Существование течений в Мировом океане определяется общей циркуляцией, являющейся осредненным за длительное время движением вод в глобальном масштабе. Общая циркуляция создается как в результате нагревания, охлаждения, осадков и испарения, так и в результате действия ветра и атмосферного давления.
В океане существуют как поверхностная горизонтальная циркуляция вод, так и циркуляция глубинных вод. О поверхностной циркуляции существуют вполне установившиеся и экспериментально исследованные представления. О циркуляции же глубинных вод достаточных сведений пока не существует. Известно, однако, что в большинстве случаев циркуляция глубинных вод отличается от поверхностной. Циркуляция глубинных вод определяется только термохалинными (температурой, соленостью) факторами, тогда как поверхностная — термохалинными и ветровыми факторами.
Помимо горизонтальной, в океане существует вертикальная циркуляция. Методика и техника измерения вертикальных перемещений водных масс находятся на начальном этапе развития. По физической природе вертикальные движения водных масс также можно разделить на ветровые и термохалинные. Ветровые воздействия вызывают сгонно-нагонные процессы, которые в свою очередь становятся причиной вертикальных движений. Опускание более тяжелых вод, образовавшихся на поверхности, до глубин соответствующей плотности также приводит к движению водных масс по вертикали.
В Мировом океане существует система разнообразных течений. Так, известны зональные течения, направление которых близко к восточному или западному.
Зональные течения связываются в единую систему меридиональными течениями. Различают западные пограничные течения (например, Гольфстрим, Куросио) и восточные пограничные течения (например, Канарское, Перуанское).
Течения, направления которых противоположны соседним течениям в горизонтальной плоскости, известны как противотечения. Течения, направления которых противоположны в вертикальной плоскости, известны как подповерхностные или глубинные противотечения.
Течения, существующие в узкой экваториальной полосе, носят название экваториальных.
В зависимости от расхода водной массы в течении, а также изменения скорости по вертикали и горизонтали течения делятся на узкие быстрые струйные и широкие медленные.
Глобальные системы океанических течений подвержены климатической, годичной и сезонной изменчивости.
Сезонные колебания скорости течений, как предполагают, связаны с годовым ходом скорости ветра в умеренных и высоких широтах. В тропической зоне течения определяются действием летнего и зимнего муссонов.
Поскольку регулярные наблюдения за течениями были начаты в последние десятилетия, достоверных данных об их климатической и годичной изменчивости в настоящее время нет.
В последние годы в океане обнаружены и изучаются нестационарные вихреобразные возмущения поля океанических течений, которые названы синоптическими вихрями. Их горизонтальный размер обычно достигает 300—400 км, а на глубину они простираются на сотни и тысячи метров. Вихри движутся в океане с поступательной скоростью до нескольких сантиметров в секунду. Наиболее вероятные причины возникновения вихрей в океане — это неустойчивость струйных течений и взаимодействие волн Россби.
Чисто условно синоптические вихри делятся на фронтальные вихри и вихри открытого океана.
Фронтальные вихри образуются в системах фронтальных течений типа Гольфстрим. При этом процесс образования вихрей несимметричен. По одну сторону течения образуются циклонические вихри, по другую — только антициклонические. Фронтальные вихри являются единичными образованиями. Скорость вращения воды во фронтальных вихрях весьма велика и достигает в верхних слоях воды нескольких метров в секунду.
Вихри открытого океана представляют собой последовательно-упорядоченное перемещение системы циклоническо-антициклониче-ских систем е устойчивым горизонтальным масштабом (расстояние от центра до точки с наибольшей скоростью) порядка сотни километров. Скорость течения в поле вихрей достигает 35 см/с.
Изменчивость океанских течений во времени и пространстве до сих пор изучена недостаточно. Известно, что скорость течения с глубиной может менять свое направление несколько раз. По современным представлениям, наиболее низкочастотная часть флюк-туаций скорости течения обусловлена изменчивостью глобальных течений.
Максимальные скорости самых мощных океанских течений (Ку-росио, например) достигают 2—2,5 м/с, а экваториальных противотечений 1,0—1,5 м/с. Обычная же скорость большей части других океанских течений значительно меньше и составляет примерно 10 см/с.
Циркуляция глубинных и придонных вод на глубинах более 2 км существенно отличается от циркуляции в верхнем и промежуточном слоях океана. Средняя по океану меридиональная скорость глубинной циркуляции составляет 3,5 см/с.
течения измеряются либо в полярной системе координат, когда измеряется модуль скорости и угол его ориентации относительно магнитного меридиана, либо в декартовой системе координат, когда измеряются проекции вектора скорости на ортогональные оси координат и угол ориентации этой системы координат относительно магнитного меридиана. По результатам измерений во втором случае определяются проекции вектора скорости течения на меридиан и параллель.
Существующие методы измерения течений в океане можно свести к следующим двум группам:
а) прямые методы измерения, при которых поток непосредственно воздействует на датчик;
б) косвенные методы измерения.
Прямые методы измерения течений возникли с того момента, когда человеку потребовалось знать модуль и направление течения. Речь идет о поплавковом методе. Самый простой способ измерения— это плавающий сосуд (бутылка), помещенный в поток. При этом визуально измеряется расстояние, которое такой поплавок проходит в потоке, и время, в течение которого поплавок преодолеет отмеченный участок пути.
В дальнейшем поплавковый метод измерения течения был существенно усовершенствован. Так, в 1955 г. Сваллоу использовал для измерения глубинных течений поплавки нейтральной плавучести. Поплавок нейтральной плавучести был изготовлен из двух труб алюминиевого сплава длиной по 3 м. В одной трубе находились передатчик и блок питания, а вторая труба обеспечивала плавучесть поплавка. Поплавок нейтральной плавучести мог погружаться и работать на глубинах до 5000 м. Передатчик поплавка излучал ультразвуковой сигнал на частоте 10 кГц. С кормы и носа судна в воду опускались гидрофоны, которые регистрировали ультразвуковой сигнал от поплавка, измеряя таким образом по времени разности прихода сигнала расстояние до поплавка, а следовательно, регистрируя и скорость его движения в потоке. Регистрация принятых гидрофонами сигналов осуществлялась двухлучевым осциллографом, который определял запаздывание во времени сигналов, воспринимавшихся гидрофонами. Затем строилась полярная диаграмма запаздывания между сигналами, принимаемыми гидрофонами, в зависимости от ориентации судна. Эта диаграмма в виде восьмерки имела острый минимум в тот момент, когда линия, соединяющая гидрофоны, оказывалась перпендикулярной направлению на поплавок. Эта процедура повторялась при изменении координат судна. Координаты судна определялись относительно реперного буя.
Поплавок нейтральной плавучести можно было отрегулировать с высокой точностью. Эта процедура выполнялась в ванне с раствором соли с известной плотностью и температурой. Перед опусканием поплавка для измерения течения проводились измерения температуры и солености, на основании которых по соответствующей таблице рассчитывалась плотность воды на горизонте, где должно было измеряться течение. После регулировки плавучести поплавка на соответствие плотности воды на горизонте измерения поплавок погружался в воду.
Для измерения вертикальной составляющей скорости потока на любой глубине используется также буй нейтральной плавучести. Такой буй представляет собой полый шар диаметром 250 мм, в котором размещены источник питания и генератор ультразвуковых колебаний. К шару подвешивается акустический излучатель. На шаре установлена решетка из наклонных лопастей. При наличии вертикального потока, создаваемого, например, внутрен ними волнами, шар с излучателем начнет вращаться вокруг вертикальной оси за счет вращающего момента от взаимодействия потока с наклонными лопастями. Скорость вращения соответствует скорости потока. Скоростные же характеристики буя определяются лабораторно заранее. Угловая ориентация буя нейтральной плавучести передается на судно по гидроакустическому каналу каждые 2 с. Чувствительность такого поплавкового измерителя течения 0,028 см/с.
С помощью такого поплавка нейтральной плавучести был получен ряд интересных данных. Так, удалось измерить частотный спектр потенциальной и кинетической энергии, относящейся к периодам от нескольких минут до суток.
Для изучения прибрежных донных течений использовались донные поплавки грибообразной формы, которые имели небольшую отрицательную плавучесть. Перемещаясь с потоком вдоль дна, такие поплавки затем выбрасывались на берег. По расстоянию от места погружения до берега и по времени их движения определялись скорость придонного течения и его направление. Следует заметить, однако, что за счет парусности поплавка направление-его Движения не всегда совпадало с направлением течения.
Такой способ измерения использовался для измерения поверхностных течений. При этом скорость течения определялась с большей точностью, чем вертушечным методом.
Более просто обрабатываются данные измерений в приборе, где вместо радиоактивного индикатора используется объем подогретой воды. Такой измеритель течений устроен следующим образом. Перед флюгаркой, ориентирующейся по потоку, установлена подогреваемая электрически тонкая проволока, на которую подаются импульсы тока длительностью 0,3 мс. При прохождении каждого из импульсов в нагревателе выделяется 0,01 Дж тепла. Небольшой объем воды вокруг проволоки таким образом импульсно подогревается. На расстоянии 2 см от нагревателя установлен датчик электропроводимости, регистрирующий изменение электропроводимости в момент прохождения через него подогретого объема воды. Изменение электропроводимости составляет при этом 3—4 %. Растекание же подогретой воды на таких расстояниях незначительно. Так, если у нагревателя подогретый объем составляет 1 мм3, то при скорости потока 0,5 см/с у датчика электропроводимости он равен примерно 3 мм3. Измеритель течения отличается высокой чувствительностью и не требует специальной калибровки. Такой измеритель особенно целесообразно применять для измерения медленных придонных течений.
Как видно из приведенных выражений, результаты измерений скорости потока зависят от плотности, вязкости, температуры среды, условий обтекания, структуры и сноса потока. Эта зависимость имеет сложный нелинейный характер и количественно может быть оценена только при условии рассмотрения малых отклонений от установившегося состояния.
К числу наиболее совершенных датчиков скорости относится ротор Савониуса. Он характеризуется высокой пороговой чувствительностью, которая лежит в пределах 1,0—2,5 см/с. Характеристика зависимости скорости вращения от скорости потока у ротора Савониуса близка к линейной, как показывают эксперименты, в диапазоне скоростей потока от 3,5 до 200 см/с.
Ротор Савониуса, к сожалению, критичен к биологическим обрастаниям, которые вносят существенные погрешности в измерения скорости. Как показали эксперименты, ротор обладает заметным гистерезисом — реакция его на смену направления течения весьма различна. Наоборот, пропеллерные датчики скорости с горизонтальной осью вращения автоматически исключают волновой компонент скорости за счет своей реверсивности. Большой момент вращения, развиваемый датчиком в потоке, снижает влияние биологического обрастания.
Преобразование скорости течения в электрический сигнал осуществляется различными способами. Так, известен преобразователь, где преобразование осуществляется магнитами, закрепленными на ободе датчика. При вращении датчика магниты проходят мимо геркона, который фиксирует число оборотов датчика. Частота импульсов на герконе пропорциональна скорости вращения датчика.
В качестве магниточувствительного элемента вместо геркона используется небольшая рамка из пермаллоя с обмоткой. Эта обмотка включена между корпусом и общей точкой двух конденсаторов. При вращении датчика магниты, укрепленные на ободе датчика, проходят мимо рамки и намагничивают пермаллой. Возникающий сигнал модулируется, детектируется и формируется в виде последовательности счетных импульсов. Такая схема позволяет значительно увеличить расстояние между магнитами и магниточувствительным элементом. Частота счетных импульсов может преобразовываться в цифровой код с помощью накопительного счетчика или в аналоговый сигнал с помощью электронного преобразователя импульсов.
В последнее время для измерения течения были созданы микровертушки с электрическим сигналом на выходе. Микровертушки имеют индуктивные или резистивные типы преобразователей. Они используются для измерения мгновенных значений скорости потока. Так, вертушка с индуктивным преобразователем измеряет скорость течения в диапазоне 0,1—2 м/с с погрешностью 3%. Диаметр ротора у такой вертушки 10 мм.
Существующими микровертушками можно измерить скорость потока в диапазоне 0,04—10 м/с с погрешностью 2—5%. Постоянная времени вертушек равна 0,01—0,2 с.
Следует заметить, что вертушки с индуктивным преобразователем характеризуются сравнительно высокой стабильностью и чувствительностью.
Следовательно, задача определения скорости потока сводится к измерению ЭДС. Обычно же направление течения неизвестно и требует определения. В этом случае скорость течения измеряется по его проекциям на двух взаимно перпендикулярных галсах или установкой второй пары электродов перпендикулярно относительно первой. Однако этот метод, несмотря на его простоту, не нашел широкого применения из-за трудности учета влияния теллурических токов.
Измерители, использующие магнитное поле Земли, обычно применяются для измерения только поверхностных течений. Выяснилось, что в таких измерителях скорость потока и выходной сигнал связаны сложной зависимостью, где участвует глубина, вертикальный профиль скорости, электрическая проводимость морского дна, положение буксируемых электродов. Все эти факторы трудно поддаются учету. На измеряемую скорость течения, кроме того, влияют магнитные возмущения. Точность таких измерителей обычно не превышает 20—30%, чувствительность 4—6 мВ-с/м.
Структурная схема измерителей течения с постоянным и переменным магнитными полями содержит электромагнитный генератор, измерительные электронные датчики, усилитель, детектор и регистратор. Такая схема может измерить одну составляющую вектора скорости, которая направлена перпендикулярно линии, соединяющей измерительные электроды. Для измерения другой составляющей вектора скорости необходима вторая пара электродов, расположенных перпендикулярно к первой паре. Такой измеритель регистрирует составляющие вектора скорости, лежащие в плоскости электродов.
Отсюда видно, что чувствительность измерителя зависит от магнитной индукции Вм и расстояния между электродами.
Питание постоянным током, которое применяется для регистрации низкочастотных составляющих турбулентного-потока, приводит к поляризации даже самих высокочистых электродов. Так как напряжение поляризации не является постоянной величиной, а меняется во времени, то это ограничивает точность измерений. Чтобы избежать этого, обмотку возбуждения питают переменным током. В этом случае электрический сигнал, соответствующий скорости потока также будет переменным.
Питание переменным током предполагает обычно усиление сигнала на несущей частоте с использованием метода балансной Модуляции. По сравнению с амплитудной модуляцией метод балансной модуляции позволяет существенно расширить динамический диапазон.
Эта ЭДС зависит от магнитного потока и времени его изменения. При неизменном потоке с увеличением частоты уменьшается время
его изменения. Таким образом, с ростом частоты при неизменном потоке индуцированная ЭДС растет пропорционально увеличению частоты.
При этом следует учитывать, что повышенная частота питающего тока потребует большую точность компенсации ЭДС, что часто связано со значительными трудностями. Для питания датчика следует брать ток меньшей частоты. Практика показывает, что оптимальной оказывается частота 50 Гц. При этой частоте удается создать компенсацию, обеспечивающую регистрацию начальной скорости в 1 см/с с заданной точностью.
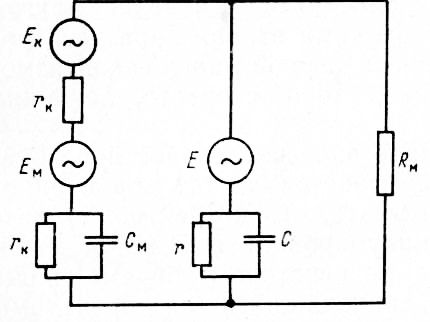
Рис. 1. Эквивалентная схема электромагнитного измерителя течений.
Весьма серьезные требования предъявляются к электродам датчика. Электроды в морской воде подвержены загрязнению и окислению, что вызывает изменение электрических параметров и возникновение ложного сигнала скорости.
Рассмотрим эквивалентную схему работы электродов датчика. Показаны три генератора, включенные по смешанной схеме. Генераторы ЭДС Ем и Е включены параллельно, так как их напряжения возникают в одном и том же объеме воды, заключенном между электродами. Генератор ЭДС компенсации Ек включен последовательно с генераторами ЭДС Ем и Е. Полная компенсация возможна в том случае, если напряжения генераторов ЭДС Ем и Е строго одинаковы, а их фазы сдвинуты на 180°. Практически же такого равновесия достичь невозможно из-за различных импедансов этих генераторов. Внутреннее сопротивление их является активно-емкостным, а генератор ЭДС Ек имеет практически только активную нагрузку. Следовательно, если произойдет изменение одного из параметров такой комплексной цепи, то появится ложный сигнал скорости из-за нарушения работы схемы компенсации. Составляющие могут меняться из-за окислительных процессов, загрязнения, абсорбции газа на их поверхности. При изменении соотношения сопротивлений меняется фаза сигнала, и это приводит к нарушению работы схемы компенсации.
Следовательно, в процессе измерений течений необходимо обеспечить минимальные изменения электрических параметров цепей, образуемых электродами. С этой целью применяют платиновые электроды. Такие электроды в процессе работы меняют свои электрические параметры минимально. Так, пара электродов из платины размером 20×40 мм обеспечивает минимальный ложный сигнал скорости, не превышающий ±0,3 см/с, тогда как такие же электроды из серебра создают ложный сигнал скорости до ±4 см/с.
Следует отметить, что магнитное поле, создаваемое электромагнитным датчиком, довольно быстро затухает в периферийном объеме воды. Это приводит к тому, что осреднение скорости потока происходит в относительно малом слое воды, расположенном над электродами датчика. Экспериментально установлено, что датчик регистрирует среднюю скорость в объеме воды в виде цилиндра, диаметр которого равен расстоянию между электродами и высота 10 см. У края цилиндра сигнал падает относительно слоя воды непосредственно над электродами в 20 раз.
Динамический диапазон электромагнитного измерителя скорости зависит в основном от гидравлической характеристики датчика. Гидравлическая же характеристика датчика определяется его формой. Экспериментально показано, что датчик в виде плоского цилиндра диаметром 200 мм и высотой 70 мм регистрирует скорости течения от 1 до 216 см/с.
Основным препятствием к применению электромагнитных измерителей, использующих переменное магнитное поле, является сравнительно большое потребление энергии. Это всегда ограничивало их использование в автономных приборах, применяемых для длительных измерений. Кроме того, истинность измеряемой скорости потока зависит от гидродинамических свойств датчика. Поскольку обтекающая датчик вода используется как проводник, любое возмущение ее вносит искажения в измерения. Однако многие из недостатков удалось преодолеть фирме «Интероушен», которая создала электромагнитный измеритель скорости весьма высоких характеристик. Он измеряет также температуру, электропроводимость и давление. Информация хранится в твердотельной памяти емкостью до 256 килобайт.
Взаимодействие акустического и оптического полей с потоком воды позволяет проводить измерение скорости течения с высокой точностью и чувствительностью. Этот метод особенно широко используется при изучении процессов турбулентности и измерении малых скоростей течений. Практически используются акустические измерители течений, действующие на принципе измерения скорости прохождения звуковых волн между излучателем и приемником. Имеют применение приборы для измерения течений, использующие эффект Доплера. Они используются для измерения мелкомасштабной турбулентности. Используются также фазовый и фазо-импульсный принципы.
Акустический и оптический методы измерения течений обычно подразделяются на доплеровский и фазовый. Из-за высокой частоты излучения оптические измерители могут иметь высокую разрешающую способность и чувствительность. Однако обычно относительные погрешности и паразитные эффекты в оптических измерителях остаются такими же, как и в акустических.
В акустических измерителях в качестве датчика скорости потока служат приемный и излучающий кристаллы, которые ориентируются по направлению течения. Измерение скорости прохождения акустических сигналов осуществляется импульсным или фазовым методами. Поскольку фазовый метод имеет малый динамический диапазон, он чаще всего используется в лабораторной аппаратуре. Импульсный метод, наоборот, нашел применение в акустических измерителях течений.
Первичным датчиком в данном приборе служат два одноходовых измерителя скорости звука, в которых направления передачи импульса противоположны. Направление передачи акустических импульсов совпадает с направлением течения. Один датчик измеряет сумму скоростей потока и звука, а другой измеряет разницу между этими двумя скоростями. Разность во времени прохождения акустических импульсов оказывается пропорциональной скорости течения и мало зависит от изменений скорости звука.
Структурная схема импульсного измерителя скорости течения представлена на рис. 2.
Балансный модулятор позволяет получить сумму и разность частот вводимых в него сигналов. Применяя фильтр верхних и нижних частот, можно получить сигналы, пропорциональные скорости потока и скорости звука соответственно.
Принцип действия измерителей течения, основанных на эффекте Доплера, заключается в следующем. При излучении ультразвуковых колебаний в неоднородной жидкости они рассеиваются неоднородностями среды и частично возвращаются к излучателю. Этот сигнал объемного отражения благодаря эффекту Доплера имеет частоту, отличающуюся от первоначально излученной, если перемещение неоднородностей жидкости полностью или частично совпадает с осью акустического излучения.
Акустический измеритель течения, использующий эффект Доплера, представляет собой акустический передатчик, излучающий энергию узкой диаграммной направленности, акустическое устройство, принимающее сигналы объемного отражения, и смеситель, выделяющий разностную частоту из суммы частот посылаемого и принимаемого сигналов. Разностная частота и определяет скорость течения.
Считается, что центры рассеивания перемещаются вместе с потоком воды. Поскольку рассеивание увеличивается пропорционально четвертой степени частоты, в качестве рабочих частот выбраны 2,5 и 10 мГц. При частоте 10 мГц количество центров рассеивания, равных или больших длины волны (Л = 0,15 мм), достаточно велико.
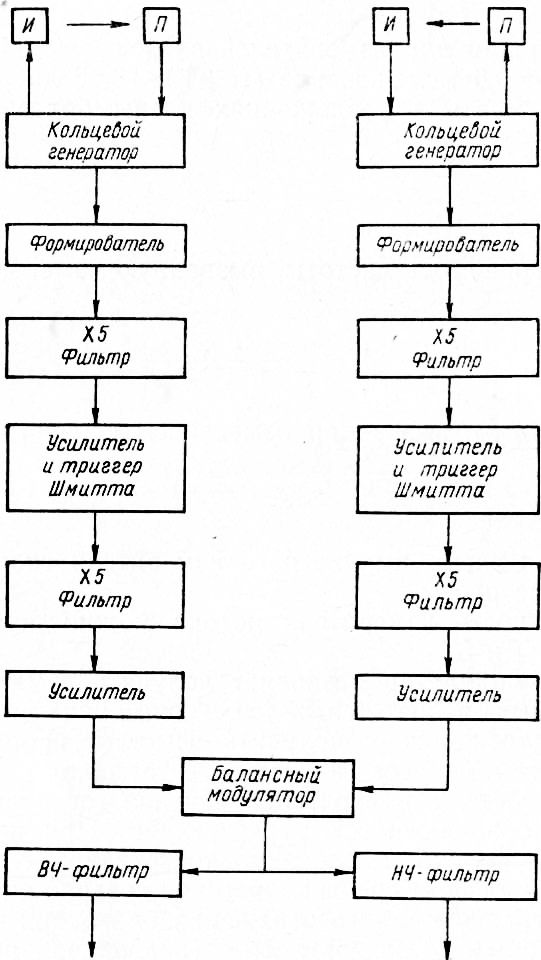
Рис. 2. Блок-схема импульсного акустического измерителя течений.
Для регистрации вихрей используются либо термодатчики, либо датчики давления. В последнее время существует метод модуляции вихрями акустического и лазерного луча, пересекающего дорожку Кармана. Вихревые измерители скорости имеют сравнительно высокий порог регистрируемой скорости, составляющий 5—10 см/с. Однако вихревые измерители критичны к положению измерителя в горизонтальной плоскости — частота образования вихрей зависит от вращения прибора в горизонтальной плоскости. Это может занижать результаты измерений на 20—25%.
Взаимодействие теплового поля с потоком также дает возможность измерить скорость течения. Этот метод измерения известен как термоанемометрический.
Скорость потока определяют по изменению тока.
Измерение скорости течения термоанемометрами обычно выполняют двумя способами.
В первом способе обеспечивается постоянство тока, протекающего через чувствительный элемент. В этом случае температура, а значит, и сопротивление чувствительного элемента зависят от скорости потока.
Во втором способе постоянной поддерживается температура чувствительного элемента, а значение тока зависит от скорости потока.
Наибольшее распространение получили термоанемометры, в которых постоянной поддерживается температура. Структурная схема такого прибора приведена на рис. 27.
Чувствительный элемент — сопротивление — включается в одно из плеч измерительного моста. Другим плечом моста является компенсационная пленка с сопротивлением RK, расположенная на одной базе с чувствительным элементом. Компенсационная пленка предназначена для компенсации влияния изменения температуры потока. Площадь компенсационной пленки много больше площади чувствительного элемента, поэтому она практически не нагревается.
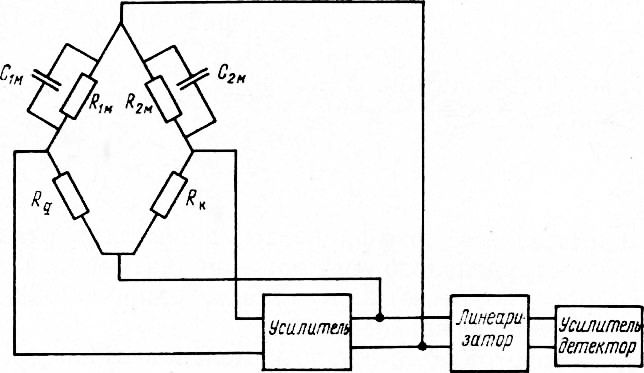
Рис. 3. Блок-схема термоанемометра с постоянной температурой.
В структуру прибора введен линеаризатор, который предназначен для формирования линейной зависимости UBbiX=f(V). Перед измерениями скорости течения мост балансируется и задается температура перегрева. В процессе измерения скорости течения температура чувствительного элемента будет выше температуры окружающй среды.
Далее сигнал скорости потока и пульсационных составляющих усиливается и детектируется.
В качестве источника питания датчика проволочного или пленочного типа используются источники постоянного или переменного тока. Балластное сопротивление обеспечивает неизменность протекающего через датчик тока при изменении условий его охлаждения и соответственно изменении скорости потока. Сигнал с датчика усиливается и поступает на корректирующую схему, после чего напряжение, пропорциональное скорости, идет на регистратор. Корректирующая схема расширяет частотный диапазон и сглаживает неравномерность частотной характеристики датчика в области высоких частот. Это позволяет добиться увеличения частотного диапазона измерения спектра течений на два порядка.
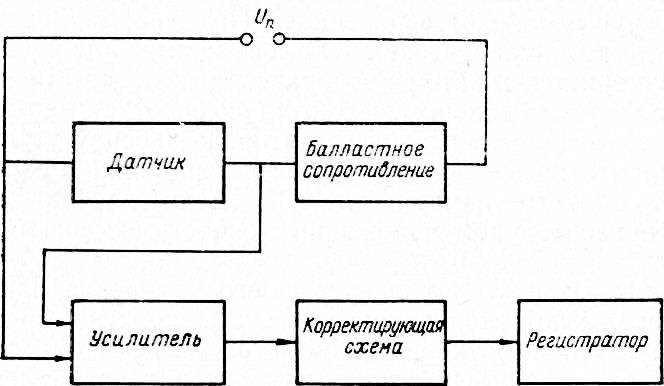
Рис. 4. Блок-схема термоанемометра с постоянным током.
Такой измеритель позволяет регистрировать изменение скорости течения в широком диапазоне частот и может измерять большие значения скоростей. Его информативность практически не зависит от средней скорости потока. Термоанемометр способен измерять скорость течения в диапазоне от 0,02 м/с до 15 см/с с погрешностью 2—5%. Его недостаток — зависимость результатов измерений от степени загрязнения чувствительного элемента. Он также обладает значительной нелинейностью градуировочной характеристики. На результаты измерений оказывает влияние и конструктивное выполнение датчика.
Определение направления течения производится гироскопическим или магнитным способом. Преимущественно используется магнитный способ. В основе магнитного способа лежит измерение угла между направлением магнитного меридиана и направлением горизонтальной составляющей вектора скорости течения. Такие датчики направления отличаются экономичностью и малыми габаритами. Магнитные датчики направления обеспечивают при долговременной работе точность ±(2—3)°.
При использовании измерителей скорости с винтовыми и вер-гушечными датчиками необходимо, чтобы прибор ориентировался в потоке. На корпусе прибора в этом случае устанавливаются рули или направляющие плоскости. Отсчет угла поворота компасной картушки относительно азимутального кольца производится с помощью электромеханических, потенциометрических и фотоэлектрических преобразователей угла поворота датчика в аналоговый или кодовый сигнал.
В последнее время начали использоваться феррозондовые датчики магнитного меридиана. Датчик выполнен в виде нескольких (обычно двух) взаимно перпендикулярных обмоток, расположенных на ферромагнитном сердечнике. Под действием магнитного поля Земли возникает вторая гармоника, пропорциональная Н, которая измеряется и затем преобразуется в кодовый сигнал. Обе ортогонально расположенные обмотки создают сигналы, один из которых пропорционален синусу, а второй — косинусу угла разворота датчика относительно магнитного меридиана. Разрешающая способность такого измерителя 0,1°. Если датчик находится в строго горизонтальном положении, точность измерения составит около 2°.
В аналоговых системах непрерывного измерения направления течения используют скользящие контакты, движущиеся по непрерывной круговой намотке потенциометра с тремя отводами. Разрешающая способность по углу в измерителях направления с по-тенциометрическим выходом составляет 0,5—2°, а точность измерения 3—10°.
Разновидностью преобразователя с потенциометрическим выходом является компас с жидкостным электролитическим преобразователем. В нем картушка помещена в раствор электролита, и ее угловое положение соответствует выходному электрическому сигналу. Преимуществом такого измерителя является отсутствие подвижных механических контактов.
В компасах с цифровым выходом коды сигнала направления формируются специальными кодирующими дисками и устройствами считывания. Наибольшее распространение имеет диск с нанесенным на нем фотографическим способом кодом Грея. Считывание происходит с помощью миниатюрных фотодиодов. Преимущество кода Грея перед двоичным кодом состоит в однозначности считываемой информации. При использовании двоичного кода при переходе границы от нуля к единице возможна неопределенность считывания в нескольких разрядах, даже при небольшой неточности установки линейки датчиков считывания. Цифровые компасы с кодом Грея обеспечивают разрешение 1,4—1,8° при использовании 8-разрядных кодов.
Рассмотрим далее принципы построения приборов, предназначенных для измерения скорости и направления течений.
В зависимости от способа применения приборы для измерения течений делятся на две группы:
— приборы, предназначенные для длительных измерений скорости и направления течений на автономных буйковых станциях, автономных донных станциях, на неподвижных основаниях;
— приборы, предназначенные для измерения скорости и направления течения на ходу судна.
Первая группа измерителей течений в продолжение многих суток непрерывно регистрирует показания датчиков. Следовательно, эта группа приборов должна быть прежде всего обеспечена надежным питанием на длительный период времени. Датчики скорости и схемы преобразования сигнала должны быть экономичными по питанию.
Приборы для долговременных измерений чаще всего компонуются в цилиндрических прочных корпусах, изготовленных из немагнитных материалов. В последнее время начинают применяться прочные корпуса, имеющие сферическую форму. Нормальное положение прибора — вертикальное. Для измерения течений используются два варианта подвески приборов в составе автономной буйковой станции. Вариант свободно ориентирующегося прибора предполагает их подвеску на вертлюгах к специальным рамам. Прибор имеет специальное хвостовое оперение, стабилизирующее его по потоку. Очень важно, чтобы прибор имел заметную отрицательную плавучесть в воде. При больших вертикальных перемещениях, возникающих в результате поверхностного волнения, приборы сильно отклоняются от вертикали, что приводит к значительному искажению результатов измерений. Основные сложности, как правило, существуют в поверхностном слое, где влияние поверхностного волнения значительно. По-видимому, в этом слое целесообразно применять приборы с горизонтальной ориентацией корпуса. Скорость течения и угол наклона троса в этом случае не влияют на положение корпуса, вертикальные перемещения буя также мало искажают результаты измерений. Вариант свободно ориентирующегося прибора предполагает его установку в разрыв несущего троса.
В зависимости от способа применения измерителя течений выбирается и тип датчика. Так, для приборов первой группы применяются датчики, которые используют энергию течений. Это позволяет существенно повысить автономность прибора. Чаще всего используются роторные датчики различных вариантов исполнения. В последнее время стали применяться акустические датчики измерения скорости течения (прибор S-2 фирмы «Нейл Браун»),
Электромагнитные и термоанемометрические датчики скорости в приборах, предназначенных для долговременных измерений, ранее не применялись. Их использовали для изучения турбулентных процессов и при измерении течений, имеющих скорость до 2— 3 см/с. Тем не менее один из последних измерителей течений фирмы «Интероушен» S-4 предназначен для буйковой станции.
В измерителях течения с роторными датчиками скорости вращение ротора обычно преобразуется редуктором в угол поворота потенциометра или кодовых дисков.
Кодовые диски иногда выполняются в виде клише, с помощью которого в момент отсчета производится отпечаток результата измерений. Кодовые диски типа «кода Грея» преобразуют угол поворота диска непосредственно в цифровой код.
Используются также механические системы преобразования измеренных данных в импульсный код, который регистрируется на бумажной ленте.
Известно использование системы преобразования, в которой с помощью электромагнитных контактов число оборотов ротора преобразуется в электрические импульсы, которые затем подсчитываются специальной пересчетной схемой.
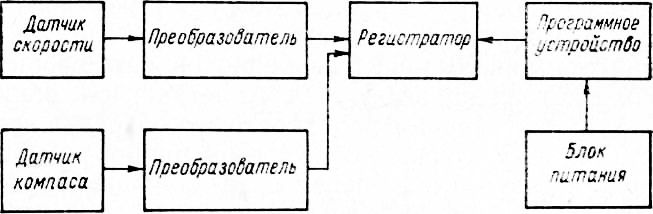
Рис. 5. Блок-схема измерителя течения с корпусом, ориентируемым по течению.
По характеру представления данных измерений приборы делятся на две группы: приборы с автономной регистрацией и приборы с дистанционной передачей данных.
В современных приборах с автономной регистрацией данных используются электронные схемы регистрации на магнитной пленке в цифровом коде и реже в аналоговом виде. Иногда используется фоторегистрация на пленке в виде кода Грея.
В настоящее время появились первые разработки запоминающих устройств с твердотельной памятью. Такие запоминающие устройства следует признать весьма перспективными.
В приборах с дистанционной передачей данных информация передается в виде аналоговых сигналов, а также в виде цифрового или время-импульсного кода.
Все многообразие существующих измерителей течений может быть сведено к четырем структурным схемам.
На рис. 5 приведена структурная схема измерителя течений, у которого корпус ориентируется по направлению потока. Измерительная часть состоит из датчика скорости и компаса. Число оборотов датчика скорости за фиксированный интервал времени преобразуется в код и подается на регистратор. Информация с датчика направления потока, который фиксирует угол между направлением течения и положением стрелки компаса, также преобразуется в код и подается на регистратор. Управление циклами измерения и записи осуществляется с помощью программного устройства, в качестве которого используются часовой механизм или кварцевые часы. Источником энергии служат сухие батареи.
На рис. 6 приведена структурная схема измерителя течений, у которого корпус не ориентируется по направлению течения. Для определения направления течения используются флюгер и соответствующий преобразователь угла в электрический кодовый сигнал.
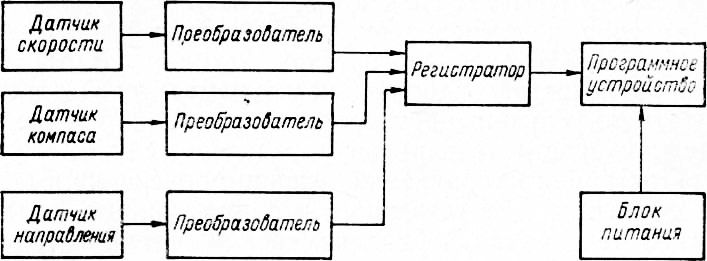
Рис. 6. Блок-схема измерителя течений с корпусом, не ориентируемым по течению.
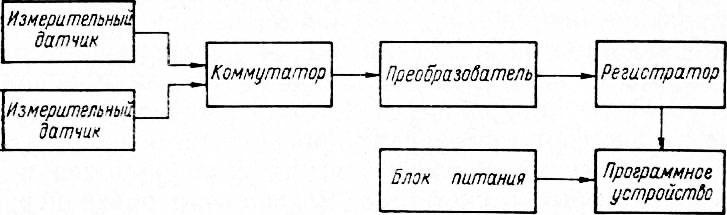
Рис. 7. Блок-схема измерителя течений с коммутатором каналов.
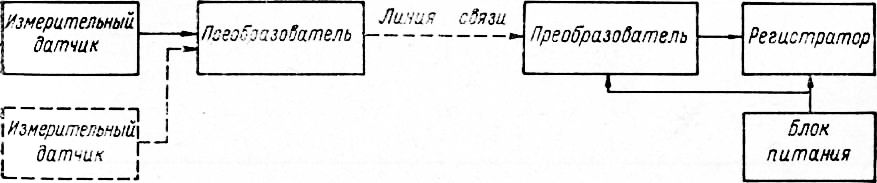
Рис. 8. Блок-схема измерителя течений с передачей информации.
На рис. 7 приведена структурная схема измерителя течений, в котором сигналы от датчика скорости и направления течения подаются через коммутатор каналов на общий преобразователь и затем на регистратор.
Наконец, на рис. 8 приведена структурная схема измерителя течений с дистанционной передачей информации. Программа работы измерителя задается специальным программным устройством, которое находится на месте регистрации информации.
Следует заметить, что в последнее время появилась тенденция совмещать в одном приборе данные о течении и другие гидрологические параметры, например температуру или электропроводимость. Такой комплекс измерителей гидрологических параметров способен собрать исключительно ценные данные в единое время. Примером могут служить измеритель течения, температуры и электропроводимости АЦИТТ, созданный в ААНИИ, и «Поток», измеряющий течение и температуру, разработанный и выпускаемый мелкосерийно ОКБ океанологической техники ИОАН СССР.
Одним из недостатков большинства измерителей течений следует считать то, что они производят регистрацию среднего значе- : ния модуля скорости течения за определенный промежуток времени, а регистрация направления течения происходит в виде мгновенного значения. Естественно, что возможные отклонения направления течения за период измерения остаются не отмеченными. Поэтому возникла необходимость измерения среднего значения направления течения.
Скорость течения — векторная величина, она может быть представлена в системе координат либо полярной, либо декартовой. Интегрирование направления течения за период измерения, когда скорость представлена в полярной системе координат, представляется весьма сложным. Задача упрощается, если использовать декартову систему координат, в которой скорость течения представлена в виде соответствующих проекций на оси.
Примером такого измерителя течений может быть прибор ЦИИТ, успешно использовавшийся в ряде крупных морских экспедиций ИОАН СССР.
Рассмотрим далее несколько важных вопросов, касающихся метрологических характеристик измерителей течений.
В условиях лабораторного эксперимента измерители течений различных типов обеспечивают практически одинаковые показания скорости. В реальных же условиях возникает ряд помех, определяемых непосредственным влиянием поверхностных волн, а также движением заякоренного буя под воздействием волн, течения и ветра. В результате измерители совершают сложные вынужденные колебания: колебания относительно направления потока, возвратно-поступательные движения в вертикальной плоскости, движения, вызываемые наложением на поле скорости течений проекций орбитальной скорости частиц воды на горизонтальную плоскость. Взаимодействие истинного течения со скоростью VT с волновым компонентом скорости VB приводит к тому, что результирующая скорость постоянно меняется по модулю и направлению синхронно с периодом волн.
Волновой компонент скорости VB при регистрации должен быть, следовательно, исключен.
Среди механических датчиков скорости течения существуют так называемые реверсивные, которые способны исключать волновой компонент автоматически за счет конструктивных особенностей.
В знакопеременном потоке такие датчики скорости имеют возможность вращаться в обе стороны. Нереверсивные датчики в знакопеременном потоке будут давать искаженные значения модуля скорости. Поэтому для измерений течения в таких условиях применять их не рекомендуется.
Как показали исследования, механические датчики течения пропеллерного типа с горизонтальной осью вращения обеспечивают наиболее качественные показания при измерении скорости в поверхностном слое в условиях волновых помех.
Датчики роторного типа, имеющие вертикальную ось вращения, целесообразно применять при измерении течения на глубинах, где не сказывается влияние поверхностного волнения, или на буйковых станциях с притопленными буями.
Колебания измерителя течений относительно направления потока, как показали исследования, приводят к существенным искажениям истинной скорости потока. Как было установлено, погрешность в измерении скорости в значительной мере определяется углом рыскания прибора — величиной и знаком. Исследования проводились с корпусом самописца БИВ. Однако полученные результаты могут быть распространены в какой-то мере и на другие типы приборов, в которых используются механические датчики скорости, ограждаемые от повреждений однотипными конструктивными элементами. Уменьшение числа опор ограждения датчика с фронтальной части заметно снижает погрешность в измерениях. Требуется серьезная конструктивная проработка ограждения датчика скорости с учетом проведенных лабораторных исследований. Обычно влияние ограждения учитывается при градуировке в бассейне.
Вертикальные колебания измерителя течений, определяемые поверхностным волнением, также существенно искажают истинные данные о течении. Вертикальные колебания могут быть как самого измерителя течения, так и потока воды относительно неподвижного прибора, так и одновременные смещения в вертикальной плоскости самого прибора и потока воды. Во всех случаях возникает вертикальная составляющая скорости.
Как было установлено экспериментально, различные типы измерителей течений в разной степени реагируют на вертикальные колебания. Так, например, прибор БПВ-2 практически не реагирует на вертикальное перемещение, в то же время прибор БПВ-2р вносит существенные погрешности в измерения.