 м/с. Две составляющие скорости течения измеряются электромагнитными датчиками с точностью ±1 % и постоянной времени 0,1 с. Содержание кислорода в воде определяется полярографическим датчиком с точностью 2 % от измеряемого диапазона.
На аппарате установлены датчики для измерения высокочастотных пульсаций температуры, электрической проводимости и скорости течения. Пульсации температуры измерялись пленочным термометром сопротивления в диапазоне ±0,5 °С со средней квадратической погрешностью 0,004 °С. Пульсации электрической проводимости измерялись гидрорезисторным датчиком в диапазоне ±0,1 См/м с погрешностью 2,7-Ю-5 См/м. Пульсации скорости течений измерялись электромагнитным датчиком в диапазоне ±25 см/с с погрешностью 0,8 мм/с.
Собираемая датчиками информация о средних и пульсацион-ных значениях параметров записывалась на магнитную ленту и затем после всплытия аппарата переписывалась в память судовой ЭВМ. На судовой ЭВМ осуществлялась затем обработка полученной информации.
Измерения гидрофизических параметров проводились в Индийском океане в различных режимах работы подводного аппарата: в режиме свободного спуска, зависания, фиксации на дне и в режиме горизонтального хода под двигателями. В процессе измерений проводилась различная ориентация пульсационных датчиков относительно аппарата.
Первым этапом обработки являлся расчет профилей температуры, электрической проводимости, содержания кислорода, плотности, солености воды, скорости звука и компонентов скоростей течения как функций глубины погружения аппарата. Профили гидрофизических параметров затем выводились на цифропечать и графопостроитель.
Полученные профили наглядно иллюстрируют особенности гидрофизических полей. Так, найденное повышение значений солености и плотности воды в придонных слоях может быть объяснено горизонтальной изменчивостью полей, поскольку измерения проводились при движении аппарата вдоль наклонного дна.
Гидрооптические исследования, выполненные подводными аппаратами, включали измерения прозрачности воды, исследование характера распространения естественного светового поля, измерения интенсивности поглощения света водой как по глубине, так и в горизонтальном направлении.
Подобные исследования длительное время велись с надводных судов, однако отсутствие хорошей стабилизации измерительных приборов существенно сказывалось на качестве получаемых результатов. Подводный аппарат, обладая способностью зависать в толще воды, обеспечивает получение достоверных характеристик в исследуемой точке.
Исследования «Дипстара» и «Алвина» показали, что естественное освещение в районе Багамских островов проникает на глубину до 700 м, а за счет меньшего рассеивания естественного освещения на глубине 180 м создает большую дальность видимости чем искусственное.
Важным направлением исследований являлось изучение физических свойств воды как среды, проводящей звук. Эти исследования включали изучение: влияния гидрологических факторов на звуковую проводимость в придонных слоях воды, акустических свойств воды в глубинных слоях течений, зависимости скорости звука от глубины и поверхностной реверберации на границе водораздела.
Комплексными исследованиями, проводимыми с борта аппаратов «Дипстар-4000» и «Архимед», было выявлено, что, хотя вблизи дна влияние температуры на скорость звука невелико, тем не менее этот эффект усиливает отражение звука вверх и способствует созданию звукового канала в придонной области. Помимо отмеченных, представляют интерес также исследования звукорассеивающих свойств льда, проводившиеся подводным аппаратом «Пайсис».
Анализ показывает, что с наибольшей эффективностью с борта подводных аппаратов могут быть проведены исследования циркуляции и переноса вод и исследования тонкой структуры физических полей в океане.
Они могут проводиться двумя методами:
— путем измерения физических параметров среды бортовой аппаратурой;
— путем измерения физических параметров среды автономными донными приборами, расставляемыми подводным аппаратом и собираемыми по окончании измерений.
Исследования физических полей океана могут включать измерения характеристик перемещения водной массы — скорости и направления течения, температуры, солености, электрической проводимости, концентрации радиоактивных веществ, гидрооптических и акустических характеристик.
При этом следует учесть, что с помощью бортовой измерительной аппаратуры подводного аппарата можно изучать пространственную неравномерность характеристик среды, короткопе-риодные временные изменения в фиксированной точке пространства (в статическом положении подводного аппарата без дрейфа).
В процессе движения подводного аппарата в горизонтальном направлении возможно изучение микроструктуры полей по горизонту. Эти измерения должны проводиться в сочетании с изучением временной структуры физических полей путем использования буйковой станции или второго подводного аппарата, находящегося в статическом режиме над грунтом без дрейфа.
Временная, особенно длиннопериодная изменчивость характеристик среды может быть изучена только с помощью донной измерительной аппаратуры.
В процессе исследований физических полей океана подводный аппарат может обеспечить измерение средних значений характеристик, их пространственной неравномерности в придонном слое, слое скачка, на сложном рельефе — временной изменчивости, пульсаций и спектров коротко- или длиннопериодных колебаний.
Измерения температуры в слое скачка следует проводить с длительностью записи до 5 мин при вертикальном движении подводного аппарата. Это позволяет зафиксировать спектр колебаний температуры с периодом от 5 до 20 с. Измерения градиента температуры в придонном слое следует проводить в точках на удалении от дна 10 см, 1 м, 2 м и т. д. приблизительно до 50 м от дна.
Вдали от гидрологических фронтов горизонтальный градиент температуры среды на глубинах 500—1000 м составляет примерно 10_2°С на милю. Следовательно, при исследовании пространственных пульсаций температуры необходимо обеспечить относительную точность измерений в несколько тысячных долей градуса. Учитывая, что вертикальный градиент температуры в не-стратифицированном слое составляет примерно 10_3°С/м, точность стабилизации положения подводного аппарата в этом случае должна быть не хуже ±1 м. Эти же требования справедливы и в случае исследования временной микроструктуры поля температуры. По мере увеличения глубины требования к точности стабилизации положения подводного аппарата должны быть повышены.
Одной из важных проблем при изучении физических полей с помощью подводного аппарата является устранение влияния физических полей, индуцированных аппаратом. Уменьшить их влияние можно выносом измерительных датчиков на специальных штангах и кронштейнах в сторону от аппарата либо измерениями на ходу, либо установкой донной измерительной аппаратуры.
Геологические исследования с использованием подводных аппаратов обычно проводились с целью визуальных наблюдений для описания микрорельефа дна и его структуры, фиксирования рельефа дна с помощью приборов; селективного отбора проб грунта и образцов пород.
Наибольшее количество работ связано с картографированием дна в различных сложных по рельефу районах океана. Съемка рельефа дна при этом оказывается детальной, так как проводится с близкого расстояния. Попутно исследуется состав, строение и физико-химические свойства дна и слагающих его пород. Основными методами наблюдений являются визуальные наблюдения дна через иллюминатор, с помощью телевизионных установок с записью изображения на видеомагнитофоны, стерео-фотографирование и киносъемка, а также локация дна гидролокаторами бокового обзора. Всесторонние визуальные исследования сопровождаются обычно селективным отбором образцов грунта, коренных пород, а также отбуриванием кернов с помощью манипуляторов и трубок.
Подводным аппаратом «Аллюминаут», например, на глубине 1200 м были собраны образцы железомарганцевых конкреций и рудные образования с повышенным содержанием меди, никеля, кобальта.
Значительный объем работ проведен подводным аппаратом «Пайсис» по геолого-морфологической программе в Красном море, Атлантическом и Тихом океанах, где отбирались многочисленные пробы грунта, образцы коренных пород, сульфидные образования. Столь же эффективно в интересах геологии использовался подводный аппарат «Аргус» в Черном и Средиземном морях и на подводном поднятии Ампер в Атлантическом океане. С помощью манипулятора были отобраны интересные пробы грунта, сделаны уникальные фотографии донной поверхности и вершины горы Ампер.
Подводным аппаратом «Краб» отбирались пробы грунта на подводных вулканических горах в Тирренском море и Тихом океане в районе Гавайских островов.
Подводным телеуправляемым аппаратом «Манта-1,5» проводились исследования в Красном море в районе окраинных гор красноморского рифта. Помимо многочисленных видеозаписей донной поверхности, были отобраны многочисленные пробы грунта, в частности были взяты ненарушенные пробы в районе многочисленных отверстий на донной поверхности. Иногда подводный аппарат оборудуется устройством для дробления коренных пород с последующим их отбором.
Особенно эффективными подводные аппараты оказались при изучении каньонов. Как выяснилось, результаты исследований каньонов с поверхности резко отличались от тех, которые были получены при непосредственном наблюдении. Так, в процессе изучения каньонов JIa-Холья и Скриппса у западного побережья США были картированы характерные особенности, которые невозможно было наблюдать косвенным методом. Удалось изучить мелкомасштабные нерегулярности в донной топографии, исследовать природу донных отложений и характер их распределения. При изучении каньонов с подводных аппаратов исследовалась стратиграфия по склонам, наблюдались и оценивались динамические процессы. Этот метод позволил изучить динамику течений и потоков осадков по дну каньона.
Систематические исследования каньонов Черного моря были проведены подводным аппаратом «Аргус».
Особый интерес и вместе с тем трудность представляют исследования глубоководных желобов в океане. Они проводились самыми глубоководными аппаратами «Триест» и «Архимед».
Исключительный интерес и важность представляют исследования рифтовых зон Атлантического и Тихого океанов, Красного моря и озера Байкал, проведенные подводными аппаратами. В этих программах использовались все типы подводных аппаратов: обитаемые, буксируемые, телеуправляемые с манипулятором.
Так, в программе «Фамоус» использовались аппараты «Глория», «Сиана», «Архимед», которыми было проведено детальное изучение срединно-океанического хребта в Атлантическом океане.
В программе «Пикар» использовались аппараты «Звук», «Манта» «Пайсис», которыми всесторонне исследовался красно-морский рифт. В процессе этих исследований был получен огромный фактический материал в виде образцов базальтов, фотографий, видеозаписей.
Подводными аппаратами проводились также исследования плато (плато Блейк, например), которые имели целью поиск залеганий марганца и фосфора, изучение впадин с целью выяснения их происхождения, определение природы рифоподобных валов на внешних кромках шельфа.
Особую эффективность в проведении геофизических исследований показали подводные буксируемые аппараты. Перемещаясь в непосредственной близости от дна, буксируемый аппарат с помощью акустического профилографа способен исследовать структуру дна на глубину первых десятков метров. При этом профилирование может длиться довольно длительное время.
Подобные исследования были проведены подводным аппаратом «Звук» в Красном море, в районе о. Кипр в Средиземном море, в Атлантическом океане в районе о. Куба и подводного поднятия Ампер.
В последние годы проводятся широкие геологические исследования с целью разведки донных месторождений нефти, газа, в которых, в частности в Индийском океане, принял участие подводный аппарат «Пайсис».
Направленность геофизических исследований сравнительно постоянна на протяжении всего периода использования подводных аппаратов в научных целях.
Они были сосредоточены на:
— профилировании микроструктуры дна акустическими методами;
— измерении магнитного поля и местных его аномалий;
— измерении гравитационного поля и местных его аномалий;
— изучении закономерности затухания акустических сигналов в донных отложениях;
— изучении уровня реверберации у дна.
Последние два направления преследуют цель разработки акустической модели дна на основе сопоставления данных о топографии грунта с измерениями отражения, рассеяния и ослабления звука.
Перечисленные исследования не могут быть проведены с требуемой точностью с надводного судна. Способность подводных аппаратов к точной стабилизации положения или траектории движения позволяет получить и исключительно точные результаты. Подводный аппарат может быть также использован для точной установки на дне ряда геофизических приборов. Так, например, подводным аппаратом «Аллюминаут» было расставлено десять донных станций, предназначенных для измерения гравитационного поля.
Уникальные работы проводились аппаратом «Дипквест» по изучению твердости и состава грунта, которые выполнялись с помощью специального бура.
Подводный аппарат «Бен Франклин» исследовал профиль осадочной толщи с проникновением до 100 м, удерживаясь от дна на расстоянии 10 м.
При изучении закономерностей затухания акустического сигнала в донных осадках подводным аппаратом «Дистар-4000» в грунт на глубину до 60 см внедрялась штанга с датчиком. Такая операция возможна только с участием подводного аппарата. Им же определялись зависимости реверберации от частоты и других характеристик передаваемых сигналов, а также от влияния дна, поверхности моря и звукорассеивающих слоев.
Приведенный обзор позволяет выделить основные перспективные методы проведения исследований с использованием подводных аппаратов.
Это визуальные наблюдения, фото- и киносъемка, измерения характеристик с помощью специальной аппаратуры, отбор проб грунта с помощью манипуляторов, грунтовых трубок и керноотборников. Исследования могут проводиться путем систематических наблюдений и измерений в заранее выбранных точках, а также путем свободного поиска интересных районов с последующим выполнением на них детальных исследований.
Систематические наблюдения могут проводиться, например, по прямой от берега по свалу в пределах рабочей глубины подводного аппарата. Этот метод прокладки трассы удобен для буксируемых аппаратов. Для обитаемых аппаратов удобно двигаться по трассе, начиная с больших глубин. При этом с целью получения точного профиля глубину необходимо регистрировать с максимально возможной точностью. На опорных площадках, расположенных, например, через определенные интервалы глубин, требуется проводить отбор проб грунта: осадочного — в виде колонки диаметром 60—80 мм и длиной от 40 до 100 см и основных пород в виде образца массой 2—3 кг. Желательное число проб вдоль профиля — до 50. При работе на опорных площадках необходимы предварительные фотографирование и зондирование грунта бортовым сейсмопрофилографом. В этом режиме исследований важное значение имеет точность навигации подводного аппарата. Желательная точность определения истинного положения подводного аппарата по горизонтали обычно составляет 10—-20 м.
Свободный поиск интересных районов исследования может проводиться с целью обнаружения и всестороннего исследования особенностей рельефа, структуры грунта, физико-химических его особенностей всеми имеющимися средствами. Такими районами могут быть каньоны, выходы гидротермальных вод, нефтегазоносные структуры и т. п.
В качестве конкретных исследований по геолого-геофизической проблематике могут быть названы следующие:
а) исследования осадочных пород;
— изучение микрорельефа осадочного слоя путем картирования;
— изучение взвешенного вещества в воде путем отбора проб;
— исследование формирования минеральных комплексов в донных осадках путем отбора проб;
— изучение состава и закономерностей распределения в донных осадках микрофлоры и микрофауны путем фотографирования и отбора проб;
— изучение динамики переноса осадочных пород путем расстановки реперов с шагом до 5 м;
— изучение физико-химических характеристик осадочных пород путем отбора проб;
— изучение микроструктуры осадочного слоя путем отбора проб;
— изучение прочности и скорости сдвига осадочного слоя путем измерений;
— исследование стратификации придонного слоя акустическим методом;
— измерение температурного градиента грунта автономными приборами;
б) исследование рифтовых зон:
— изучение структуры рифтовых зон путем наблюдений и фотографирования;
— обследование обнажений коренных пород путем наблюдений, фотографирования и взятия проб;
— изучение структурных закономерностей выходов коренных пород путем наблюдений и фотографирования;
— изучение рудоносных образований в рифтовых зонах путем наблюдений и отбора проб;
— разведка источников пресных и гидротермальных вод;
— исследование гидротермальных активностей в рифтовых зонах путем измерений и отбора проб;
— исследование тонкой структуры геофизических полей в рифтовых зонах путем измерений;
— магнитотеллурические зондирования;
— изучение структуры коренных пород путем отбора проб и отбуривания кернов;
в) геофизические измерения при картировании дна:
— получение тонкой структуры дна;
— гидролокационная съемка дна;
— точные измерения гравитации;
— гравиметрические опорные измерения на стоянке;
— точные магнитометрические измерения;
— исследования распространения звука в грунте путем измерений;
— акустическое зондирование дна.
Перечисленные исследования могут выполняться всеми типами подводных аппаратов. Однако наибольшее число задач выпадает на долю подводных аппаратов с манипуляторами, позволяющими как производить целевой координированный отбор воды и грунта, так и осуществлять монтаж и демонтаж донных измерительных комплексов.
Гидрохимические исследования, выполнявшиеся с использованием подводных аппаратов, имели одну преимущественную направленность. Они были концентрированы на исследовании свойств воды и осадков на границе их раздела.
Эти исследования предполагали:
— взятие проб воды в придонном слое специальными батометрами, а также взятие проб взвеси осадков;
— взятие пррб осадков грунтовыми трубками, закрывающимися герметично;
— измерение температуры в придонных слоях воды и в осадочном слое грунта с помощью термисторных датчиков температуры;
— определение рН в осадках на глубине до 1 м.
Из перечня операций становится очевидным, что они не могут быть успешно выполнены с надводных судов ввиду трудности координатной привязки положения приборов относительно дна.
Помимо перечисленного специального оборудования, подводный аппарат должен иметь многофункциональный манипулятор, который обеспечит точную установку датчиков температуры на поверхности дна и в глубине грунта, а также взятие проб воды в придонном слое. Комплексные исследования взвеси осадков в придонном слое проводились подводным аппаратом «Куросио» (Япония). Брались пробы взвесей специальными батометрами на различных расстояних от дна. Отбор проб сопровождался измерением гидрологических и гидрооптических характеристик, а в самих пробах выделялись органические и неорганические компоненты.
Гидрохимические исследования могут проводиться также путем измерения и регистрации параметров in situ с помощью бортовой аппаратуры или отдельных измерительных комплексов.
Гидробиологические исследования с использованием подводных аппаратов обычно проводились с целью визуальных и приборных исследований для описания зоны и характера распределения бентосных форм, изучения и селективного отбора проб планктона и бентоса, изучения биологических шумов. Подобно геологическим, эти исследования проводились преимущественно методом визуальных наблюдений через иллюминаторы, с помощью телевизионных установок с регистрацией на видеомагнитофон, стереофотографированием и киносъемкой.
В гидробиологических исследованиях основное участие принимали подводные аппараты «Дипстар-4000», «Аллюминаут», «Пайсис», «Бен Франклин», «Кобмарин», «Аргус», «Манта-1,5», «Звук-4м». «Дипстаром», например, проводилась киносьемка пелагических и донных организмов. Аппаратом «Бен Франклин» изучалось поведение морских звезд на дне. По результатам наблюдений была составлена карта их перемещения во времени. С по-мощью подводного телеуправляемого аппарата «Краб» были собраны с вершин подводных вулканических гор в Средиземном море образцы растений и донных животных. Весьма интересный комплекс биологических наблюдений был выполнен с помощью буксируемого телеуправляемого аппарата «РУФАС» (США). Исследовался рифовый район вдоль побережья Флориды с целью изучения как строения рифа, так и распределения в этом районе моллюсков, морских черепах и крабов. Была составлена подробная карта распределения этих животных, а также получено большое количество цветных фотографий на станциях. Одна из модификаций подводного телеуправляемого аппарата «КЭРВ» была приспособлена для сбора образцов донных живых организмов. В работах подводных аппаратов «Кобмарин» и «Аллюминаут» изучалась популяция моллюсков, офиур, морских звезд.
В процессе дрейфа подводного аппарата «Бен Франклин» проводилось изучение интенсивности обрастания морскими организмами корпуса подводного аппарата, иллюминаторов и датчиков приборов, а также велся поиск звукорассеивающих слоев микроорганизмов.
Важное значение имеют исследования зон распределения планктона. Эти исследования проводились подводным аппаратом «Синкай», при этом велся отлов планктона при горизонтальном и вертикальном движении аппарата. Исследования планктона и сероводородной зоны Черного моря проводились подводным аппаратом «Аргус».
В Красном море подводными телеуправляемыми аппаратами «Манта-1,5» и «Звук-4м» проводились исследования характера поведения донных рыб.
Крупным научным направлением исследований с применением подводных аппаратов является изучение природы звукорассеивающих слоев. С этой целью производится:
— изучение глубоководных рассеивающих слоев акустическими методами, в частности изучение зависимости свойств рассеивающего слоя от частоты звуковых колебаний;
— изучение акустических характеристик обитателей глубоководных рассеивающих слоев, в частности определение ревербе-рационной громкости отдельных рассеивателей;
— изучение биологического строения глубинных рассеивающих слоев путем анализа количественной информации о физических параметрах проб, имеющих отношение к распределению звука.
Многочисленные работы были проведены по записи и изучению естественного биологического шума моря. В связи с тем, что собственные шумы подводного аппарата оказываются крайне незначительными и может быть установлен режим полной тишины, эти исследования были проведены с большим эффектом. Они выполнялись в основном подводными аппаратами «Пайсис» и «Бен Франклин».
Исследования в интересах рыбного хозяйства, имеющие важное практическое значение, тесно переплетаются с гидробиологическими и в то же время они имеют свою чисто хозяйственную направленность. Наиболее интенсивно они проводились в СССР и Японии.
Для измерения глубины использовалось обычно бурение льда с последующим взрывом, а затем промер глубины лотом. Применялось акустическое зондирование через лед и воду с вертолетов. Однако все эти методы дают частную батиметрическую картину и не обеспечивают получение непрерывных профилей. С поставленной задачей может справиться, очевидно, полностью автономная и автоматическая система, движущаяся по программе подо льдом.
Детальное фотографирование отдельных участков дна океана, особенно отличающихся сложным рельефом, также под силу либо обитаемому, либо необитаемому автономному аппарату. При этом для выполнения рутинной работы следует использовать необитаемый аппарат, что существенно снижает стоимость исследований. На ровных участках дна может успешно действовать подводный автономный робот с программным управлением. На сложных по рельефу участках дна с детальной фотосъемкой способен справиться подводный робот, обладающий свойством приспосабливаться к изменяющемуся рельефу дна. Для выполнения ряда операций используются телеуправляемые аппараты, содержащие в своей структуре робототехнические системы.
Существующие и создаваемые подводные роботы могут быть разделены на две группы: автоматические и интерактивные.
Первая группа подводных роботов — полностью автоматическая система. Человек-оператор вводит задание на работу и наблюдает за ее исполнением, не участвуя непосредственно в процессе управления роботом. Существуют три разновидности автоматических роботов: программные, адаптивные и интегральные. В программных подводных роботах управление осуществляется по жесткой программе. Успешное их действие возможно лишь в детерминированной обстановке. Адаптивные подводные роботы обладают способностью приспосабливаться к окружающей среде. Это их свойство обеспечивается прежде всего развитой системой датчиков, воспринимающих внешнюю среду. Такие подводные роботы способны действовать в недетерминированной обстановке. Интегральные подводные роботы обладают элементами искусственного интеллекта. Они собирают обширную информацию об окружающей среде и на ее основе моделируют и распознают обстановку, а затем принимают самостоятельное решение в соответствии с заданной генеральной (стратегической) программой действий и с учетом накопленного роботом предыдущего опыта. Интегральные роботы способны действовать в меняющихся условиях.
Вторая группа подводных роботов — интерактивные — характеризуется активным взаимодействием человека-оператора с роботом в процессе выполнения им операций. При этом значительная часть действий выполняется роботом в автоматическом режиме. Различают две разновидности интерактивных подводных роботов: с супервизорным управлением и с комбинированным управлением. Подводные роботы с супервизорным управлением обладают способностью автоматически выполнять отдельные операции, программа которых хранится в памяти робота. Человек-оператор определяет конечное задание или цель функционирования робота на тактическом уровне, а эта цель достигается роботом самостоятельно, путем выбора последовательности программы на основании контактов с окружающей средой. Следует заметить, что супервизорное управление может предусматривать как программный, так и адаптивный тип действий подводного робота. От этого будет зависеть форма задания: цель и сложность отдельных программ. Подводные роботы с комбинированным управлением предполагают вмешательство в процесс выполнения работ оператора, действующего в режиме прямого управления (например, копирующего с заданием обобщенных координат или вектора скорости, или вектора усилия). Обычно прямое участие оператора в процессе управления диктуется необходимостью выполнить работу с наибольшей надежностью в связи с усложнением внешней обстановки.
Характерной чертой робота, в отличие от обычных, даже очень сложных автоматических систем, является наличие в его структуре собственной «памяти», которая и дает возможность роботу действовать в определенной степени самостоятельно и «разумно». Однако одной только памяти для самостоятельных и разумных действий роботу было бы недостаточно. Роботу необходимо воспринимать окружающий его мир. Этого можно достичь, если наделить подводный робот органами чувств: зрением, осязанием, ощущением давления, скорости и направления течения и т. д. «Чувствуя» окружающую среду и перерабатывая эту информацию специальным вычислительным устройством, подводный робот оказывается способным создать своеобразное отражение этой среды в своей памяти. Такое искусственно созданное представление принято называть «внутренней картиной внешнего мира».
Рассмотренная система супервизорного управления является первым шагом на пути создания роботов второго поколения. В ней мы находим лишь элементы адаптации, а самостоятельность робота оказывается крайне ограниченной. И тем не менее даже такая система резко повышает эффективность выполнения операции в сложных условиях под водой на больших глубинах.
Многочисленные исследования посвящены проблеме распознавания образов на основе информации от визуального и тактильного сенсора. Такая комбинация позволяет получить максимальную информацию об исследуемом объекте. Видимый образ может быть недостаточным для принятия решения. Например, образец породы, лежащий на дне, может быть частично заилен или затенен неровностями дна. В этом случае путем тактильного исследования невидимых частей образца с помощью манипулятора, обработки этой информации ЭВМ, на телевизионном экране воссоздается невидимая часть образца. При таком синтезе визуального образа облегчается задача принятия человеком правильного решения.
По мере развития исследований становится все более очевидным, что подобные проблемные вопросы, являясь сами по себе частными, на самом деле существенно меняют внешние, конечные характеристики подводного робота. Поэтому их успешное решение в значительной степени определяет прогресс этого нового вида подводной техники исследования океана.
Отражение действительности необходимо роботу как опора для существования в этой среде и адаптации — приспособления к ней. Попадая в новые условия и воспринимая их своими органами чувств — сенсорами, подводный робот постоянно корректирует свое представление о внешнем мире. Этот-то процесс и обеспечивает его адаптацию к среде.
Подводный робот имеет сложную — многоуровневую — структуру. Самый низший уровень — это исполнительные системы: манипуляторы, движители для передвижения в воде, шагающие механизмы для передвижения по дну. К этому же уровню относятся и все другие механизмы, которые реализуют конечные действия. Они — только исполнители. Команды о том, что и как делать, им задаются более высоким уровнем — тактическим. На этом уровне ведутся вычисления, каким приводом, какое время необходимо работать, какова последовательность работы приводов и т. п. Тактический уровень, таким образом, определяет разумную и рациональную траекторию перемещения самого робота или манипулятора в точку указанной цели.
Наконец, подводный робот может иметь еще более высокий — стратегический — уровень управления. На этом уровне решаются глобальные задачи. Например, на стратегическом уровне может быть сформулирована задача «исследовать данный район с целью поиска геотермальных выходов, взятия в этих местах проб воды (измерения ее температуры и солености)». Это задача глобальная. Она определяет только конечную цель, а как ее достичь— должно решаться на тактическом уровне. Сама же операция измерения температуры, солености и отбора проб осуществляется низшим исполнительным уровнем.
Предложен ряд критериев деления роботов по поколениям, подобно тому, как это делается по отношению к электронно-вычислительным машинам. На наш взгляд, определяющим в иерархии роботов является уровень языка, на котором человек общается с роботом. Поэтому к первому поколению роботов относят системы, с которыми человек общается на низшем исполнительном уровне. Это, как правило, системы с программным управлением, где команды и их последовательность жестко заданы человеком заранее.
Язык общения человека с таким роботом —это язык декартовых координат, которыми задаются конкретные точки — цели следования робота в каждый отдельный момент времени.
Подводные роботы первого поколения успешно действуют под водой, проводя научные океанологические исследования. Так, в США для этих целей используются подводные роботы «Си Дрон», «СПУРВ», «Пингвин», в СССР — робот-автомат «Скат», созданный в Дальневосточном научном центре АН СССР. В их задачу входит движение по определенной заданной траектории, измерение на этой траектории в определенное заданное время параметров среды: температуры, давления, солености, скорости и направления течения и т. д. В некоторых системах предусмотрена посадка робота в определенных точках траектории на дно и измерение всех перечисленных параметров в неподвижном состоянии. Важно помнить, что вся последовательность действий, весь сценарий поведения такого робота заранее определен и расписан по шагам. Конечно, такой робот не обладает ни малейшими способностями к «творчеству», хотя и действует самостоятельно.
В последние годы интенсивно ведутся исследования с целью создания подводных роботов второго поколения. К ним относятся системы, общение человека с которыми происходит на тактическом уровне на языке типовых команд [20]. Под типовой командой подразумевается команда, в результате которой совершается определенное характерное движение робота, которое относится к разряду элементарных операций. Очевидно, сколь бы ни была сложна конечная операция, которую должен выполнить робот автономно, она может быть разбита на последовательность элементарных операций, задаваемых типовыми командами. Если же иметь достаточно полный набор таких типовых команд, можно, по-видимому, будет составить из них сколь угодно сложную цепочку команд, которая приведет к выполнению конечных операций. В таком виде типовые команды становятся своеобразными операторами языка. С помощью такого языка человек способен строить командные фразы. Вся, однако, сложность состоит в правильном выборе типовых команд. Прежде всего они должны быть универсальными. Они должны быть пригодны для многократного использования в различных ситуациях. Команды должны определять только цель и не должны содержать информации о путях и способах достижения этой цели. Наконец, типовые команды не должны быть слишком элементарными, так как в этом случае фраза окажется слишком длинной. В то же время они не должны быть и сложными, так как это существенно затруднит их выполнение.
Примером типовой программы подводного робота второго поколения может быть следующая: «роботу переместиться в точку с координатами Л“, Y, Z», «роботу занять пространственное положение с углом крена 30° и углом дифферента 10° и т. д.
В настоящее время создан ряд языков, которые относятся к разряду проблемно-ориентировочных. Так, например, одним из первых был создан манипуляторно-ориентированный язык — сокращенно МАНТРАН. Далее появился язык управления роботов, сокращенно ЯДРО. Эти языки позволяют осуществлять прямое общение человека как с носителем робота, так и с манипулятором, установленном на нем.
Структурно робот второго поколения представляет собой комплекс систем, объединенных одной целью поведения. Ни одна из систем робота не действует самостоятельно и бесконтрольно, а подчинена общей стратегии, заданной оператором или часто-выработанной в результате общения с внешним миром.
Робот второго поколения состоит из:
— носителя, обеспечивающего его точное перемещение в пространстве;
— исполнительной системы — органов активного общения с внешней средой;
— сенсорной системы общения с внешней средой;
— вычислительно-управляющей системы;
— системы общения с оператором.
Одной из главных оказывается вычислительно-управляющая система. В ее функции входит:
— хранение в памяти и регулярная корректировка модели внешней среды и внутреннего состояния робота;
— обработка поступающей из сенсорной системы информации в соответствии с заданной операторов подцели;
— использование результатов анализа информации об окружающей среде для формирования управляющих сигналов в исполнительную систему на основании модели внешней среды, внутреннего состояния робота и заданной подцели;
— рациональное кодирование информации для ее передачи по каналу связи;
— управление работой канала связи.
В управляющем информационном комплексе существуют два уровня обработки информации. На верхнем уровне обработка ведется центральным вычислительным устройством. На нижнем уровне обработка информации ведется с помощью специализированных устройств обработки и промежуточного хранения данных. Эти устройства являются промежуточными между сенсорной системой и центральным вычислительным устройством — препроцессором, а также между центральным вычислительным устройством и сенсорной системой — постпроцессором.
В функции центрального вычислительного устройства входит:
— анализ непротиворечивости и возможности исполнения команд, поступавших от оператора;
— анализ команд на стратегическом и тактическом уровнях;
— выдача команд тактического уровня управления на постпроцессоры;
— периодический опрос буферной памяти каждого препроцессора и постпроцессора;
— обработка на высшем уровне информации от сенсорной системы;
— хранение и коррекция математической модели внешней среды.
Функции препроцессора заключаются:
— в предварительной обработке данных, поступивших от сенсорной системы;
— в управлении постпроцессорами исполнительных органов;
— в хранении в буферной памяти полученной в результате предварительной обработки информации.
Наконец, функции постпроцессора состоят:
— в расшифровке поступающих из центрального вычислительного устройства команд тактического уровня;
— в непосредственном управлении исполнительными приводами;
— в контроле за обработкой команд по сигналам от датчиков внутренних обратных связей;
— в хранении в буферной памяти информации, полученной в результате контроля отработки команд.
Из ранее перечисленных признаков робота второго поколения определяющим является признак иерархичности структуры управления. В связи с этим еще раз отметим существенные характеристики, отличающие иерархичную структуру робота.
Это прежде всего:
— последовательное вертикальное расположение систем;
— приоритет действий систем верхнего уровня;
— зависимость действий систем верхнего уровня от исполнения нижними уровнями предписанных задач.
Принимая эти три признака в качестве основных законов построения структуры робота второго поколения, рассмотрим хотя бы схематично возможные процессы принятия роботом решений. В этой связи следует отметить, что практически в любой реальной ситуации в процессе принятия решения всегда возникает дилемма:
— необходимо действовать возможно быстрее;
— необходимо прежде, чем действовать, возможно лучше понять внешнюю обстановку.
Подобная дилемма, особенно в сложных ситуациях, может быть сколько-нибудь удачно разрешена, по-видимому, лишь при иерархическом подходе к проблеме. С этой целью необходимо установить последовательность и взаимосвязь подпроблем, слагающих основную проблему. В самом деле, деление на подзадачи позволяет, с одной стороны, добраться до самой простой и решаемой подзадачи, а с другой, путем последовательного решения определить начальные условия следующих подзадач и, таким образом, двигаться от частного к общему. Таким путем строится иерархия слоев принятия решений. Следует отметить, что функциональная иерархия принятия решения в условиях полной неопределенности характеризуется тремя последовательными и взаимосвязанными процессами:
— выбором стратегии, на основании которой совершается процесс решения поставленной задачи;
— уменьшением неопределенности путем соответствующего обучения и адаптации к внешней обстановке;
— поиском предпочтительной схемы действий путем выбора желаемых законов и стратегии, которые используются далее нижними уровнями. Процесс выбора строится на основе анализа внешней обстановки. В этот период вычислительно-управляющая система обрабатывает весь массив данных, поступающих от сенсорной системы робота.
Так, например, подводный робот с супервизорным управлением перед движением к цели, которую он получил от оператора в виде лаконичного задания ее координат, анализирует внешнюю обстановку: свое положение относительно цели, рельеф местности на пути движения к цели. Далее на этом же этапе действий робот должен выбрать траекторию своего движения, выбрать, какие движители и по какому закону должны работать, чтобы цель была достигнута, например, за кратчайшее время. Эти решения робот может принять только после уточнения и конкретизации множества неопределенностей, которое происходит на втором этапе — этапе обучения и адаптации. Первый и второй этапы оказываются тесно взаимосвязанными как функционально, так и во времени.
Наконец, третий этап также органически связан с двумя первыми, поскольку на нем непосредственно реализуется траектория движения подводного робота к указанной точке дна.
Одним из важных оказывается процесс анализа роботом внешней обстановки — анализа получаемой информации. Этот процесс тесно связан с распознаванием пространственных образцов. В большинстве предлагавшихся методик машинного распознавания пространственных образов, полученных, например, с помощью телевизионной системы, данные о распознавании яркости отдельных участков изображения предварительно обрабатывались на ЭВМ для получения контурного рисунка. Последний затем анализировался с целью распознавания. Подобный метод требует громадной памяти ЭВМ и в реальных условиях вряд ли может быть использован. .
Существует иная процедура распознавания, основанная на методе ортогональных сечений анализируемого пространства сканирующим лучом. Метод позволяет получить и зафиксировать профили сечений, которые после обработки на ЭВМ дают возможность получить описание объекта, ограниченного плоскостями.
Представим себе, что робот решает самую первую задачу — стремится понять (анализировать) местность, на которой он находится. Прежде чем перейти к активным действиям на дне, робот должен получить и проанализировать информацию о внешней среде и прежде всего о рельефе дна в зоне его работы. Данные о рельефе, полученные, например, с помощью гидролокатора кругового обзора, могут быть обработаны по соответствующей методике. При этом в память ЭВМ вводится не вся информация о сечении рельефа лучом локатора, а лишь координаты тех точек, в которых производная функция, описывающая профили указанного сечения дна, равна нулю. Совокупность таких точек, соответствует различным, отстоящим на один и тот же угол друг от друга сечениям рельефа дна плоскостью луча гидролокатора, представляет собой характеристику изучаемого участка дна.
Вполне очевидно, что точность воссоздания рельефа в памяти ЭВМ будет зависеть от частоты (шага) сечения. Алгоритм должен предусматривать возможность изменения шага сканирования в зависимости от угла наклона в пространстве вычисляемых отрезков прямой, соединяющих точки перегиба соседних сечений. Эта процедура позволит дифференцированно исследовать различные по рельефу участки донной поверхности.
Полученная и обработанная информация об изменениях профиля донной поверхности может быть передана по гидроакустическому каналу на судно, где графопостроитель воспроизведет полученный роботом рельеф дна, а оператор сможет выбрать интересующий его участок — цель и направить к нему робота.
Первым шагом в создании подводных роботов второго поколения стала разработка системы супервизорного управления. В такой системе оператор осуществляет общий контроль и надзор за поведением системы, которой позволено действовать самостоятельно в определенных рамках. Контроль за работой ведется с помощью телевизионной системы, которая обозревает рабочее пространство. Функции человека сводятся к восприятию обстановки, ее пониманию и принятию решения. Когда решение принято, человек-супервизор дает лаконичную команду, указывая Цель, но не определяя конкретно, каким образом следует ее достигнуть. Такая система супервизорного управления для подводного робота второго поколения создана в Институте океанологии АН СССР. Подводный робот имеет средства активного движения в воде — управляемые винтовые движители, телевизионную систему, манипулятор с очувственным захватом и небольшой вычислительный блок — микропроцессор. Когда робот достигает дна и на экране телевизионного приемника, находящегося на научно-исследовательском судне, появляется изображение дна с лежащим на нем, например, образцом породы, который необходимо взять, оператор задает роботу эту цель. Цель может быть задана различными способами. Оператор, например, может информировать подводного робота о положении цели заданием координат в цифровой форме. Однако большую оперативность имеет способ задания цели световым пером. Световое перо представляет собой приемник света в корпусе, внешне напоминающем авторучку. В качестве приемника света используется фотоэлектронный умножитель. Для увеличения разрешающей способности перед приемником света устанавливается оптическая линза. Положение точки на экране видеоконтрольного устройства определяется в вертикальном направлении числом строк разложения телевизионного изображения, а в горизонтальном — числом импульсов со специального генератора импульсов. В момент прохождения развертывающего электронного луча телевизионной трубки через точку, отмеченную световым пером, последним выдается импульсный сигнал. Следовательно, прикасаясь световым пером к экрану в том месте, где находится цель, оператор тем самым вводит в ЭВМ три параметра, используя которые машина вычисляет положение цели в системе координат реального пространства, связанной с самим роботом.
Двумя параметрами цели определяется ее положение на фотокатоде телевизионной передающей трубки. Третьим параметром цели, определяющим расстояние от нее до фотокатода, может служить либо параллакс (в случае использования стереоскопического телевидения), либо смещение объектива, обеспечивающее наибольшую четкость изображения (в случае использования моноскопического телевидения). Следовательно, чтобы определить координаты цели, ЭВМ должна произвести расчет по этим трем заданным параметрам. Вычислив координаты, ЭВМ формирует последовательность работы приводов манипулятора, которая обеспечивает его выход к цели.
Как бы точно не стремился оператор показать цель на экране, все же точность задания недостаточна. Поэтому после завершения программы «выход к цели» начинает действовать программа «поиска цели». Поиск ведется путем сканирования захватом обследуемой области: касание поверхности дна, подъем на 100 мм, перемещение в сторону на 100 мм, новое касание дна и т. д. Так как захват очувствлен специальными тактильными датчиками (датчиками прикосновения) — момент контакта с целью или неровностью дна становится зафиксированным в ЭВМ. Следующим шагом является исследование препятствия на подвижность — манипулятор пытается сдвинуть препятствие. Если это удается, то далее путем касания тактильными датчиками определяются размер и форма цели. Если по размеру цель может быть взята захватом, происходит его раскрытие. Предусмотрены многократные попытки взятия образца при различных положениях захвата.
Роль оператора в процессе всего сценария ограничивается простым наблюдением. Однако, если роботу не удается завершить операцию, человек-супервизор может отключить робота и попытаться выполнить ее, управляя манипулятором с помощью дистанционной системы.
Следует, однако, заметить, что в реальных условиях под водой начиная с первого касания захватом дна резко ухудшается видимость в воде из-за взмучивания осадков. Поэтому возможность прямого вмешательства оператора в процесс выполнения операциии мало реальна. Приходится надеяться в основном только на «способности» подводного робота.
Одна из первых разработок автономного подводного робота была предназначена для детального фотографирования донной поверхности с малопересеченным рельефом. Робот имел жесткую программу движения и успешно действовал, принося большое количество уникальной информации. С усложнением рельефа дна появляется необходимость адаптироваться к рельефу и, следовательно, получать избыточную информацию. Адаптивный подводный фоторобот должен иметь развитую сенсорную систему.
Функционирование такого фоторобота в толще воды и у дна структурно может быть представлено последовательностью программ. Учитывая, что поведение фоторобота характеризуется прежде всего адаптивностью, сами программы и их смена также должны быть адаптивными.
При движении в толще воды и последующем функционировании у дна, а также последующем всплытии фоторобот должен непрерывно адаптироваться к изменяющимся параметрам внешней среды, обеспечивая себе необходимую собственную плавучесть.
При построении (планировании) галсов, обеспечивающих максимальное покрытие (экспонирование) дна, фоторобот должен адаптироваться к ряду факторов. Прежде всего он должен адаптироваться к рельефу дна. Он должен так корректировать траекторию движения и скорость, чтобы обеспечивать максимальное покрытие площади дна фотокадрами. При этом ясно, что галсы могут быть далеко не всегда строго прямолинейными: расстояние между галсами может то уменьшаться, то увеличиваться в зависимости от изменения рельефа дна. Одновременно с этим в вертикальной плоскости траектория галсов должна максимально повторять профиль дна под курсовой линией фоторобота.
Информация об изменении рельефа дна дается вперед и вниз направленными эхолотами, а также локатором бокового обзора (ЛБО). Вместо ЛБО может быть боковой эхолот, установленный с обеих сторон фоторобота. По-видимому, эхолот сможет удовлетворить потребность робота в информации о рельефе дна. Обработка этой информации существенно проще, чем информации ЛБО.
Рассмотрим последовательность анализа информации от эхолотов. Вперед направленный эхолот дает информацию об изменении рельефа дна и препятствиях, возникающих по курсу движения фоторобота. Дальность его действия должна быть порядка 40—50 м. Получив информацию об изменении рельефа дна, робот вычисляет расстояние до него и путем кратковременного сканирования в вертикальной и горизонтальной плоскостях оценивает его размеры. Здесь возможны варианты. Если препятствие можно обойти сбоку и это допустимо программой, то робот готовит, рассчитывает изменение траектории своего движения, отклоняя ее вправо или влево. Если препятствие по курсу не имеет разрыва, то робот планирует траекторию обхода (отслеживание) препятствия сверху. Если роботу требуется пройти между двумя грядами, то он должен оценить ширину входа, и, если она равна или больше 3В (В —ширина робота), то вход возможен. После входа между грядами контроль ширины ведется- как вперед направленным, так и боковыми эхолотами.
В процессе движения над дном фоторобот получает информацию о расстоянии до дна и контролирует изменение рельефа по курсу следования. Вперед направленный эхолот дает упреждающий сигнал об изменении рельефа дна. Этот сигнал является началом планирования изменения траектории. По этому сигналу фоторобот рассчитывает момент начала изменения траектории движения, учитывая свою скорость, расстояние до точек перегиба в рельефе и крутизну изменения рельефа. При этом рассчитывается минимальное расстояние сближения, начиная с которого траектория будет изменяться. Чем круче меняется рельеф, тем больше должно быть безопасное расстояние до дна. При этом необходимо снизить и скорость движения робота.
Итак, функции эхолотов вниз и вперед оказываются разделенными. Эхолот вниз служит для удержания фоторобота на заданном расстоянии от дна. Это расстояние выбирается в зависимости от характеристик фотосистемы, прозрачности воды, рельефа дна и его контрастности. Частота фотоснимков дна должна зависеть от скорости движения робота и расстояния до дна. Скорость же движения должна зависеть от рельефа дна. Все эти параметры должны непрерывно сопоставляться, учитывая, что существует минимально возможный интервал между снимками.
Исходя из этих соображений, формируются траектории галсов и ее расстояние от предыдущего галса. Пользуясь этими признаками, оказывается возможным анализировать рельеф дна и принимать решение о планировании дальнейшей траектории движения.
Итак, при движении над дном фоторобот должен анализировать характер дна по признакам. Основным признаком является наклон участка дна. Для определения этого признака необходимо иметь информацию о расстоянии четырех точек робота от поверхности дна. Очевидно, наиболее целесообразно иметь акустические дальномеры с острой диаграммой направленности. Для обеспечения точной информации без сбоев и ошибок такие дальномеры должны работать на высоких частотах порядка 400—500 кГц. При этом частоты у всех четырех дальномеров должны быть достаточно разнесены. Это исключит сбои и ошибки при зондировании поверхности дна. Антенны следует располагать с наклоном оси, чтобы обеспечить лучшие условия измерения наклона поверхности дна.
Адаптация фоторобота к прозрачности воды состоит в выборе расстояния от фотосистемы до дна, которое обеспечивает удовлетворительную видимость. Оценка качества изображения фотографируемого участка дна может быть осуществлена также по значению контраста изображения. Робот должен иметь прозрач-номер, который постоянно дает значение прозрачности воды в данной точке. Предположительное мнение о качестве изображения. может быть получено по прозрачности и расстоянию до дна.
Такое же предположительное мнение о контрастности может быть получено как на основании прозрачности и расстоянии до дна, так и по сведениям о характере грунта в данном районе. Информация о характере грунта вводится в робот заранее перед его спуском на воду вместе с рядом других предварительных и достаточно общих сведений о районе работ.
В эти сведения должны входить:
— размер района работ;
— точка постановки донных акустических маяков;
— характер дна;
— пределы изменения глубин.
При фотографировании дна должен проводиться параллельно анализ качества изображения. Такой анализ можно выполнить с помощью телевизионной системы. В момент вспышки импульсного осветителя изображение дна запоминается на фотокатоде телевизионной трубки. Далее путем считывания выясняются потенциалы в различных точках кадра. Суждение о качестве изображения, т. е. значение контраста, возникает путем сравнения полученной разности потенциалов с некоторой предельной пороговой.
Если получаемое значение контраста ниже порогового, должна быть проведена коррекция расстояния до дна.
Очевидно, должно быть задано не только нижнее пороговое значение, определяющее максимальное расстояние фоторобота от дна, но и верхнее пороговое значение контраста, определяющее минимальное расстояние фоторобота до дна. В этом случае фоторобот движется в коридоре, обеспечивающем необходимое качество получаемых фотографий и оптимальную площадь съемки.
Помимо неконтактных сенсоров в виде различных локаторов и оптических систем, фоторобот должен иметь разносторонние тактильные сенсоры. Так, при проходе узких мест или движении вблизи вертикальных стенок необходимо иметь информацию о контакте габаритных частей робота со стеной или дном. В связи с этим внешние обводы фоторобота должны быть очувствлены сенсорами контакта. Лучше всего такие сенсоры выполнить в виде гибких усов размером до 15 см. Изгибание усов будет приводить к появлению сигнала. Порог чувствительности сенсора следует выбрать таким, чтобы сенсор не реагировал на гидродинамические воздействия потока воды при движении фоторобота. Подобными же тактильными сенсорами необходимо оборудовать фотобоксы и светильники. В момент касания препятствий привод фотобоксов и светильников будет срабатывать, как по аварийному сигналу.
Программное обеспечение поведения фоторобота должно содержать:
а) программу погружения—всплытия;
б) программу навигации;
в) программу горизонтального движения у дна в режиме маршрутной фотосъемки.
Каждая из этих программ в свою очередь делится на ряд более мелких и частных подпрограмм, решающих вполне конкретные задачи. Рассмотрим программы погружения—всплытия и программу навигации.
При погружении робота необходимо постоянно следить за выполнением двух заданий:
1) погружение с заданной скоростью;
2) погружение по заданной траектории.
Скорость погружения робота регулируется как его плавучестью, так и упорами движителей. При выполнении подпрограммы «плавучесть» робот непрерывно контролирует соотношение своих массы и объема и массы вытесненной жидкости. Контроль осуществляется путем считывания показаний датчиков давления в системе переменного балласта и датчиков расхода жидкости, принятой или откаченной из этой системы.
Плотность же среды в точке контролируется на основании показаний датчиков давления, температуры и электропроводимости и использования известного соотношения, связывающего эти величины. Дополнительно измеряется скорость звука и проводятся расчеты плотности с использованием этого параметра среды. Подобная избыточность позволяет обеспечить определение точного значения плотности среды.
Если за счет плавучести не удается достичь заданной скорости движения робота, включаются движители. Следует помнить, что роботу следует задавать время, достижения дна или поверхности и условия отклонения от этого задания. Робот же на различных участках движения будет самостоятельно выбирать скорость, минимизируя при этом затраченную энергию.
Упоры движителей контролируются по показаниям датчиков расхода и датчиков давления. В горизонтальной плоскости положение робота контролируется системой донной акустической навигации. После установки донных акустических маяков и точной их привязки к земным координатам назначается точка на дне, где робот должен начать самостоятельную деятельность. Далее спуск на воду осуществляется в наименьшем расстоянии до этой точки. С момента погружения робот контролирует свое положение над точкой по акустическим маякам во все время спуска. При движении у дна навигация осуществляется по донным маякам с уточнением по датчику направления и скорости обтекающего потока при движении робота. В процессе движения робот может периодически ложиться на дно и измерять скорость течения, которая затем вычитается из показаний датчика направления и скорости. На роботе устанавливаются, три датчика скорости течения по трем осям координат.
Еще удобнее контролировать скорость относительно дна акустической системой. Тогда не потребуется прерывать движение и измерять инстинную скорость течения. Можно допустить остановки только в начале и конце галсов. Можно заранее наметить точки обсервации на дне в зависимости от рельефа и провести в этих точках измерения скорости течения с судна. Можно также заранее установить донные маяки, измеряющие течение и передающие его значения по запросу от робота по акустическому каналу. Началу работ фоторобота должны предшествовать подробная гидрологическая и рельефная съемка и навигационная подготовка полигона. Это позволит дать граничные условия поведения робота, подготовить его к деятельности теперь уже в частично обследованной среде.