Механические рулевые приводы. Все
суда (за исключением некоторых несамоходных) независимо от назначения оборудуют рулевыми устройствами, обеспечивающими их управляемость. Рулевое устройство состоит из рулей или поворотных направляющих насадок; рулевого привода, связывающего баллер (вал поворота руля) с рулевой машиной; рулевой машины и средств управления ею.
Согласно требованиям Речного Регистра РСФСР рулевые устройства должны иметь основной и запасной приводы. Время поворота насадок или перекладки руля с одного борта на другой на угол 35 ° с помощью основного рулевого привода (при максимальной скорости судна) не должно превышать 30 с. У судов на подводных крыльях и воздушной подушке рулевые приводы обеспечивают перекладку рулей на угол 35 ° в течение 15 с. При перекладке руля или насадок с одного борта на другой на угол 20 ° (со скоростью переднего хода судна 0,6 максимальной и осадке его по грузовую ватерлинию) с помощью запасного рулевого привода время перекладки должно быть не более 60 с.
В зависимости от принятой схемы соединения рулевой машины с баллером различают приводы механические, электрические и гидравлические. Выбор привода определяется типом, размерами, конструкцией и назначением судна. Механические приводы могут быть с гибкой связью (канатные, цепные) и валиковые. Механические приводы с гибкой связью из-за невысокого к. п. д. и незначительных вращающих моментов на баллере применяют в основном на судах небольшой мощности. Поворот баллера и связанного с ним сектора в таких приводах обеспечивается тяговым органом, состоящим из гибких участков (цепей или стальных канатов), направляющих роликов и прямых стержней с ползунами. На участке 8 цепь (канат) наматывается на барабан рулевой машины. Концы гибкой связи уложены в специальные канавки сектора и закреплены штырями. При вращении штурвала поворачиваются в соответствующую сторону сектор, баллер и связанный с ним руль. Динамические нагрузки на привод (удары волн о руль и др.) компенсируются пружинами.
В состав механического валикового привода входят несколько шарнирно соединенных валиков, редуктор и конические зубчатые шестерни. Для уменьшения потерь на трение и повышения к. п. д. валиковый привод монтируют в подшипниках качения. От рулевой машины со штурвалом 8 вращение валиков через конические шестерни, редуктор и цилиндрическую шестерню передается зубчатому сектору. Последний воздействует на пружинные амортизаторы и поворачивает румпель, закрепленный на баллере руля или поворотной насадки. Валиковые рулевые приводы применяют на судах при вращающих моментах на баллере до 4 кН-м.
Электрические и гидравлические приводы. Электрические рулевые приводы с расположением рулевой машины на корме (в румпельном отделении) выполняют секторными. Область их применения ограничивается значениями вращающего момента на баллере до 150 кН-м.
Наибольшее распространение на судах получили секторные машины двух типов: у первого типа основной и запасной приводы соединяются с зубчатым сектором каждый через свой редуктор, у второго — через общий червячно-планетарный редуктор (дифференциал Фе-дорицкого).

Рис. 1. Рулевой привод с гибкой связью

Рис. 2. Схема валикового рулевого привода

Рис. 3. Рулевой привод с червячно-планетарным редуктором
В приводах второго типа основной электродвигатель через редуктор вращает цилиндрическую шестерню, входящую в зацепление с зубчатым сектором. Сектор, посаженный на баллер, свободно поворачивает его через пружинные амортизаторы и румпель, закрепленный на баллере шпонкой.
Редуктор состоит из двух самотормозящих червячных передач, соединенных вертикальными коническими шестернями, свободно посаженных на поперечине. Червячные шестерни, выполнены заодно с горизонтальными коническими шестернями, посажены свободно на вертикальный вал, скрепленный с поперечиной. Червяк связан с валом
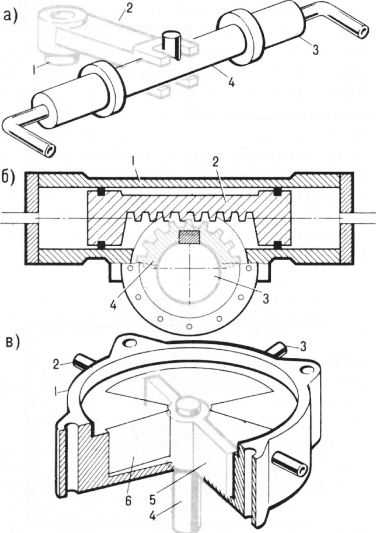
Рис. 4. Гидравлические рулевые привод электродвигателя основного привода,
Основной особенностью червячно-планетарного редуктора является то, что вращение от двух приводных электродвигателей на шестерню можно передавать как попеременно, так и одновременно с одинаковой и различной скоростями без каких-либо переключений. При работе основного привода (электродвигателя 7) червячная передача, приводит во вращение конические шестерни, которые перекатываются по верхней горизонтальной конической шестерне, остающейся неподвижной вследствие тормозящих свойств червячной передачи. Поперечина при этом поворачивается в горизонтальной плоскости и вращает вертикальный вал с шестерней.
При включении запасного привода получает вращение червячная передача, а передача остается неподвижной. Шестерни будут вращать вал, перекатываясь по нижней конической шестерне.
Если включить обе передачи с одинаковой частотой вращения и в одном направлении, то конические шестерни вращаться относительно поперечины не будут, а редуктор как одно целое будет вращать вал с передачей удвоенной мощности. При вращении валов электродвигателей в противоположные стороны с одинаковой частотой вращения поперечина останется неподвижной, и перекладка руля (насадки) прекращается.
Электродвигателями управляют из рубки с помощью рукояток основного и запасного приводов. Угол перекладки руля на борт определяется по прибору, называемому аксиометром. Автоматическая остановка электродвигателей при крайних положениях пера руля обеспечивается с помощью конечных выключателей, размыкающих их цепи питания. Привод к выключателям обычно выполняют в виде цепной передачи со звездочками, закрепленными на валу. Предельный угол поворота сектора относительно диаметральной плоскости судна ограничивается специальным упором, укрепленным в корпусе судна.
Значительное распространение на судах в последние годы получили гидравлические рулевые приводы. Для передачи больших мощностей на баллер используют гидравлический плунжерный (поршневой) рулевой привод. Румпель в таких приводах шарнирно соединен с плунжером, который может перемещаться в двух гидроцилиндрах. При нагнетании масла под давлением в один из цилиндров с одновременным отсасыванием его из другого цилиндра плунжер смещается в ту или иную сторону и поворачивает баллер. На серийных судах с гидравлическими рулевыми машинами типа РГ используются плунжерно-реечные приводы. Особенность их устройства заключается в объединении двух соосных гидроцилиндров в один, называемый моментным, с общим двусторонним плунжером. В средней части плунжер имеет вырез с зубчатой рейкой, которая входит в зацепление с шестерней, насаженной на баллер. При подаче масла в ту или иную полость гидроцилиндра плунжер поворачивает шестерню и баллер в соответствующую сторону.
Наиболее простую и компактную конструкцию имеют лопастные гидравлические приводы. Исполнительным механизмом в таких приводах является двух- или трехлопастной гидродвигатель, который состоит из лопастей, скрепленных с баллером, и цилиндрического корпуса/с радиальными перегородками.
Лопасти и радиальные перегородки разделяют корпус гидродвигателя на несколько полостей (в данном случае на четыре), соединенные трубопроводами, через соответствующий переключатель режимов с электроприводным насосом. Если, например, рабочая жидкость давлением 4—5 МПа поступает в гидродвигатель по трубопроводу, баллер руля поворачивается против часовой стрелки до упора лопастей в радиальные перегородки.
При изменении положения переключателя рабочая жидкость нагнетается в гидродвигатель по трубопроводу и баллер руля поворачивается по часовой стрелке. Чтобы исключить утечки рабочей жидкости из одной полости гидродвигателя в другую, торцы лопастей и радиальных перегородок выполнены с уплотнениями из масло-стойкой резины.
Ручные гидравлические машины. По роду используемой энергии рулевые машины обычно подразделяют на ручные, электрические и гидравлические. Ручные рулевые машины применяют на небольших судах, где они являются основным средством управления. На крупных судах их используют в качестве запасного привода. Ручные рулевые машины с гибкой связью имеют штурвальное колесо и горизонтальный вал с барабаном для каната (штуртроса). В большинствве случаев ручные рулевые машины компонуют с валиковой проводкой. Основным узлом такой машины является также штурвальное колесо с горизонтальным валом. При вращении штурвального колеса через систему конических шестерен, шарниров и валиков поворачивается в соответствующую сторону и баллер руля.
Электрические рулевые машины установлены на многих теплоходах, причем оба привода (основной и запасной) могут быть электрическими или только основной привод электрическим, а запасной — ручным.
Большое распространение на судах всех типов и размеров получили гидравлические рулевые машины. Их подразделяют на гидроручные, гидравлические с приводом от главных дизелей и электрогидравлические. Принципиальная схема одной из гидроручных рулевых машин показана на рис. 5. Рабочая жидкость в цилиндры плунжерного привода подается с помощью аксиально-поршневого насоса, встроенного в штурвальную колонку, расположенную в рубке. Насос приводится во вращение через зубчатую передачу при вращении штурвального колеса. От насоса рабочая жидкость в зависимости от направления вращения штурвального колеса поступает в полость клапанной коробки (гидрозамка). Если, например, на поршень гидрозамка будет воздействовать давление снизу, как показано на рис. 5, то левый гидроцилиндр сообщится с нагнетательным трубопроводом насоса, а правый — со всасывающим. Плунжеры гидропривода сместятся вправо, и румпель повернется по часовой стрелке.
При повороте штурвального колеса в другую сторону под воздействием давления окажется правый гидроцилиндр, из-за чего произойдет поворот румпеля в противоположном направлении. Когда штурвальное колесо не вращается, рабочая жидкость в цилиндрах запирается шариковыми клапанами гидрозамка и руль оказывается неподвижным. Во избежание перегрузок и поломок машины, возможных при ударах волн о перо руля, задевании руля за грунт и т. д., в систему гидропривода включены два предохранительных клапана. Заполнение системы маслом производят через клапан. Корпус насоса имеет несколько цилиндров и получает вращение от приводного вала. Поршни насоса выполнены в виде плунжеров, опирающихся под действием пружин своими сферическими концами на шайбу. При вращении вала вместе с ним вращается и шайба, установленная под некоторым углом к оси вала, а плунжеры в этом случае совершают прямолинейное возвратно-поступательное движение в сторону шайбы и обратно. Ход поршней, а следовательно, и подачу насоса можно регулировать путем изменения угла наклона шайбы по отношению к оси вала. В гидроручных машинах применяют, как правило, насосы с постоянной подачей, поэтому угол наклона шайбы в них не изменяется. Как показано на рис. 6, плунжеры, находящиеся при вращении вала в верхней части насоса, движутся к шайбе, при этом происходит всасывание рабочей жидкости в полости а. Плунжеры, сместившиеся в нижнюю часть насоса, при движении влево вытесняют рабочую жидкость из полостей е. Распределение жидкости осуществляется через серпообразные окна в и г в неподвижном опорно-распределительном диске, связанном трубопроводами с гидрозамком привода. Причем при вращении блока цилиндров вместе с валом по часовой стрелке через окно рабочая жидкость будет поступать в насос, а через окно д нагнетаться в магистраль. При изменении направления вращения вала (штурвального колеса), наоборот, через окно д рабочая жидкость будет поступать в полости цилиндров, а через окно б нагнетаться в гидропривод.
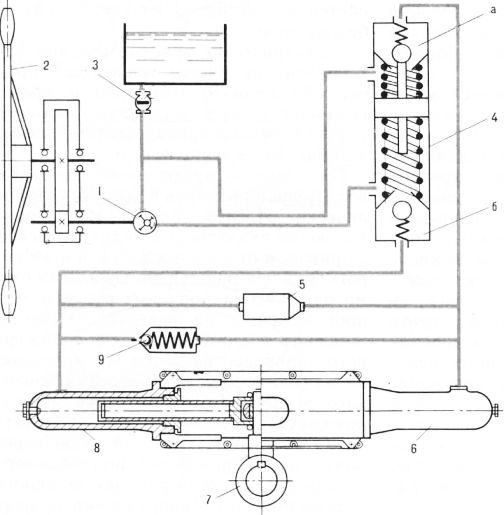
Рис. 5. Схема гидроручной рулевой машины
Гидравлические рулевые машины типа РГ. На некоторых теплоходах-толкачах, сухогрузах и пассажирских теплоходах типа «Москва» жидкость в гидросистему привода подается с помощью шестеренного насоса, приводимого в действие через клиноременную передачу от вала отбора мощности главного дизеля. При работе дизеля шестеренный насос забирает масло из бака и через обратный клапан и золотник реверса нагнетает его в один из гидроцилиндров плунжерного или плун-жерно-реечного привода. Плунжер под воздействием давления масла смещается в соответствующую сторону и через румпель поворачивает баллер. Одновременно из полости другого цилиндра масло через золотник реверса и фильтр вытесняется в бак. При включении запасного привода масло подается в гидросистему электроприводным шестеренным насосом через обратный клапан. Давление в системе контролируют по манометру, подключенному к перекидному клапану. В установленных пределах давление поддерживается с помощью предохранительно-перепускных клапанов. Для перекладки руля на правый или левый борт золотник реверса переводится в соответствующее положение с поста управления, на панели которого смонтированы также тумблер включения запасного электропривода, аксиометр, манометр и сигнальная лампа аварийного уровня в масляном баке.
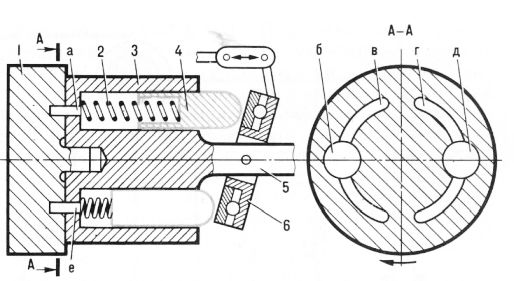
Рис. 6. Аксиально-поршневой насос
Электрогидравлические машины типа Р. Отечественные рулевые машины типизированного ряда Р11—Р22 развивают момент на баллере руля 6,3— 1600 кН-м и выполняются с двухцилиндровым (для одного руля) и четырехцилиндровым (для двух рулей) плунжерным приводом. Гидропривод таких машин оснащен аксиально-поршневым насосом типа 11Д с регулируемой подачей. Приводной вал насоса вращается и через карданную передачу вместе с валом электродвигателя приводит во вращение блок цилиндров. В цилиндрах блока размещены девять поршней, соединенных шатунами с фланцем приводного вала. Блок упирается в подшипник, закрепленный на оси люльки. С торцовой стороны между блоком цилиндров и люлькой 8 установлен золотник-распределитель, который прижимается к люльке пружиной. Люлька может поворачиваться вокруг своей оси в плоскости рисунка на цапфах (пустотелых осях). Насос включается при среднем положении люльки, когда оси блока цилиндра и приводного вала совпадают. В этом случае при вращении вала, карданной передачи и блока относительно оси поршни, вращаясь вместе с блоком, не совершают возвратно-поступательного движения. Масло в гидроцилиндры рулевого привода не подается, и руль остается неподвижным. При повороте люльки относительно цапф блок цилиндров поворачивается на некоторый угол по отношению к оси приводного вала. Поршни будут совершать возвратно-поступательное движение в цилиндрах блока. При перемещении цилиндров вниз поршни передвигаются, как показано на рис. 164, вправо. Давление масла в полостях цилиндров возрастает, и, наоборот, когда цилиндры при вращении блока поднимаются вверх, давление в их полостях падает. Следовательно, при повороте люльки по часовой стрелке масло через отверстие в верхней цапфе по каналам засасывается в цилиндры, а по каналам г через серповидное окно в вытесняется из цилиндров в полость нижней цапфы и далее в нагнетательный трубопровод.
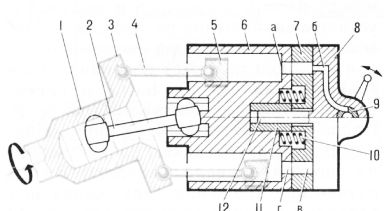
Рис. 7. Аксиально-поршневой насос 11Д
Подача жидкости к гидроцилиндрам привода рулевой машины зависит от значения угла поворота люльки. С увечением угла подача насоса и скорость перекладки руля возрастают. При повороте люльки против часовой стрелки масло из полости нижней цапфы через серповидное окно в золотника-распределителя и каналы засасывается в цилиндры блока и нагнетается из них по каналам. Руль при этом перекладывается в обратном направлении.
Кинематическая и гидравлическая схемы управления насосом показаны на рис. 9, а, б. Как отмечалось, при пуске насоса от приводного вала получает вращение блок цилиндров, а через зубчатую передачу и вал включается в работу подпиточный шестеренный насос. Направление перекладки рулей и подача насоса задаются с помощью вала управления, который поворачивается специальным механизмом электромеханического ДАУ. Максимальная подача насосов бывает при установке вала управления в ту или иную сторону на вал управления через систему рычагов и тяг воздействует на гидроусилитель, состоящий из золотника и двух силовых гидроцилиндров.
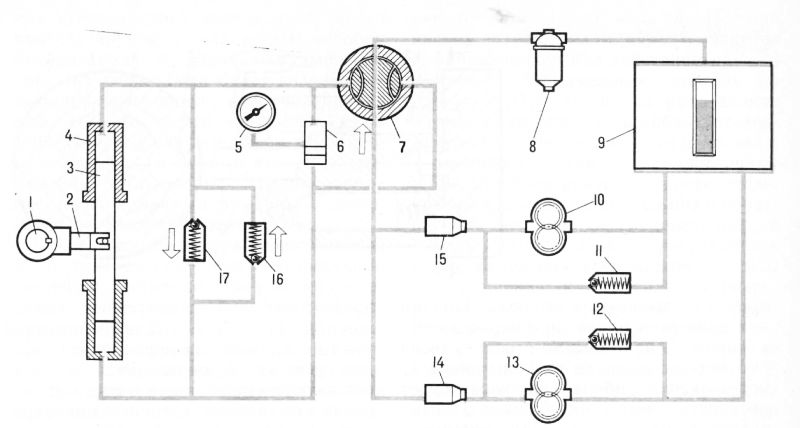
Рис. 8. Схема гидравлического рулевого привода РГ
Подпиточный шестеренный насос через фильтр подает рабочую жидкость к золотнику и в зависимости от положения последнего направляет ее в один из силовых цилиндров. Давление в полости всасывания аксиально-поршневого насоса с помощью перепускных клапанов поддерживается в пределах 0,5—0,6 МПа. Под воздействием давления жидкости в магистрали поршень одного из силовых цилиндров поворачивает люльку на соответствующий угол в заданном направлении. Одновременно из другого силового цилиндра жидкость через золотник сливается в корпус насоса. При этом тяга обратной связи возвращает золотник в среднее положение, доступ рабочей жидкости в силовой цилиндр прекращается и люлька останавливается. Поршни насоса начнут совершать возвратно-поступательное движение в блоке цилиндров, жидкость будет нагнетаться в одну из полостей гидроцилиндра и отсасываться из другой. Через привод баллера руль будет повернут на правый или левый борт. Перекладку рулей контролируют по электрическим приборам-указателям, расположенным в рубке.
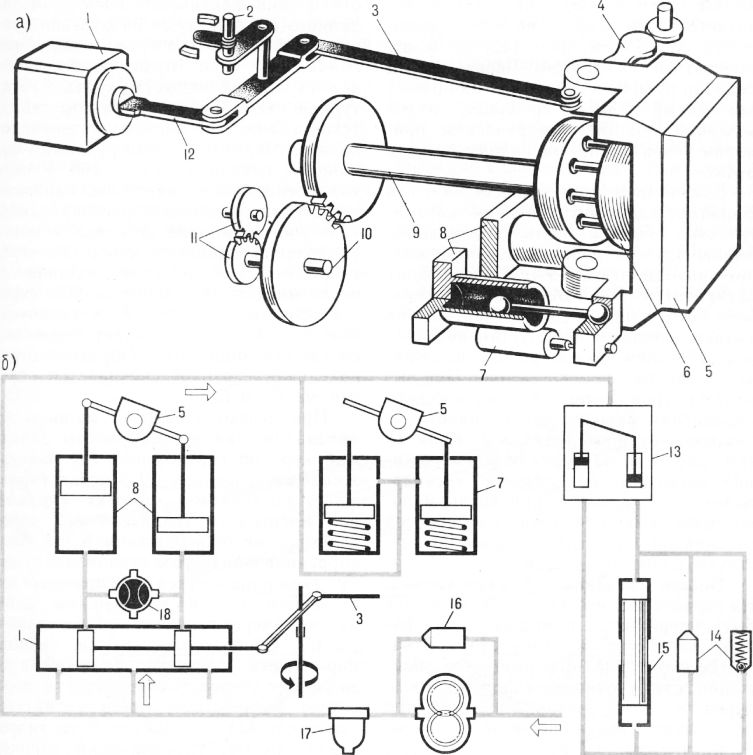
Рис. 9. Схемы управления насосом 11Д
Как только угол перекладки руля достигнет заданного значения, автоматические средства управления машины выключат электродвигатель и вращение приводного вала прекратится. Давление в нагнетательной магистрали подпиточного насоса упадет, и поршни нуль-установителя под действием пружин возвратят люльку в нейтральное положение. При выходе из строя системы автоматического управления люлька поворачивается с помощью ручного привода. Кран переключения режимов работы в этом случае устанавливают в положение, при котором полости силовых цилиндров сообщаются со сливной магистралью и не препятствуют повороту люльки.
Общие сведения об авторулевых. На заранее заданном курсе судно может быть удержано с помощью специального устройства — авторулевого. В качестве источника информации о положении судна относительно заданного курса в схеме авторулевых обычно используют гироскопические компасы.
Включенные в схему таких устройств гироскопы реагируют на поворот суд-228 на вокруг вертикальной оси и при отклонении фактического курса от заданного воздействуют на рулевой привод, с помощью которого изменяется положение пера руля относительно диаметральной плоскости судна. Структурная схема одного из авторулевых, установленных на пассажирских теплоходах с гидравлическими рулевыми машинами, показана на рис. 166. Ручное управление выполняется дистанционно по следящей системе регулирования, т. е. при установке штурвалом поста управления заданного курса. Электрогидравлическая рулевая машина Н через магнитный усилитель МУ, перестановочный редуктор Р и гидроусилитель ГУ перекладывает руль на соответствующий угол. Обратная отрицательная связь обеспечивается сельсинами С2 и СЗ.
При переходе рулевой машины на автоматический режим работы заданный курс по гирокомпасу ГК поддерживается сельсином С1. Сигнал управления поступает в обмотки управления магнитного усилителя МУ через электронные блок питания БП и блок коррекции БК. Всякое отклонение судна от заданного курса воспринимается сельсином С2, и в элементы авторулевого через гирокомпас ГК и сельсины С1, СЗ поступает сигнал, пропорциональный углу отклонения судна от заданного курса. Сельсин СЗ в этом случае воздействует через магнитный усилитель МУ и редуктор Р на гидроусилитель ГУ, управляющий подачей насоса рулевой машины, до тех пор, пока угол рассогласования между ним и сельсином С2 не станет равным нулю.
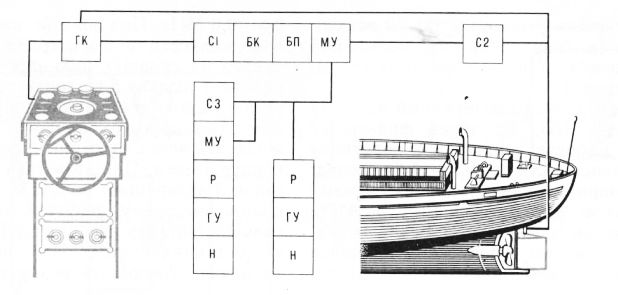
Рис. 10. Структурная схема авторулевого
Подруливающие устройства. Для улучшения управляемости при застопоренных главных дизелях, а также при малых скоростях движения ряд пассажирских и грузовых судов оборудован в дополнение к рулевым приводам еще и подруливающими устройствами. Большинство таких устройств при работе создает силу, перпендикулярную диаметральной плоскости судна. Подруливающее устройство на грузовых теплоходах проекта 507, например, состоит из дугообразной стальной трубы, лопастного насоса и электродвигателя. При включении устройства реакция струи воды, выбрасываемая насосом, отклоняет судно в направлении, противоположном движению струи. Подруливающие устройства пассажирских теплоходов проекта 1565 состоят из электродвигателя и трехлопастного насоса. Необходимый упор для маневрирования судов с таким подруливающим устройством регулируют с помощью заслонок, закрывающих отверстия в наружной обшивке судна. На рис. 167, б и в показаны положения, когда соответственно заслонки полностью закрыты и открыты наполовину. С увеличением открытия заслонок подруливающее устройство развивает большой упор и, следовательно, обеспечивается лучшая управляемость судном.
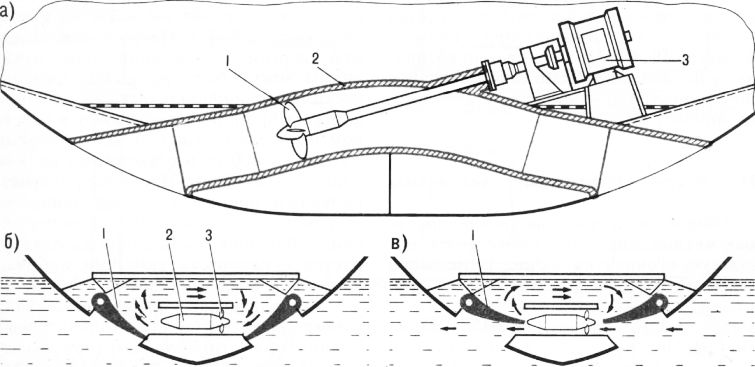
Рис. 11. Подрулировающие устройства
Правила обслуживания рулевых машин. Рулевые механизмы, как и любое другое судовое устройство, должны быть в постоянной готовности к действию. При подготовке механизмов к работе производят наружный осмотр всех креплений устройства; проверяют наличие смазочного масла в корпусах редукторов; убеждаются в отсутствии утечек рабочей жидкости в соединениях гидросистемы; определяют техническое состояние гибких связей, электропроводки, зубчатых передач и других узлов; устанавливают все клапаны, золотники в рабочее положение.
Марки рабочих жидкостей, применяемых для заполнения систем управления гидравлических машин, должны соответствовать требованиям инструкции по их эксплуатации. Для проверки исправности действия насосов их поочередно включают в работу и перекладывают руль с помощью каждого насоса в отдельности (если их два) на правый и левый борта судна. Во время перекладок руля убеждаются в наличии необходимого давления масла и согласованности показателей положения руля в румпельном отделении и на посту управления в рулевой рубке.
На судах с раздельным управлением поворотными насадками перед выходом судна в рейс проверяют надежность действия рулевого устройства при совместном и при раздельном управлении.
Обслуживание рулевой машины при работе заключается в систематическом наблюдении за техническим состоянием ее узлов и деталей, герметичностью системы, уровнем масла в расходных баках, показаниями КИП, положением клапанов, плавностью действия привода и других частей устройства.
Рулевые машины не разрешается эксплуатировать при заедании или заклинивании передачи и руля, ослаблении посадки штурвального колеса на валу, пробуксовке тормозного шкива, заедании канатов (штуртросов, цепей) в направляющих роликах и чрезмерном провисании их, разрыве проволок каната и уменьшении диаметра валиков привода сверх допустимых пределов, подтекании масла из подшипников, корпусов редукторов, сальниковых уплотнений силовых цилиндров и в соединениях трубопроводов. Нормы допустимых зазоров между деталями устройства и степень их изнашивания устанавливаются по заводским инструкциям и соответствующим формулярам. Речным Регистром РСФСР рулевые машины и устройство в целом подвергаются ежегодному очередному освидетельствованию. Техническое состояние рулевых машин при освидетельствовании указывается в акте инспектора Речного Регистра РСФСР, на основании которого судну выдается классификационное свидетельство о годности плавания в заданном районе.