В начале своего развития ГЭУ применялись для создания 1ребных установок, в которых требовалось обеспечить отсутствие механической связи гребного винта и теплового двигателя. Такое ограниченное назначение ГЭУ не позволяло раскрыть все достоинства электродвижения и уменьшало конкурентную способность установок с электрическим приводом гребного винта-ског спользование Достижений теории и практики автоматиче-0 управления, широкое внедрение на судах современных средств автоматики позволяет создать высококачественные системы электродвижения, отвечающие многообразным условиям эксплуатации судна и обеспечивающие высокую степень использования установленного оборудования. С помощью ГЭУ появилась возможность решать такие задачи, которые затруднительно или невозможно решать на судах с другими типами гребных установок. К таким задачам, в частности, относятся: стабилизация мощности силовой установки; максимальное использование установленной мощности тепловых двигателей; оптимальное, с точки зрения расхода топлива, регулирование гребной установки; дистанционное управление; надежная защита от аварийных режимов и др.
Подробное рассмотрение всего комплекса вопросов автоматизации ГЭУ выходит за рамки настоящего пособия, поэтому здесь будут освещены только наиболее характерные задачи автоматизации ГЭУ и системы, с помощью которых они решаются.
Стабилизация мощности гребной установки. Обеспечение постоянства мощности на гребных валах чрезвычайно важно для гребных установок ледоколов, буксиров и других судов, работающих при широком изменении момента сопротивления на винтах.
Коэффициент пропорциональности k в этом уравнении изменяется при изменении условий эксплуатации судна (движение в свободной воде, буксировка, плавание во льду и др.). В результате в зависимости от условий плавания для указанных выше типов судов момент сопротивления на гребном винте может изменяться в диапазоне, ограниченном кривыми.
В соответствии с кривой 1 момент сопротивления может изменяться, например, при ходе ледокола в свободной воде, а в соответствии с кривой — при работе в швартовном режиме, т. е. при максимальном упоре винта и отсутствии поступательного движения судна. Кривая характеризует работу гребной установки в промежуточных условиях, например при ходе судна в битом льду.
Очевидно, что если номинальную мощность гребной установки выбрать по одному из режимов, то в других режимах ГЭУ может оказаться либо недогруженной, либо перегруженной.
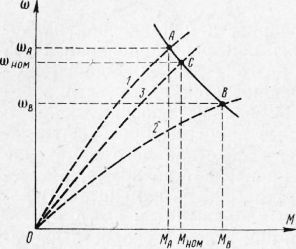
Рис. 1. Гипербола постоянства мощности.
Обеспечить постоянство мощности ГЭУ на всем диапазоне изменения нагрузки на гребном валу можно путем такого воздействия на гребной двигатель, при котором,вращающий момент М двигателя и его угловая скорость со изменились бы так, чтобы произведение этих величин оставалось постоянным и равным их произведению в номинальном режиме.
Зависимость угловой скорости электродвигателя от вращающего момента, называется механической характеристикой двигателя. Установившийся режим работы гребного электродвигателя на плоскости величин со и М характеризуется точкой пересечения кривой момента сопротивления на валу с механической характеристикой двигателя. Очевидно, что для обеспечения постоянства мощности на гребном валу при изменении условий плавания от швартовного режима до хода в свободной воде механическая характеристика двигателя должна описываться уравнением, т. е. уравнением гиперболы, получившей название гиперболы постоянства мощности.
Тепловые гребные двигатели такой характеристики обеспечить не могут. В ГЭУ постоянного тока гипербола постоянства мощности или приближение к ней обеспечивается элементами автоматического управления с воздействием на магнитные потоки генераторов и двигателей в системе генератор—двигатель. Системы электродвижения, обеспечивающие автоматическое регулирование мощности на гребных валах, рассмотрены в следующих параграфах.
Максимальное использование установленной мощности приводных двигателей генераторов. Перегрузочная способность приводных двигателей — дизелей и сочлененных с ними генераторов ДЭГУ — неодинакова. Кроме того, в процессе эксплуатации техническое состояние дизеля изменяется, что обусловливается перегревом цилиндров, ухудшением качества топлива, засорением форсунок и другими причинами. Эти факторы снижают мощность дизеля. Поэтому одной из важных задач систем автоматизации ГЭУ является коррекция мощности, отбираемой генераторами от дизелей по мере изменения технического состояния дизелей. Такая коррекция может осуществляться формированием дополнительных сигналов управления генератором в зависимости от угловой скорости приводного двигателя — дизеля, так как при перегрузке угловая скорость дизеля снижается по сравнению с номинальной скоростью. Такая коррекция повышает надежность ДЭГУ, поскольку ее отсутствие может вызвать срабатывание защиты от перегрузки дизеля и вывод из эксплуатации всей гребной установки.
Оптимальное управление гребной установкой. Оптимальным управлением называется такое, которое обеспечивает оптимальные, т. е. наилучшие в определенном смысле, законы изменения регулируемых величин. Создание оптимальных систем является важнейшим направлением современной теории и практики автоматического управления.
Задача оптимизации конкретной системы автоматического управления, в частности системы управления ГЭУ, сводится к отысканию и формированию таких законов изменения управляющих воздействий на систему, которые обеспечивают экстремумы некоторым функционалам, выражающим определенные технико-экономические показатели — к. п. д., быстродействие, экономичность.
Основное требование, которому максимально должна отвечать система автоматического управления, называется критерием оптимальности. Выбор критерия оптимальности является сложной задачей. Например, будучи оптимальной с точки зрения быстродействия, ГЭУ может оказаться неприемлемой по экономическим соображениям или по показателям надежности. Кроме того, ограниченность возможностей средств автоматики часто затрудняет и делает вообще невозможной реализацию аналитически установленных оптимальных законов управления. В других случаях реализация критерия оптимальности может повлечь за собой такое усложнение системы управления-ГЭУ, что ее создание становится нецелесообразным и приходится ограничиваться лишь определенным приближением к оптимуму.
Учитывая, что 15—25% эксплуатационных расходов ДЭГУ составляют затраты на топливо, следует считать, что одним из важнейших критериев оптимальности при управлении ГЭУ является минимальный расход топлива.
Анализ работы ДЭГУ показывает, что минимальный расход топлива на единицу мощности в час наступает при различных значениях мощности дизеля, в зависимости от степени загрузки, так как с изменением степени загрузки изменяется к. п. д. дизеля. Следовательно, задача оптимального с точки зрения минимума расхода топлива, управления ГЭУ заключается в том, чтобы обеспечить в различных режимах работы минимальное значение функции g=f(N) (g — расход топлива на единицу мощности в час; N — мощность дизеля).
Указанная задача решается путем использования таких средств автоматики ГЭУ, которые должны обеспечивать автоматический поиск и стабилизацию экономических режимов работы дизеля.
Другие из названных выше задач автоматизации ГЭУ — дистанционное управление, защита — решаются с помощью различных элементов автоматики, причем в последние годы все более широкое применение находят бесконтактные элементы электроавтоматики, такие, как магнитные усилители, тиристоры, логические элементы.
Благодаря использованию бесконтактных элементов автоматики повышаются экономичность и надежность ГЭУ.