Как показано выше, в дизель-электрических гребных установках переменного тока количество генераторных агрегатов обычно превышает количество гребных электродвигателей, и иногда возникает Необходимость обеспечения параллельной работы синхронных генераторов. Условия параллельной работы генераторных агрегатов в автономных электроэнергетических установках, какими являются ГЭУ, более сложны, чем в разветвленных береговых электроэнергетических системах. Это объясняется, во-первых, несовершенством центробежных регуляторов угловой скорости дизелей, приводящих в движение синхронные генераторы, а также импульсным характером вращающего момента на валу дизеля. Во-вторых, генераторы работают при изменении нагрузки в широких пределах.
Параллельная работа синхронных генераторов в ГЭУ перемен-, ного тока особенно усложняется при отключенном гребном электродвигателе, например в период реверсирования. В этот период генераторы не связаны общей нагрузкой, их возбуждение отключается, чтобы иметь возможность переключать фазы в цепи главного тока при отсутствии напряжения. Так как регуляторы скорости дизелей являются центробежными, то они не в состоянии обеспечить синхронное и синфазное вращение всех генераторных агрегатов, не связанных общей нагрузкой. В результате генераторы выпадают из синхронизма. Для введения генераторов в синхронизм потребуется время, длительность которого зависит от количества совместно работающих генераторов.
Несовершенство регуляторов угловой скорости дизелей затрудняет одновременное и одинаковое изменение скорости всех совместно работающих генераторов в маневренных режимах ГЭУ.
Отмеченные обстоятельства длительное время препятствовали обеспечению параллельной работы ДЭГУ переменного тока, что в большой степени сужало область применения этого типа ГЭУ, ограничивая ее установками, в которых схемы главного тока включали в себя один генератор и один гребной электродвигатель.
Проблема обеспечения параллельной работы генераторов ДЭГУ переменного тока решалась в двух направлениях: разработкой специальных регуляторов дизелей, позволяющих осуществлять одновременное и одинаковое изменение угловой скорости всех совместно работающих дизель-генераторов; разработкой специальных конструкций и схем генераторов, с помощью которых можно обеспечить удержание генераторов в синхронизме при снятом напряжении на шинах электродвижения. Следует отметить, что все pery-i ляторы приводных двигателей, применяемые в настоящее время в ГЭУ, основаны на центробежном принципе. Регулирующее воздействие на приводной двигатель с помощью таких регуляторов возникает только при отклонении угловой скорости от заданной. Поскольку точность регулятора каждого агрегата ограничена, то система регулирования не в состоянии обеспечить синхронное и синфазное вращение валов всех генераторных агрегатов.
Вследствие этого ряд предложенных систем, обеспечивающих параллельную работу синхронных генераторов ГЭУ, включали в себя генераторы специальных конструкций, что усложняло как генераторы, так и систему электродвижения в целом. Поэтому такие системы не нашли широкого применения. Рассмотрим один из возможных путей решения указанной проблемы.
Очевидно, что если снабдить приводные двигатели всех совместно работающих генераторов такими регуляторами, которые обеспечили бы синхронное и синфазное вращение агрегатов, то все генераторы были бы постоянно готовы к включению на параллельную работу без всяких дополнительных устройств, так как они оказались бы связанными единым жестким валом.
Регуляторы, отвечающие сформулированным требованиям, разработаны на кафедре электрооборудования судов Николаевского ордена Трудового Красного Знамени кораблестроительного института.
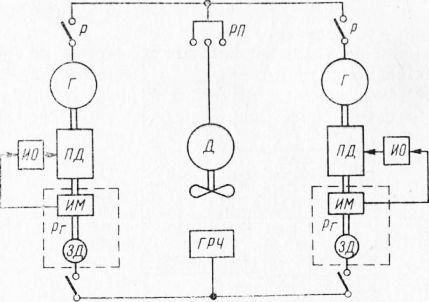
Рис. 1. Функциональная схема регулирования ДЭГУ.
Принцип действия системы автоматического регулирования угловой скорости совместно работающих генераторных агрегатов рассмотрим на примере ГЭУ, в состав которого входят два генератора Г (рис. 90), приводимых во вращение двумя приводными двигателями ПД. Каждый агрегат снабжен регулятором, состоящим из маломощного синхронного двигателя — задающего двигателя ЗД и измерителя момента ИМ задающего двигателя. Задающие двигатели всех регуляторов питаются от одного источника напряжения—генератора регулируемой частоты ГРЧ. Регуляторы воздействуют на приводные двигатели через исполнительные органы ИО.
Регулирование угловой скорости приводных двигателей, обеспечивающее их синхронное и синфазное вращение, осуществляется следующим образом.
Угловая скорость ЗД в каждом регуляторе выбирается равной синхронной угловой скорости генератора, одинаковой для всех генераторных агрегатов. Вследствие этого при вращении генератора с заданной угловой скоростью вал генераторного агрегата и нал ЗД вращаются синхронно и синфазно, вращающий момент на валу ЗД и выходной сигнал регулятора равны нулю. Это соответствует такому состоянию исполнительного органа ИО, при котором обеспечивается подача топлива двигателю ПД, соответствующая требуемой угловой скорости.
При отклонении угловой скорости приводного двигателя от требуемой относительное положение его вала и вала ЗД изменится, вал генераторного агрегата через муфту ИМ будет увлекать за собой вал ЗД, создавая вращающий момент, пропорциональный расхождению валов ПД и ЗД. На выходе ИМ в этом случае возникает сигнал, который через ИО воздействует на подачу топлива
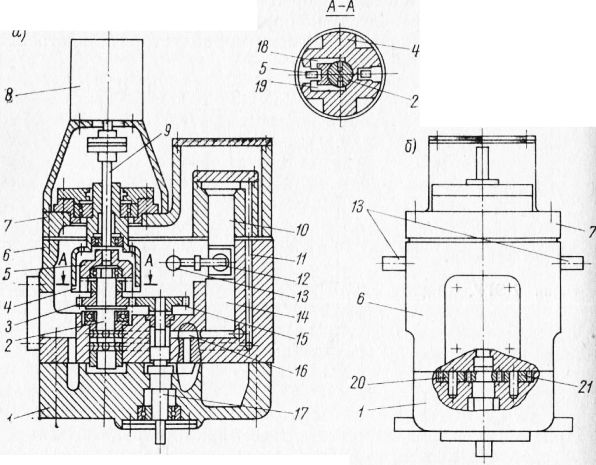
Рис. 2. Конструкция регулятора приводных двигателей ГЭУ переменного тока.
к ПД в таком направлении, чтобы угловая скорость генераторного агрегата установилась равной угловой скорости ЗД и оба вала — ПД и ЗД — заняли синфазное положение.
Так как задающие двигатели регуляторов всех агрегатов питаются от одного источника, то по окончании процесса регулирования валы всех генераторных агрегатов будут вращаться синхронно и синфазно так, как если бы все генераторные агрегаты были связаны единым жестким валом. Изменяя частоту питания задающих двигателей, т. е. выходную частоту ГРЧ, можно обеспечить одновременное и одинаковое изменение угловой скорости всех генераторных агрегатов.
Измеритель момента регулятора представляет собой вращающийся гидравлический потенциометр. Он состоит из диска с двумя соплами вилки, лопатки которой представляют собой заслонки, входящие в промежуток между соплами. Диск насажен на валик, который посредством шестерен связан с валиком, сочленяемым с валом регулируемого двигателя. Вилка связана с валиком, сочленяемым с ротором задающего синхронного двигателя.
Таким образом, вращающийся гидравлический потенциометр представляет собой поводковую муфту, ведущим элементом которой является диск, связанный через передачу с валом регулируемого двигателя, а ведомым — вилка, связанная с ротором задающего двигателя.
Сопла диска продольными отверстиями в валике и каналами соединяются с верхней и нижней полостями гидропривода, поршни которого посредством пальца связаны с валиком управления — исполнительным органом приводного двигателя. Рабочая жидкость к соплам потенциометра и в полости гидропривода подается шестеренным насосом, шестерни которого приводятся во вращение валиком.
Все элементы регулятора размещены в разборном корпусе, состоящем из трех частей: нижней, средней и верхней. Свободные полости корпуса используются как емкость для рабочей жидкости. Задающий двигатель с помощью фланца крепится к верхней части корпуса.
Регулятор работает следующим образом. При синхронном и синфазном вращении поля статора задающего двигателя (ЗД) и вала генераторного агрегата момент на валу ЗД будет равен нулю. В этом случае лопатки (заслонки) вилки обеспечат одинаковое открытие сопл и, следовательно, одинаковые давления на поршни гидропривода.