Эффективность применения технических средств исследования океана в существенной степени зависит от навигационного обеспечения этих исследований. Особое значение точность навигации приобретает при использовании подводных аппаратов и роботов. Подводные аппараты и роботы используются с различных научно-исследовательских судов и в процессе своих действий в навигационном отношении имеют привязку к судну. Поэтому существенное значение в навигации подводных технических средств имеет как их собственная навигация, так и навигация судна.
Системы радионавигации судов не дают требуемой точности определения местоположения. Известные береговые радионавигационные системы «Декка», «Лоран» и другие характеризуются точной повторяемостью сигналов и относительно малой дальностью действия. Системы радионавигации, кроме того, отличаются поясной неоднозначностью. Бортовая радионавигационная система судна обычно измеряет и фиксирует разность фаз радиосигналов, которые получает от пар береговых станций. При движении судна расстояние до каждой из береговых станций изменяется, соответственно этому изменяется разность фаз. При этом фазовая информация оказывается неоднозначной, поскольку фаза повторяется с периодом 360 Каждый полный период определяет пояс, и один пояс можно отличить от другого только путем подсчета числа пересечений поясов на протяжении всего периода работ.
Кроме этого, радионавигационные системы дают местоположение относительно координатной системы береговых станций, которая не является ни общей, ни прямоугольной. Поэтому единственным способом движения судна по планируемой траектории является предварительный просчет связанных с радионавигационной системой декартовых координат по всему пути и ведение судна по этим предварительно рассчитанным координатам.
При проведении исследований в океане, помимо основной характеристики радионавигационной системы — ее точности в определении координат, существует еще ряд важных требований к системе навигации судна. Прежде всего система навигации должна быть работоспособна в любом месте Мирового океана, независимо от расстояния до берега и от времени суток. Система навигации должна быть независима от береговых средств. Должно быть обеспечено нейтральное отображение информации, которое обеспечивает поддержание желаемого курса судна.
Совершенно очевидно, что никакая отдельная навигационная система не обеспечивает выполнение всех названных выше требований. Очевидно, что лишь сочетанием различных средств в единой объединенной навигационной системе возможно удовлетворить сумму таких требований.
Один из возможных вариантов интегральной навигационной системы может быть представлен следующим сочетанием подсистем: спутниковая система навигации, гирокомпасный датчик курса, доплеровский гидролокационный датчик скорости, бортовая мини-ЭВМ.
Такая интегральная система навигации может включать также любую из систем радионавигации или же их сочетание.
Основная информация о местоположении судна в интегральной системе обеспечивается спутниковой системой навигации. Навигационные спутники находятся на круговых полярных орбитах на высотах порядка 1075 км и делают полный оборот вокруг Земли каждые 107 мин. Совокупность таких орбит образует своеобразную сеть, внутри которой вращается Земля. Таким образом, научно-исследовательское судно, находящееся в любой точке Мирового океана, периодически попадает под орбиту навигационного спутника и имеет возможность периодически получить достаточно точные координаты своего местоположения. В среднем координаты места можно получать с периодичностью 60—90 мин в зависимости от географической широты. В отличие от наземных радионавигационных систем, которые определяют местоположение судна путем практически одновременных измерений сигналов от нескольких фиксированных береговых радиостанций, измерения в системе спутниковой навигации осуществляются по отношению к последовательным положениям спутника по мере его движения. Этот процесс обычно занимает от 10 до 16 мин. За это время спутник проходит расстояние от 4400 до 7000 км, в связи с чем обеспечивается хорошая база измерений.
Поскольку измерения в системе спутниковой навигации не являются мгновенными, необходимо учитывать при расчетах координат движение судна во время прохождения спутника. Каждый спутник дает возможность вычислить его местоположение достаточно точно как функцию времени. С учетом вычисленного положения спутника, измеренной разницы расстояний до этих положений и информации о движении судна можно в конечном счете получить точные координаты места судна. Для этих вычислений используется мини-ЭВМ. Система спутниковой навигации в настоящее время является наиболее точной. По точности она сравнима с радионавигационными системами ближнего действия.
Двухканальные спутниковые системы навигации обеспечивают среднюю квадратическую погрешность в определении координат порядка 30 м. Одноканальные системы, в которых отсутствует коррекция ошибок за счет ионосферной рефракции, обеспечивают уровень средней квадратической погрешности порядка 92 м. Поскольку среднее время между моментами определения координат по спутнику составляет 60—90 мин в зависимости от широты местонахождения судна, то, как можно видеть, его положение большую часть времени может быть определено с точностью порядка 250 м. В промежутке между каждым моментом определения координат с помощью спутниковой системы интегральная навигационная система должна выполнять счисление пути, основанное на входных данных относительно скорости и курса судна,, и, следовательно, обеспечивать непрерывную навигационную информацию. Информация о курсе судна дается обычно гирокомпасом. При определении курса судна гирокомпасом необходима коррекция ошибок, определяемых широтой нахождения судна и северной составляющей скорости. Для этой цели используется обычно ручная корректировка. В интегральной системе навигации сигналы коррекции вырабатываются и автоматически вводятся центральным процессором. Одновременно вводятся поправки, компенсирующие эффекты ускорения судна и эффекты, определяемые компонентом скорости, совпадающим с восточным направлением,
Точное значение скорости судна относительно дна дается обычно двухосевой доплеровской гидролокационной станцией. Станция излучает звуковые импульсы высокой частоты четырьмя лучами в направлении дна. Отраженные от дна сигналы принимаются гидрофонами, усиливаются и выделяются по частоте. Доплеровский частотный сдвиг отраженных сигналов несет основную информацию о скорости судна. Информация от противоположных лучей является взаимодополняющей. Обе пары лучей расположены во взаимно перпендикулярных плоскостях, что позволяет получить информацию об ортогональных составляющих скорости судна. Существующее гидролокационное доплеровское оборудование обычно способно обеспечить точное значение скорости движения судна при ограниченных глубинах океана, в пределах до 2000 м. За этими пределами гидролокатор измеряет скорость движения судна по отношению к поверхности воды, от которой происходит отражение ультразвуковых сигналов.
Скорость движения судна, определяемая по доплеровскому сдвигу частоты, пропорциональна скорости звука в воде в месте расположения акустического излучателя и приемника. В свою очередь скорость звука является функцией температуры и солености морской воды, которые оказываются переменными во времени и в пространстве. Следовательно, необходимо для каждого места и времени измерений вводить соответствующие поправки на температуру воды и ее соленость. Такие поправки обеспечиваются непрерывными измерениями температуры и солености воды с судна. Еще больший эффект дает измерение непосредственно скорости звука. Измеренные значения поступают в процессор мини-ЭВМ интегральной системы навигации.
Погрешности в измерение скорости вносятся также качкой судна. Для коррекции их используются кренометры, показания которых также поступают в ЭВМ, которая вырабатывает соответствующие поправки. Используя информацию о двух компонентах скорости движения судна и информацию о его курсе с учетом всех поправок, центральный процессор бортовой ЭВМ выполняет непрерывное счисление пути. Во время прохождения над судном спутника осуществляется определение его точного местоположения и выполняется коррекция счислимого местоположения судна.. Таким образом, интегральная навигационная система способна обеспечить достаточно высокую точность навигации судна и, что особенно важно, дает возможность получить точную и непрерывную траекторию движения судна. Интегральные системы навигации в последнее время стали использовать информацию и от радионавигационных систем. Это, во-первых, увеличивает навигационную информацию и, во-вторых, устраняет отчасти недостатки в определении скорости судна доплеровской гидроакустической системой.
Создание избыточности навигационной информации позволяет прежде всего обеспечить получение навигационных данных в условиях отказа или плохого качества работы одной из подсистем. Кроме того, введенные в интегральную навигационную систему подсистемы радионавигации удобны тем, что их информация непрерывно записывается на магнитный носитель и, следовательно,, получаемая информация может быть подвергнута вторичному анализу.
Ограниченный диапазон действия гидролокационной доплеровской системы по глубине является часто причиной возникновения неточности при определении скорости движения судна. Это обычно возникает вдали от берега, где наблюдаются большие глубины ^ и становятся неэффективными радионавигационные станции ближнего действия. В то же время на таких расстояниях вполне эффективны радионавигационные станции дальнего действия, например типа «Лоран-С» или «Омега».
Сигналы радионавигационной системы «Лоран-С» отличаются стабильностью и повторяемостью. Интегральная система использует преимущества повторяемости для устранения ошибок, вызываемых неизвестной скоростью течения, и в то же время устраняет погрешность смещения системы «Лоран-С» путем калибровки по спутниковым замерам координат судна. Следовательно, результирующее качество функционирования навигационной системы становится эквивалентно случаю нахождения судна в акватории с небольшими глубинами, где доплеровский гидролокатор скорости дает точное значение скорости движения судна.
Следует заметить, что в случае применения рубидиевых стандартов частоты и коррекции координат с помощью спутниковой подсистемы сигналы радионавигационной подсистемы «Лоран-С» преобразуются в эквивалентные замеры дальности от судна до каждой береговой станции. Следовательно, сигналы только одной береговой станции могут успешно использоваться, если отсутствует информация от других береговых станций. Обычно информация от двух береговых станций обеспечивает полную возможность определения местоположения судна. В том случае, когда доступна информация от трех береговых станций, одна используется с соответствующими весовыми коэффициентами по методу наименьших квадратов, что в результате улучшает точность навигации судна. Следует заметить, что измерение дальности вместо обычно используемой разности расстояний существенно расширяет зону действия точной навигации системы «Лоран-С». Итак, точность определения местоположения судна при использовании интегральной системы навигации является сложной функцией глубины, частоты получения информации спутниковой подсистемы, состояния моря и состава используемых подсистем.
С применением интегральной системы навигации на исследовательских судах появляется возможность планирования исследований и автоматизации управления их проведением.
Одной из первых задач управления проведением исследований является определение линий курсов, по которым необходимо двигаться судну и удерживаться на этом курсе. Для этого в ЭВМ вводятся предварительно найденные широта и долгота начальной и конечной точек каждой линии курсов. На основе этой информации ЭВМ строит систему координат по траектории большого круга, проходящей через эти точки, которая определяет желаемый путь проведения исследований. Долгота и широта затем преобразуются в дистанцию вдоль линии следования и в дистанцию поперек линии следования. Поскольку желательно судну находиться на линии обследования точек, то вычисляются дистанция и пеленг до точки наведения. Судно может идти по продольным и поперечным координатам пути, которые отображаются обычно на дисплее. На дисплей выводятся поперечное расстояние до курса, поперечная скорость, дистанция вдоль курса, расстояние до конечной точки. Судно можно вести, минимизируя поперечное расстояние до курса и поперечную скорость, т. е. по оптимальному курсу.
Информация может выводиться на графопостроитель, где в реальном масштабе времени будут в этом случае отражены все маневры судна, которые оно совершает при переходе с одной линии обследования на другую или для возвращения на повторное обследование.
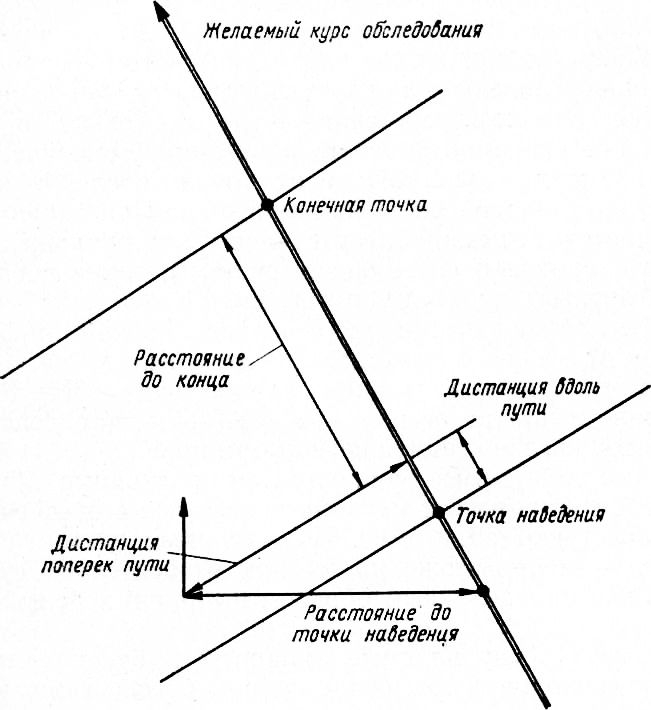
Рис. 1. Схема линий курса.
Ряд интегральных навигационных систем в последнее время используется для автоматизации вождения судов. При переключении управления судном на авторуль ЭВМ подводит судно к точке наведения, плавно разворачивает его на линию обследования V поддерживает желаемый курс до тех пор, пока не будут введены данные о новой траектории движения. Интегральная навигационная система оказывается исключительно полезной и при организации автоматической регистрации информации при проведении, например, геофизических исследований. Для интерпретации этой информации необходимо регистрировать точное место ее получения. Эта функция может быть выполнена автоматически интегральной навигационной системой путем регистрации ее АЦПУ. Наиболее удобной является регистрация информации на магнитный носитель. Записываются вся навигационная информация и информация о состоянии исследовательской системы в каждой точке измерений. Записываются также все эволюции судна в автоматическом и ручном режимах управления. Делается полная запись информации, которая используется для вычисления координат с помощью спутниковой навигационной системы, и необходимая корректировка счисления пути.
Преимуществом магнитной формы записи научной информации является возможность автоматического воспроизведения и нанесения обстановки на карту на берегу после окончания исследований. Это оказывается важным, поскольку в процессе проведения исследований точность навигации уменьшается с увеличением времени и расстояния от точки последней привязки с помощью спутниковой системы навигации. При вторичном анализе появляется возможность уточнения местоположения судна как до точки привязки спутниковой системы, так и после нее.
На магнитный носитель интегральной системы навигации может быть записана вместе с навигационной информацией информация от исследовательской аппаратуры.
С развитием и использованием технических средств подводных исследований возникла острая необходимость в обеспечении их достаточно точной навигационной информацией.
Подводные обитаемые аппараты и подводные автономные аппараты-роботы не имеют механической связи с обеспечивающим судном и действуют автономно. Поэтому необходима постоянная информация о местоположении их как относительно судна, так и относительно определенным образом выбранных реперных точек на дне.
Подводные телеуправляемые аппараты и буксируемые аппараты имеют механическую связь с судном обеспечения, что позволяет с определенной погрешностью вычислить их положение относительно судна. При этом, если навигационная система судна построена по интегральному принципу, то определение положения аппарата в абсолютной системе координат может быть достаточно точным. Так, в случае буксируемых аппаратов использование динамической модели кабельной линии связи и собственных навигационных характеристик аппарата, таких, как курс, крен и дифферент, а также угол наклона буксирной линии, позволяет с высокой точностью определить положение аппарата относительно судна. Однако при таком определении положения аппарата сохраняется возможность неоднозначности, особенно в наиболее сложных траекторных движениях, например на развороте или значительном изменении курса следования судна. Достаточно приемлемые результаты, по-видимому, могут быть получены лишь с помощью определения местоположения аппарата относительно дна.
Рассматривая, систему навигации подводных аппаратов и роботов, следует учесть, что важное значение приобретает знание точных значений собственных навигационных характеристик аппаратов и роботов — их курса, крена, дифферента и скорости движения относительно дна. Эти характеристики используются также и для управления подводными аппаратами и роботами. Автономные подводные аппараты, особенно необитаемые, получившие название подводных роботов (ПР), действующие самостоятельно, особенно нуждаются в точных значениях навигационных характеристик, поскольку они и задают, и выдерживают заданную траекторию. Поэтому в дальнейшем будем рассматривать проблему навигационного обеспечения применительно к этому наиболее сложному и универсальному типу подводных аппаратов.
Как отмечалось, полученные от навигационных приборов сигналы либо вводятся в контур управления для обеспечения движения ПР по заданной программной траектории, либо после соответствующей обработки поступают на индикацию — для счисления пути при исследовании распределенных параметров океана. Помимо этого, возможна работа навигационной системы и в комбинированном режиме, когда по боковому движению ПР осуществляется определение пройденного маршрута, а по продольному — управление отслеживанием меняющегося рельефа дна. Такие режимы работы ПР при достаточно большом времени его функционирования (8—10 ч) возможно обеспечить лишь при наличии надежной системы навигации, дающей достаточно точное определение его координат (10 м).
При решении задачи навигации оперируют с тремя траекториями движения ПР:
1) требуемая (программная) траектория — движение по этой траектории направлено на достижение цели функционирования ПР;
2) измеренная траектория — полученная с выхода навигационной системы, работающей автономно;
3) действительная траектория — являющаяся геометрическим местом точек истинного положения центра масс ПР при выполнении заданной программы движения.
При создании системы управления движением подводных аппаратов повышение точности навигационных систем осуществлялось в основном за счет совершенствования отдельных приборов, расширения состава бортовой аппаратуры, сглаживания помех. Поскольку все сигналы навигационных приборов и их ошибки на практике представляют собой случайные функции, то для анализа следует использовать статистические и вероятностные Оценки. К настоящему времени разработаны основы теории статистической обработки данных в навигации. Применение этого новейшего метода при создании ПР нового поколения связано с требованием большей корректности навигационных приборов, что обеспечивает более широкие возможности их преобразования и гарантирует в конечном итоге большую точность навигационных данных, чем при использовании традиционных способов. Поэтому существует задача преобразования навигационных данных, связанная со спецификой автономного функционирования ПР, решение которой требует внимательной проработки имеющихся математических методов.
Действительная- траектория движения центра масс ПР может быть получена с выхода математической модели системы навигации. Цель применения модели состоит в том, чтобы с ее помощью обнаружить погрешность системы навигации путем сравнения в одни и те же моменты времени исходных сигналов самой системы с полученными выходными сигналами математической модели, имеющей большую точность. Следовательно, для того, чтобы при решении навигационной задачи получить максимально достижимую точность, следует произвести вычислительные операции над выходными сигналами неидеальных навигационных приборов. Поскольку пределы точности определения координат в первую очередь ограничиваются свойствами измеренных данных, которые существенно зависят от приборной реализации, предварительно следует решить вопрос о структуре системы, наилучшим образом использующей сигналы неидеальных навигационных приборов.
Комплексный подход к проблеме создания надежного навигационного обеспечения системы управления ПР основывается на комбинированном использовании в системе навигационных устройств, различающихся по физическому принципу действия. В качестве таких средств представляется возможным использовать инерциальную навигационную систему (ИНС) и гидроакустическую навигационную систему (ГНС) с помощью донных акустических маяков, устанавливаемых в определенных точках дна обычно по триангуляционной системе.
Их совместное применение, как показывает опыт разработки систем навигации морских подвижных объектов, дает возможность ограничить растущую во времени ошибку счисления пути ИНС с помощью использования данных ГНС. Учет дополнительной информации от датчиков скорости, глубиномера, эхолота позволяет преобразовать алгоритм работы системы навигации так, чтобы изменить структуру уравнений. Именно поэтому комплексное использование информации различных датчиков комбинированной системы позволяет повысить точность и надежность определения координат центра масс ПР.
В свою очередь реализация комбинированной системы навигации (КСН) связана с задачей оптимального компенсирования системы, обладающей структурной избыточностью, позволяющей проводить решение навигационной задачи несколькими способами. Поэтому на возможность минимизации навигационных погрешностей важное влияние оказывает выбор структуры комбинированной системы навигации. Для решения задачи синтеза структуры КНС целесообразно воспользоваться методом аналитического конструирования, разработанным А. А. Красовским.
Для решения задачи этим методом следует разделить процесс функционирования ПР на ряд этапов и отдельные режимы. Даже при умеренном пространственном маневрировании гидродинамическое взаимодействие ПР со средой оказывается нелинейным и чрезвычайно сложным. Это обстоятельство вынуждает в дальнейшем остановиться на рассмотрении отдельных этапов стабилизированного движения подводного робота. Этапы функционирования многоцелевого автономного ПР могут быть представлены в виде «дерева целей». Этап 1—2 соответствует спуску подводного аппарата на воду, 2—3 — погружению на заданную рабочую глубину. Далее следуют этапы, зависящие от поставленной цели функционирования ПР. При проведении обследования ограниченного района океана, например фотографирования донной поверхности или обнаружения затонувшего объекта, на этапе 3—4 осуществляются спуск ПР на заданное отстояние от дна, разворот на программный галс движения и разгон до требуемой скорости движения. Этап 4—5 является режимом отслеживания меняющегося рельефа дна, обеспечиваемый СУД, на котором производится непосредственное обследование среды океана с помощью научно-исследовательской аппаратуры. Этап 5—6 соответствует выполнению маневра для выхода в начальную точку движения новым галсом и т. д. На всех указанных этапах КСН работает в индикаторном режиме, осуществляя счисление пройденного ПР пути. Этап 6—7 соответствует возвращению ПР на поверхность, 7—8 — включению средств обнаружения, 8—9 — подъему на борт обеспечивающего судна (возвращение на берег). Для выхода ПР в заданную точку морского полигона, например при обследовании устья донной буровой скважины или же идентификации ранее обнаруженного объекта, после погружения на этапе 9—10 следует дальнее наведение на заданную точку по обозначающему гидроакустическому маяку-ответчику; 10—11 — выработка закона программного движения по контрастам физических полей на цель; 11—12 — целенаправленное движение ПР; 12—13 — коррекция закона движения по поступающим данным от поисковых датчиков; 13—14 — определение координат найденной цели; 14—15 — динамическое позиционирование и осуществление рабочих операций; 15—7 — возвращение на поверхность. При этом КНС работает в комбинированном режиме, обеспечивая выработку управляющих сигналов СУД и фиксацию координат точки морского полигона, в которой были произведены рабочие операции.
Для сбора гидрофизических данных требуется осуществить движение ПР по заранее выработанной программной траектории. В этом случае после погружения на заданную глубину КСН на этапе 3—7 работает в режиме управления, а остальные этапы не отличаются от рассмотренных ранее. Помимо указанных этапов, следует отметить также этапы технического обслуживания, предварительной подготовки КСН, ввода данных программного движения и т. д., являющиеся общими для всех режимов работы.
Назначение ПР, режимы и этапы функционирования КСН следует дополнить требованиями для каждого этапа, выражающимися в количественных характеристиках, которые охватывают условия выполнения, ограничения, точность и быстродействие для каждого этапа. Совокупность «дерева целей» и требований к комбинированной системе навигации ПР составляет основу программы создания навигационной системы. Для разработанных датчиков и подсистем с большей достоверностью известны точностные характеристики, спектры шумов, условия их работоспособности. Это оказывается существенным при синтезе структуры КСН и определении области функционирования ее отдельных элементов. Поэтому следует рассмотреть существующие технические средства, удовлетворяющие предъявленным требованиям.
Нужно отметить, что массо-габаритные ограничения и технологические трудности изготовления гиростабилизированной платформы заставляют использовать в КСН ПР бесплатформенную инерциальную систему (БИНС). Известно, что из-за неустойчивости вертикального канала инерциальной системы с помощью акселерометров целесообразно измерять только две горизонтальные составляющие сил, действующих на центр масс ПР. Глубина погружения, в этом случае может определяться точным глубиномером и вверх — вниз направленным эхолотом. Поэтому в системе целесообразно использовать два установленных в плоскости акселерометра и три датчика угловых скоростей (ДУСа), жестко установленных на ПР таким образом, чтобы они измеряли его угловые скорости поворотом относительно собственных осей. Определение углов разворота ПР, полученных после интегрирования сигналов гироскопов, необходимо для разложения составляющих ускорения, измеренных акселерометрами, на оси инерциальной системы координат. Эту операцию способна осуществить бортовая ЭВМ, которая по известным начальным условиям и полученным сигналам вычисляет направляющие косинусы между соответственными осями ПР и осями положения «имитируемой» стабилизированной платформы. В дискретные моменты времени независимо от ЭВМ, используемой для моделирования ИНС, счетно-решающее устройство бортовой ИНС самостоятельно решает задачу навигации. Предполагается, что система управления при этом удерживает ПР на действительной траектории, которая отличается от измеренной из-за возмущений и шумов, действующих на навигационные приборы, но не на модель БИНС. Однако точность математического моделирования положения инерциального трехгранника определяется не только возможностями ЭВМ, но и характеристиками соответствующих измерителей (акселерометров, ДУСов). За счет худших условий работы навигационных датчиков в негоризонтируемой палубной плоскости ПР достижимая точность БИНС несколько хуже, чем у ИСН со стабилизируемой платформой. Но поскольку диапазоны изменения угловых параметров ПР в установившемся движении сравнительно небольшие (до 10°), а точность определения его углового положения с помощью гировертикали достаточно высокая (до 0,5°), указанный недостаток БИНС можно устранить соответствующей обработкой первичной навигационной информации.
Особенность эксплуатации БИНС заключается в определении установочных углов осей измерительных датчиков относительно осей корпуса ПР, а также его углового положения относительно местной системы координат. Первые могут жестко устанавливаться перед началом эксплуатации ПР, значения- вторых возможно определять и вводить в КСН перед началом движения на каждом прямолинейном этапе движения по сигналам гировертикали и ДУСов. Таким образом, надежность, масса, габариты и время выставки БИНС по сравнению с платформенной ИНС более предпочтительна, а ее изготовление проще.
Комбинированная система навигации наиболее эффективна и надежна в случае применения в ней корреляционно-экстремальной гидроакустической навигационной системы. В такого рода системе используется корреляционная связь между реализациями случайных функций определения дальности, а вычисление координат положения ПР в системе маяков, установленных на дне, ведется путем поиска экстремума корреляционной функции. Для этого необходима исходная информация о статистической структуре пространственного гидроакустического поля и метода обработки акустических сигналов. Именно поэтому реализация корреляционно-экстремальных ГНС требует проведения специального исследования.
В качестве примера в табл. 2 приведены этапы, отражающие области функционирования основных навигационных устройств многоцелевого ПР. Знак «+» означает, что соответствующее средство должно обладать полной работоспособностью; знак «±» означает периодическую возможность получения полезной информации, необходимой для решения задачи навигации.
Для синтеза КСН важной и необходимой частью исходного материала являются математические модели управляемых и индикаторных процессов, отражающие математическую постановку задачи навигации ПР. Причем при синтезе информационной части КСН признано целесообразным использовать линеаризованные математические модели движения ПР, отражающие его стабилизированное прямолинейное движение на отдельных этапах целенаправленного функционирования. Такое допущение объясняется спецификой рассматриваемой навигационной задачи: значения составляющих скорости ПР меняются сравнительно мало и весьма медленно. Отсутствие жестких ограничений на продолжительность переходных процессов при управлении стабилизированным движением ПР позволяет в установившихся режимах ограничиться быстродействием КСН порядка нескольких минут. Вследствие ограниченности района работы ПР нет смысла рассматривать его движение в географической системе координат,
Минимальное число маяков-ответчиков и уравнений, необходимых для решения плоской навигационной задачи, — два. При трех и большем числе маяков система уравнений оказывается избыточной, что позволяет повысить надежность и точность определения координат ПР.
Динамические условия функционирования ПР в частично прогнозируемой среде океана известны не полностью. Часть воздействий случайна и представляет собой множество реализаций с вероятностной мерой, подлежащей определению на этом множестве. В этой связи выходные сигналы КСН также являются случайными функциями, вероятностные характеристики которых подлежат специальному определению, что возможно осуществить при проведении отдельного исследования.
Для повышения уровня достоверности получаемой информации очевидно, должна применяться система обработки информации, использующая математическую модель контролируемых процессов. Фильтры Калмана — Бьюси являются примером подобных систем. Такая система, получая сигналы неидеальных навигационных средств, способна выдавать сигналы, с максимально достижимой точностью воспроизводящие истинные текущие координаты подвижного объекта. Конечно, абсолютно точное воспроизведение вектора х(Х, ф, k, h, V, со, t) невозможно. Вектор Фь k\, h\, Vi, coi, ^i), являясь лишь оценкой вектора х, все же может давать соответствующие данные для- построения действительной траектории движения центра масс ПР. При этом с помощью метода оптимальной фильтрации Калмана необходимо обеспечить устойчивость выходного вектора модели х относительно вектора истинных координат хь
Метод оптимальной фильтрации Калмана может быть применен в КСН для фильтрации ускорений, возникающих вследствие влияния качки и вибрации, для разделения сигналов абсолютного и гравитационного ускорений ПР, для коррекции инерциальных приборов и преобразований измеряемых данных [15, 17]. Смысл такого подхода к решению навигационной задачи заключается в том, чтобы на основании использования внешней информации и сведений о вероятностных характеристиках навигационных приборов найти наилучшую оценку выходных данных КСН. С этой целью определяется оптимальный оператор динамической системы в виде оператора линейного дифференциального уравнения и подбирается дифференциальное уравнение оптимального фильтра. Алгоритмы этих фильтров имеют удобную для реализации на ЭВМ, форму и позволяют обрабатывать поступающую информацию КСН в реальном масштабе времени. При этом имеется возможность привлечения данных от различных источников информации для произвольно распределенных моментов их переключения. Предполагается, что модель динамической системы линейна, а наблюдения содержат помеху белого шума. При совершении маневров перехода от одного этапа функционирования ПР на другой возникают большие ускорения, законы распределения которых не соответствуют гауссовому. В этой связи фильтрация Калмана может осуществляться только на установившихся прямолинейных участках движения ПР, когда рассматриваемые случайные процессы подчинены распределению Гаусса, что обычно имеет место на практике. Поэтому для обеспечения работоспособности КСН в нестабилизированных режимах движения необходимо использовать сигналы СУД, которые могут информировать о выполняемых маневрах ПР. В этом проявляется преимущество системы, обладающей структурной избыточностью.
Формирующие фильтры, которые при подаче на вход белого шума генерируют случайный процесс с заданными корреляционными функциями, представляют собой линейные динамические системы. Поскольку ординаты нормального случайного процесса U(t) являются независимыми случайными величинами, то х(t) и y(t) будут марковским процессом, так как являются решением уравнения первого порядка, однозначно определяемым его начальным значением. Поэтому гауссов марковский случайный процесс х(t) всегда может быть представлен как вектор состояния линейной динамической системы, возбуждаемой гауссовым случайным процессом U(t) (белым шумом), который имеет гауссов вектор начального состояния x(t).
Задачей оптимальной фильтрации является нахождение наилучшей оценки х ( /) вектора динамического состояния ПР, описываемого уравнениями (114) на основании наблюдаемого сигнала X\(t) в интервале времени (to, t). Разность между требуемым x(t) и действительным х(^) выходными сигналами является погрешностью оценки e(t)=x(t) —x(t). В качестве критерия точности КСН целесообразно использовать минимум средней квад-ратической погрешности. В качестве критерия оптимальности следует принять условие, при котором вектор х(() должен представлять собой несмещенную оценку x(t), и минимизировать ошибку e(t). Исходная информация для расчета оптимального фильтра содержится в корреляционной матрице погрешности оптимальной линейной фильтрации, которая определяется нелинейным дифференциальным уравнением.
Основными соотношениями, характеризующими алгоритм метода оптимальной фильтрации Калмана, являются следующие:
1) дифференциальное уравнение оптимального фильтра, на вход которого поступает наблюдаемый сигнал и который вырабатывает наилучшую оценку выходного сигнала системы
2) дифференциальное уравнение погрешностей оптимальной линейной оценки;
3) выражение для матричного коэффициента усиления, оптимального фильтра через корреляционную матрицу погрешностей оценки;
4) нелинейное дифференциальное уравнение для корреляционной матрицы погрешностей оптимальной линейной оценки.
Основными этапами разработки статистического фильтра являются:
1) выбор фазовых координат, описывающих состояние динамической системы и зависящих от принятой структурной схемы КСН;
2) вывод динамических уравнений, характеризующих изменение этих координат;
3) вывод уравнений, связывающих фазовые координаты ПР с получаемой навигационной информацией;
4) линеаризация, уравнений, описывающих погрешности системы;
5) использование уравнений калмановской фильтрации для условий движения ПР, при которых допустима линеаризация уравнений погрешностей и сигналы навигационных приборов подчинены гауссовому закону распределения.
При реализации алгоритма бортовой ЭВМ проблема выбора размерности вектора погрешностей является основной, так как количество необходимых вычислений растет пропорционально кубу размерности модели погрешностей. Поэтому предварительно важно исследовать возможности сокращения размерности модели погрешностей. Для проведения большого объема вычислительных операций, необходимых для решения, задач навигации ПР, сложной комбинированной системе навигации требуются специализированные вычислительные устройства. Основным источником навигационной информации в КСН является бортовая ЭВМ. Одна из трудностей создания КСН состоит в практической реализации фильтра Калмана на ЭВМ, ко!чэрый позволит количественно оценить и оптимизировать погрешности отдельных подсистем. Полученные количественные оценки следует периодически вводить для коррекции погрешностей выходных сигналов КСН. Функциональная избыточность системы навигации, обусловленная наличием различных дополнительных средств (курсовая система, глубиномер, датчики скорости течения, эхолот), позволяет производить такую коррекцию от различных средств, имеющих наибольшую точность из совокупности измеренных сигналов одного и того же навигационного параметра. Причем калмановская фильтрация позволяет получить в оптимально комбинированной системе навигации более высокую точность, чем может обеспечить отдельное прецизионное средство.
Такой подход к созданию комбинированной системы навигации гарантирует необходимую информационную и структурную избыточность, позволяет обеспечить избыточность автономного ПР по управлению, выражающуюся в достаточном запасе возможных динамических состояний объекта при решении различного рода задач исследования океана. В этом случае уровень автономности подводного робота повышается, так как его СУД обладает свойством адаптации к частично прогнозируемым изменениям параметров среды океана.
Проведенный анализ показывает, что при разработке надежной системы навигации автономного подводного робота наиболее актуальными являются следующие задачи:
— разработка методов аналитического конструирования структуры оптимальной КСН, обладающей функциональной избыточностью;
— исследование методических и инструментальных погрешностей элементов БИНС, выявление физических явлений, вызывающих рост погрешностей счисления координат, и определение способов их уменьшения до допустимого уровня в установленных режимах движения ПР;
— теоретическое и экспериментальное определение систематических погрешностей и вероятностных характеристик погрешностей навигационных приборов, а также случайных помех внешней среды, увеличивающих уровень шумов датчиков БИНС;
— разработка линеаризованных математических моделей установившегося движения ПР при целенаправленном функционировании;
— разработка алгоритма функционирования БИНС и решение задачи оптимальной обработки получаемой навигационной информации с помощью метода калмановой фильтрации;
— определение технических требований к ЭВМ, управляющей целенаправленным движением ПР в реальном масштабе времени;
— разработка и исследование корреляционно-экстремальной ГНС, показания которой обеспечивают оценку действительных координат ПР в местной системе координат.
Рассмотренный подход к созданию навигационной системы подводных аппаратов и роботов предполагает, следовательно, использование комбинированного, интегрального принципа построения, который успешно используется при создании высокоточных систем навигации надводных судов, рассмотренных выше.
Очевидно, что только интегральный принцип построения навигационной системы способен обеспечить приемлемые на современном уровне развития технических средств подводных исследований точностные характеристики.