Дистанционное управление главной энергетической Установкой можно считать эффективным только при условии полного освобождения судоводителя от обслуживания этой установкой, что возможно только при комплексной автоматизации дистанционного Управления.
С помощью комплексной автоматизации можно выполнять следующие функции:
— автоматический, отвечающий требованиям эксплуатации процесс управления пуском, разгоном, реверсированием и остановкой энергетической установки;
— автоматический контроль процессов работы механизмов и устранение неполадок в установке;
— самоконтроль автоматики.
Пропульсивные установки, как правило, оборудуются автоматическими устройствами сбора и обработки информации (см. раздел 6.6).
Общая структура программы управления. От автоматической системы дистанционного управления требуется, чтобы она в соответствии с заданной программой (пуск, разгон и т. д.) и с учетом рабочего состояния установки в данный момент вырабатывала определенную последовательность команд (управляющих воздействий). Для этой цели система управления осуществляет многочисленные тесты, результаты которых определяют дальнейшие ее функции. Последовательность операций такого типа называют причинным следящим (кондициональным) управлением.
Программа такой системы расчленяется на отдельные части, каждая из которых соответствует завершенным в технологическом отношении функциональным комплексам.
Каждая часть программы состоит, как правило, из нескольких ступеней (шагов), в основе которых лежит следующая структура:
— При поступлении командного входного сигнала, например в начале движения, или сообщения о завершении определенной ступени программы, с помощью так называемых первичных критериев прежде всего проверяются предварительные технологические условия допустимости следующего шага программы.
— Если первичные критерии выполнены, то выдаются предусмотренные управляющие команды. При отрицательном результате вырабатывается сигнал о наличии неполадки.
— Посредством соответствующих вторичных критериев проверяется последующее правильное по времени выполнение команд на управляющие воздействия.
— В зависимости от результата предыдущего теста совершается переход к следующему шагу программы.
Ценным вспомогательным средством для наглядного представления структуры программы является план реализации (структурная схема) программы, аналогичный применяемому в цифровой вычислительной технике. Важнейшие элементы структурной схемы (диаграммы потока сигналов) уже были приведены на стр. 77.
Программы комплексной автоматизации систем дистанционного управления дизелями. Нижеследующий анализ относится в основном к автоматизации крупных однодизельных установок с непосредственной передачей на вал. При этом в первую очередь рассматривается метод анализа, ориентированный на применение вычислительной техники.
а) Программа запуска. Содержание программы запуска поясняется на примере последовательности выполнения операций (рис. 6.17). Этот же рисунок может служить примером рационального представления взаимосвязанных функциональных процессов.
Процесс запуска начинается с перекладки рукоятки управления либо из нулевого положения, либо через нулевое положение (например из положения «вперед» в положение «назад»), причем двигатель находится в состоянии покоя. Прежде всего производится проверка соответствия положения распределительного вала заданному направлению вращения (тест). При отсутствии такого соответствия должна быть подана команда на переключение распределительного вала (операция). После того как будет подтверждено выполнение этой команды (тест), можно переходить к следующей операции программы.
На этом этапе проверяется готовность к действию различных вспомогательных устройств путем сравнения значений (минимального давления масла в подшипниках, охлаждающей воды, топлива, пускового воздуха и др.) с пусковыми критериями. Если критерии выполнены, то подается сигнал «все вторичные критерии выполнены»; в противном случае дальнейший процесс пуска блокируется и подается сигнал о наличии неполадки.
Затем должна быть подана команда на открытие клапана пускового воздуха, который соединен с включающим звеном счетчика выдержки времени. Работа двигателя начинается тогда, когда частота вращения вала превысит определенное минимальное значение. С помощью условного теста устанавливается, запускается ли двигатель в течение заданного отрезка времени. Не позднее чем по истечении этого отрезка времени, клапан пускового воздуха снова закрывается. С выдержкой времени происходит обратный сдвиг программы и процесс запуска включается снова (петля программы).
По нормальной программе процесс пуска повторяется таким образом несколько раз (обычно до трех раз). Для этой цели петля программы имеет счетчик. Если процесс запуска остается безуспешным, то пусковая операция прекращается и подается сигнал неисправности. Если же двигатель начал работать, то задача этой части программы считается выполненной.
б) Программа разгона двигателя. После поступления сигнала о завершении программы запуска, дальнейшее управление машиной переходит к программе разгона. Автоматика разгона включается и в том случае, если положение рукоятки управления изменяется (задающее воздействие) в пределах диапазона того же направления вращения.
Задача программы заключается в повышении частоты вращения вала до заданного значения, соответствующего положению рукоятки Управления с учетом различных внутренних технологических условий.
Программа разгона имеет непрерывный характер. Взаимосвязи различных частей программы показаны на структурной схеме.
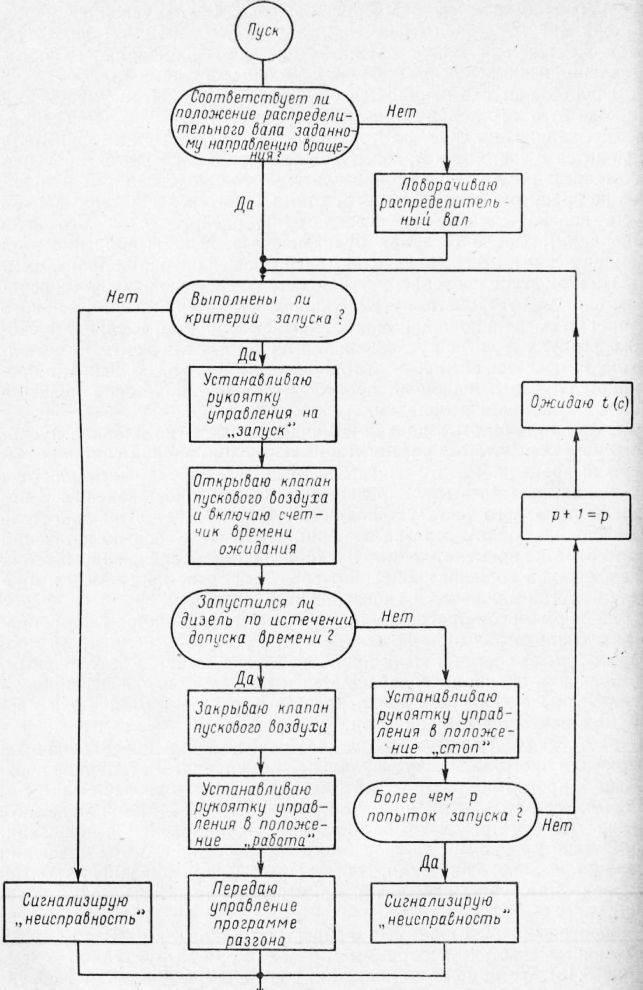
Рис. 1. Структурная схема программы запуска дизеля.
изменения заданного внешнего воздействия на скорость изменения внутреннего воздействия, которое уже согласовывается с внутренними рабочими критериями. Это достигается следующим путем. До тех пор, пока внешнее и внутреннее задающие воздействия, сравниваемые друг с другом с помощью компаратора К, не соответствуют друг другу, остается включенным блок управления по времени ЦУ, который регулирует скорость изменения wBU в зависимости от значения рабочих параметров в направлении постепенного уравнивания внутреннего и внешнего задающих воздействий.
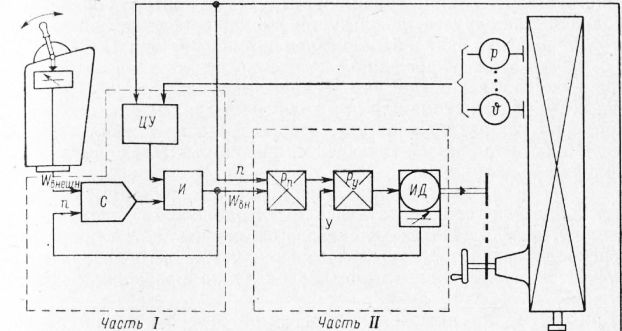
Рис. 2. Блок-схема управления разгоном дизеля с регулированием частоты вращения вала.
В зависимости от устройства блок управления по времени обеспечивает выполнение следующих функций:
— Ограничение ускорения дизеля для предотвращения отрыва потока гребного винта и, следовательно, снижения упора. В этом случае рабочим параметром служит частота вращения вала или скорость его изменения.
— Управление наполнением в соответствии с количеством рабочего воздуха, подаваемого воздуходувкой. В качестве параметра для оценки этого соответствия может служить давление воздуха.
— Ограничение температурного градиента. Параметром может служить температура стенок цилиндров и выхлопных газов.
Средствами автоматики можно производить проверку совпадения фактической частоты вращения вала с критическим его значением. При совпадении этих частот внутреннее задающее воздействие корректируется на некоторую величину: при разгоне в сторону повышения и при снижении оборотов в сторону уменьшения.
Последовательно включенная часть II автоматики разгона работает по принципу стабилизации, задача которой заключается в поддержании соответствия заданного значения частоты вращения х внутреннему задающему воздействию швн с максимальной точностью.
Компенсация влияния внешних возмущающих воздействий (прежде всего волнения моря) может быть достигнута различными техническими решениями при выборе структуры контура управления. В большинстве случаев используется комбинированное управление частотой вращения вала и наполнением цилиндров. При малой и средней скорости судна управление частотой вращения производится одновременно со связанным с ним ограничением наполнения. При длительных переходах судна или при волнении моря заданная величина наполнения устанавливается так, что система управления частотой вращения остается бездействующей и машина работает с постоянным наполнением цилиндров.
в) Программа реверсирования. При перекладке рукоятки управления в положение, соответствующее противоположному направлению вращения, дизель необходимо сначала остановить, затем произвести реверсирование распределительного вала, после чего дизель снова запускается в противоположном направлении вращения и разгоняется.
Критерием для включения программы реверсирования служат перевод рукоятки за нулевое положение и сигнал о начале работы дизеля. Прежде всего перекрывается подвод топлива. Затем производится реверсирование распределительного вала. После этого наступает выдержка времени, продолжающаяся до тех пор, пока частота вращения вала, приводимого в движение попутным потоком гребного винта, не снизится до определенной заданной величины. С этого момента начинает действовать программа запуска, по завершении которой включается программа разгона.
г) Программа аварийного маневрирования. Программа аварийного маневрирования отличается от программы нормального реверсирования включением в нее дополнительного торможения гребного вала двигателем (повышение момента сопротивления). На стр. 148 (п. ё) было показано, что в крупных однодизельных установках это достигается соответствующим воздействием на клапан контр-поДачи воздуха, который регулируется автоматической системой дистанционного управления. Дополнительно к этому автоматика может повысить предельную частоту вращения, так что запуск в противоположном направлении происходит при более высоком значении частоты вращения гребного винта, вращаемого попутным потоком.
Дальнейшее изменение программы заключается в том, что процесс запуска повторяется до тех пор, пока он не будет успешным. Кроме того, программа разгона меняется из-за того, что исключаются ограничения, направленные на снижение износа машинной установки.
д) Программа поиска. С помощью этой программы определяется, какие элементы установки уже находятся в работе. После чего осуществляется переход к той части программы управления, которая соответствует рабочему состоянию установки в данный момент времени. Для контроля перехода с автоматического управления на ручное и наоборот целесообразно иметь информацию о выполнении программы поиска.
ё) Программа проверок. Программа проверок служит для контроля наличия внутренних неполадок и реализуется системой функционального контроля. Она осуществляется либо в рамках программы управления перед выполнением очередной операции, либо проверке периодически подвергаются все части программы, не находящиеся в данный момент в работе. При этом отработанная часть структурной схемы управления обычно заменяется соответствующим моделирующим звеном. Аналогичным путем может производиться функциональная проверка автоматики и на неработающем двигателе.
Программы комплексной автоматизации системы дистанционного управления паровыми турбинами. Структура автоматической системы дистанционного управления паротурбинных энергетических установок аналогична структуре систем управления крупных дизельных установок. Однако для пуска паровых трубин надобность в пусковой аппаратуре отпадает.
Функции автоматического управления можно распределить по следующим частям программы:
а) Программа подготовки к пуску. Эта программа включается в действие пусковой командой, которая подается перекладкой рукоятки управления из нулевого положения. При этом оказывается автоматическое воздействие на соответствующие золотники, заслонки и клапаны для прогрева, продувания воды и воздуха из трубопроводов и агрегатов в предписанной последовательности. Конкретное содержание программы определяется тепловой схемой установки.
б) Программа разгона. Эта программа является основной автоматической системой дистанционного управления и подразделяется в свою очередь на части управления разгоном и регулирования частоты вращения вала.
Для пуска агрегата необходимо переместить рукоятку управления в новое положение, а также выполнить ряд требований, обеспечивающих нормальную работу установки (автоматическое устранение неполадок).
давления пара, чем достигается защита парогенератора от перегрузок.
Контур управления частотой вращения вала выполняется обычно по каскадной схеме. При этом на второй следящий контур возлагается задача точного поддержания заданного положения паровпускных клапанов (или золотников). Такой контур стабилизации положения предусмотрен для клапанных групп турбин переднего и заднего хода, т. е. имеются два контура. Подключение выходного сигнала регулятора частоты вращения к одному из контуров стабилизации положения клапанов осуществляется устройством программы реверсирования. Необходимо отметить, что открытие клапана, а следовательно, и положение исполнительного механизма регулятора пропорциональны вращающему моменту турбины. Поэтому выходной сигнал регулятора частоты вращения может считаться также и задающим воздействием для создания необходимого вращающего момента, т. е. контур стабилизации положения соответствует системе регулирования вращающего момента.
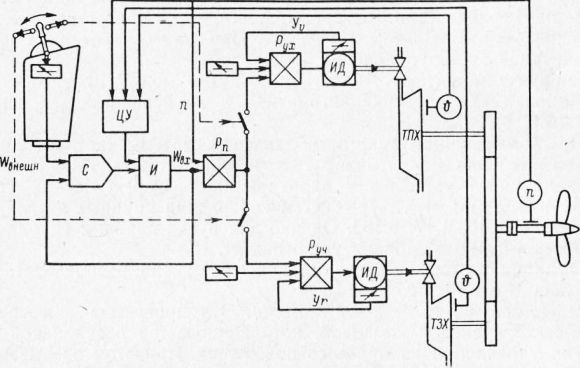
Рис. 3. Блок-схема управления разгоном паровой турбины с регулированием частоты вращения вала.
ЦУ — центральное управление; С — сравнивающее устройство; И — интегратор; Р — регулятор; ИД — исполнительный двигатель; ТПХ — турбина переднего хода; ТЗХ — турбина заднего хода; WBHeuiH — внешнее задающее воздействие; WBX — внутреннее задающее воздействие; п — частота вращения; у — управляющее воздействие; О — температура.
Для динамики всего контура управления частотой вращения определяющее значение имеет в основном инерционность объекта регулирования. Если бы регулятор имел лишь Д-характеристику, то он реагировал бы не только на изменение задающего воздействия, но и на возмущения, связанные с отклонением расхода свежего пара. Периодические изменения частоты вращения гребного винта, вызываемые, например, волнением моря, приводили бы к неустановившемуся состоянию системы регулирования. Ввиду этого к регулятору частоты вращения через ПД-звено подводится только задающее воздействие, причем его желательно выполнить с ПИ-характеристикой.
Ввиду того что непрерывное управление, реагирующее на периодические возмущающие воздействия при качке судна, нежелательно /неспокойное протекание процесса управления, износ исполнительных элементов), регулятор после достижения заданного программой значения частоты вращения, как правило, автоматически отключается. Он снова включается в действие только при последующем пуске агрегата. При выключенном регуляторе частоты вращения выходной сигнал постоянно приводится в соответствие с положением паровпускных клапанов, так что в любой момент времени возможно безударное включение регулятора в действие.
Характеристики объекта управления меняются вследствие таких внешних воздействий, как скорость судна, состояние загрузки и поверхности корпуса судна, ветер, волнение моря и др., поэтому при расчете регулятора частоты вращения возникают такие же трудности, как и при стабилизации курса (см. стр. 108 и 122). Особенно неблагоприятны для устойчивости малые нагрузки объекта управления. Так как для обеспечения устойчивости наладка регулятора должна быть произведена для этого случая, то на сравнительно высоких скоростях судна неизбежно происходит слишком сильное демпфирование процесса регулирования. Приблизительно одинаковое качество стабилизации во всем диапазоне скоростей хода и за его пределами в параметрическом поле всех влияющих факторов может быть обеспечено только при применении принципов адаптации.
в) Программа реверсирования. Важная задача программы реверсирования заключается в управлении подачей сигналов к контурам регулирования положения паровпускных клапанов турбины переднего и заднего хода. При этом моменты их переключения устанавливаются, как правило, таким образом, чтобы было достигнуто перекрывание обеих групп клапанов при их движении в обоих направлениях вблизи точки реверсирования, поэтому в течение определенного отрезка времени в действии находятся оба контура управления положения клапанов. После перехода за нижнее предельное значение частоты вращения гребного винта происходит переход на автоматику разгона в противоположном направлении вращения. Если турбина остановлена несмотря на то, что давление пара превысило определенное предельное значение, то автоматика отключается и на пост подается сигнал о неисправности.
г) Стояночная Программа. Во время стоянок судна особая программа обеспечивает подачу пара в турбины переднего и заднего хода попеременно в течение некоторого времени таким образом, что orfn совершают несколько оборотов. Этим достигается постоянное уравнивание температур.
Аппаратурные решения автоматической системы дистанционного управления. Ниже приводятся возможные варианты аппаратурной реализации автоматической системы дистанционного управления.
К этим системам относятся в первую очередь так называемые системы функционально-групповой автоматики (фирма Siemens) и автоматики управления процессами (фирма ВВС). Основой рассматриваемых автоматических систем служат системы управления комплексными производственными процессами. Децентрализованные системы работают апериодически, и поэтому их следует отнести к асинхронным автоматам.
При таком режиме работы системы возникает проблема, заключающаяся в том, что команды могут поступать одновременно с не-
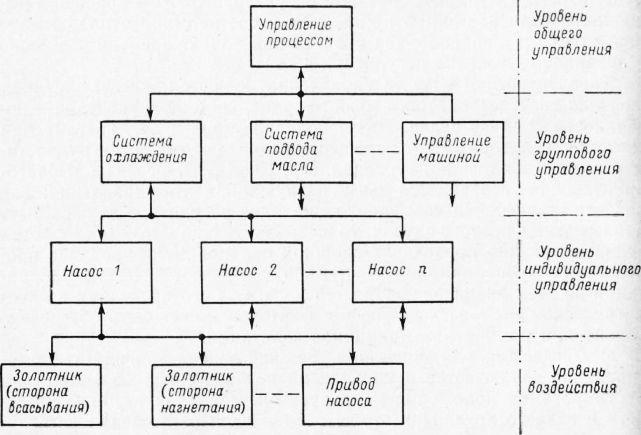
Рис. 4. Иерархическая децентрализованная система управления с четырьмя уровнями.
скольких отдельных частей программы. Поэтому для обеспечения однозначности реализации программы необходимо предусматривать соответствующие блокировки.
Структура рассматриваемых автоматических систем управления характеризуется иерархическим разделением на три—пять уровней. Для разделения функций между различными уровнями иерархии определяющим является условие, при котором технологически разграниченные части системы (подсистемы) должны представлять собой единый узел также и с точки зрения техники автоматизации.
На рис. 6.20 изображена структура автоматической системы дистанционного управления с четырьмя иерархическими уровнями. На верхнем, так называемом уровне общего управления, анализируется заданная судоводителем цель для принятия необходимых решений и выдаются соответствующие команды в следующий уровень.
Групповой уровень подразделен на отдельные технологические подсистемы, как, например, главный двигатель, топливная система, система подвода масла, системы охлаждения и т. д. В пределах этого уровня устанавливается, когда и какие» агрегаты должны находиться в работе.
На уровне локальных автоматических систем управления производится распределение командных сигналов по отдельным агрегатам. Для этого предназначены те части программ, которые управляют автоматическим запуском, разгоном и остановкой агрегатов. На уровень группового управления поступают сообщения о выполнении команд или о неисправностях. Здесь принимается решение, какие дальнейшие меры следует принимать (например, запуск резервного агрегата). Если неисправность не может быть устранена в пределах уровня группового управления (например, падение частоты вращения главного двигателй), то об этом сообщается на уровень общего управления.
Самый нижний уровень предназначен для управления исполнительными органами системы и называется уровнем воздействия. Здесь также реализованы различные блокировки. При достижении заданных положений исполнительных органов, а также при обнаружении неполадок (например, заедание в уплотнении), сообщения об этом передаются на уровень индивидуального управления.
Децентрализованные автоматические системы выполняются преимущественно на дискретных элементах (логические схемы, запоминающие устройства, счетчики и т. д.), но содержат также и различные аналоговые устройства, нелинейности, компараторы и т. п. Обрабатываются главным образом двоичные, а также аналоговые, и в специальных случаях цифровые сигналы.
Реализация таких обширных устройств автоматики предполагает наличие соответствующих разветвленных систем аппаратуры и приборов, выполненных на стандартных элементах. Примером могут служить системы ursamat, Simatic или ВВС — Elektronik. Различные функциональные узлы (сборки) размещаются в стандартизованных емкостях (шкафах).
К одним из преимуществ данного технического решения относится высокая готовность системы, так как при отказе отдельных ее элементов выходит из строя лишь ограниченная часть системы управления установкой. Другое преимущество заключается в наглядности структуры и возможности расширения системы, так что благоприятные с точки зрения стоимости решения могут достигаться также и для небольших и средних установок. Однако типизация таких устройств представляет большие трудности и поэтому затраты на проектирование здесь сравнительно велики. Кроме того, недостатком можно считать также и то, что дополнительное изменение объема функций системы связано со сложными переделками.
Управление посредством цифровых вычислительных машин с программированными запоминающими устройствами. Этот так называемый централизованный вариант обладает всеми признаками цифровой вычислительной машины с программированным запоминающим устройством, как, например, последовательный циклический принцип действия, большая емкость арифметического устройства, гибкость в оформлении программы и др. Особо следует подчеркнуть, что реализацию рабочего алгоритма и его изменение здесь легко можно осуществить с помощью средств программирования, т. е. путем перепрограммирования.
При применении цифровой вычислительной машины для управления процессами экономический фактор стоимости в настоящее время отступает на задний план ввиду постоянного удешевления конструктивных элементов и изготовления машин. К тому же на вычислительную машину можно, кроме собственно управления процессом, возложить выполнение ряда других функций, так что в будущем на крупных судах, безусловно, будет достигнута полная ее загрузка. Однако решающим здесь является надежность, так как при неисправности в центральном устройстве в большинстве случаев выходит из строя вся автоматика. Для ограничения риска наряду с продолжающимся повышением эксплуатационной надежности вычислительных машин предусматриваются также и дополнительные меры (например, системы с двумя вычислительными машинами).