Требования при проектировании. Спуско-подъемные устройства. Водолазный комплекс. Противопожарные средства. Серийные спасательные суда.
Общие требования при проектировании. Прежде всего отметим некоторые общие положения, на которые в последние годы обращается особое внимание при проектировании спасательных судов.
1. Обеспечение возможности выполнения спасательных работ в сложных метеорологических условиях или в неблагоприятной обстановке (например, плавание во льдах). С этой целью предъявляют повышенные требования прочности к конструкции корпуса спасательных судов, предусматривая на них ледовые подкрепления. Появились даже спасатели-ледоколы. Спасательным судам обеспечивают хорошие мореходные качества, обращая внимание на надежность палубных закрытий, защиту внешних постов от волн, создание внутренних проходов по всему судну и т. п.
Спасательные суда должны обладать высокими маневренными качествами как при полной скорости, так и при малой скорости хода. Последнее очень важно при подходе к аварийному судну в сложных метеорологических условиях. Поэтому спасатели оборудуют двухвальными механическими установками, винтами регулируемого шага или крыльчатыми движителями, подруливающими устройствами. Рулевая рубка делается достаточно широкой, чтобы иметь при управлении судном круговой обзор.
Для обеспечения работы личного состава в сложных условиях предусматривают свободную площадку на палубе в наиболее защищенной от волнения части судна (обычно в корме), все грузовые операции механизируются с помощью поворотных кранов или грузовых стрел. Подача электроэнергии на аварийное судно производится по кабелю, топлива и пара — по шлангам.
2. Использование последних достижений науки и техники. В настоящее время при проектировании спасательных судов и средств применяют новейшие достижения в различных областях науки и техники. В этом можно легко убедиться, сопоставляя характеристики спасателей, построенных в разные периоды времени.
В частности, в судостроении появились спасательные суда, с новыми принципами поддержания (на воздушной подушке, подводных крыльях), суда с малой площадью ватерлинии; в области физиологии человека — новый метод выполнения водолазных работ при длительном пребывании человека под давлением; в области космоса—-в завершающую стадию вступили работы по созданию международной космической поисково-спасательной системы «Коспас» — «Сарасат», разработанной специалистами СССР, США, Канады и Франции; в области автоматики, механики, подводной акустики — системы динамического удержания спасательных судов в точке над местом работ, автоматические системы движения подводных аппаратов по направлению и на определенном расстоянии от грунта, манипуляторы на подводных аппаратах, системы поиска объектов, затонувших на океанской глубине, осмотра и подъема их и т. д.
3. Снижение эксплуатационных затрат, что достигается увеличением числа дополнительных работ, которые может выполнять спасательное судно. Работы выбирают таким образом, чтобы время переключения от выполнения дополнительной работы к основной в случаях возникновения аварий было минимальным. Уменьшения эксплуатационных затрат можно добиться и путем создания спасательных средств с весьма ограниченными основными задачами, например, создание буксируемых платформ для доставки автономных подводных аппаратов к месту работ.
Учитывая многообразие спасательных судов, их характеристику целесообразно дать, рассматривая по подклассам предложенной выше классификации.
Универсальные спасательные суда. Судя по опубликованным данным, такие суда за последние десять лет не строились, по причинам, указанным ранее. Однако неправильно было бы исключать возможность их строительства в дальнейшем. В печати, например, появилась статья «Разработка универсального спасательного судна ВМС США» в которой рассматриваются требования к такому судну.
Суда — спасатели подводных лодок
Суда — носители автономных спасательных аппаратов. Наиболее типичным представителем этой группы судов можно считать спасательное судно «Пиджен»2 (США). Оно несет на борту два автономных спасательных аппарата DSRV (Deep Submergence Rescue Vehicle). Необычна для спасательных судов форма этого судна—катамаран. Два корпуса шириной 7,92 м соединены между собой прочным набором главной палубы на расстоянии 10,36 м друг от друга.
Такая форма корпуса имеет свои преимущества и недостатки. Она позволяет несколько уменьшить волновое сопротивление за счет малой ширины корпусов. Форма носовой части корпусов выполнена асимметричной относительно средних по ширине продольных плоскостей с целью уменьшения корабельных волн, образующихся между корпусами. Судно имеет большую поперечную остойчивость, поэтому перемещения тяжелых аппаратов и мостового крана в поперечных направлениях не приводят к существенным накренениям судна. Значительная площадь палуб позволяет выделить площадку для выполнения спасательных работ и посадки вертолета. Суда ка-тамаранного типа имеют хорошую маневренность. Появляется возможность спуска аппаратов в пространство между корпусами, несколько более защищенное от волнения при положениях судна бортом к волне. Кроме того, спуск аппаратов в диаметральной плоскости корабля недалеко от миделя сводит к минимуму вредное влияние бортовой и килевой качки корабля при спуске и подъеме аппаратов.
К недостаткам такой формы следует отнести: стремительность качки судов в связи с большой поперечной остойчивостью, невозможность плавания их за ледоколом при собственной большой ширине, трудности с размещением главных энергетических установок и другого внутреннего оборудования при малой ширине корпусов и, наконец, более сложное решение задач по обеспечению общей прочности судна.
Шестью поперечными переборками корпуса делятся на главные водонепроницаемые отсеки. Имеются две водонепроницаемые палубы и платформа. Непотопляемость обеспечивается при затоплении двух отсеков. На главной палубе расположены две большие надстройки: носовая и кормовая. В них размещены служебные и жилые помещения, мастерская. Крыша кормовой надстройки служит посадочной площадкой для вертолета. Между надстройками находится площадка аварийно-спасательных работ, на которой раскреплены основные спасательные средства: подводные аппараты, водолазные колокола, рабочий катер. Площадка перекрывается мостовым краном грузоподъемностью 75 т. Кран движется между надстройками поперек судна. С помощью поворотных консолей вылет стрелы может быть увеличен на 5 м от борта, что позволяет производить погрузку тяжелых аппаратов с причала, спускать и поднимать рабочие катера и другое оборудование.
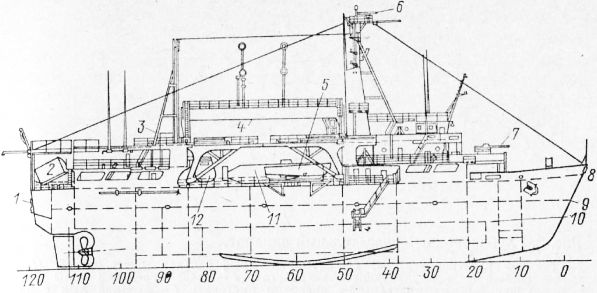
Рис. 1. Спасательное судно подводных лодок «Пиджен».
1 — глубоководный якорь; 2 — рейдовая бочка; 3 — пост управления вертолетом; 4 — палубный мостовой кран; 5 — рабочий катер; 6 — антенна РЛС; 7 — артиллерийское орудие; 8 — главная палуба; 9 — нижняя палуба; 10 — платформа; 11 — спасательный аппарат; 12 — водолазный колокол.
Рассмотрим теперь специальное оборудование спасательного судна «Пиджен».
Автономные спасательные аппараты DSRV.
На конструкции аппарата существенным образом сказалось требование заказчика — ВМС США — обеспечить возможность его переброски из пункта базирования в ближайшую к месту аварии базу подводных лодок на транспортных самолетах. На базе он устанавливается на одну из подводных лодок и доставляется к месту аварии. Такая схема использования аппаратов принята наряду со схемой их применения со спасательных судов. В связи с указанным требованием были существенно ограничены масса аппарата и его габариты. Отсюда необходимость создания сферических корпусов из высокопрочных материалов, выноса основного оборудования за пределы прочного корпуса, применения ртутно-масляной крено-дифферентной системы и ряд других интересных технических решений.
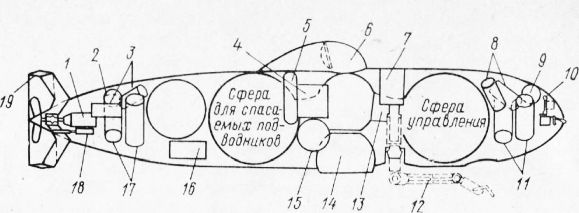
Рис. 2. Глубоководный спасательный аппарат.
1 — гребной электродвигатель; 2 — кормовая дифферентная цистерна; 3, 17 — трубы кормового подруливающего устройства; 4 — насос перекачки воды бортовых уравнительных цистерн; 5 — креновые цистерны; 6 — входной люк с закрытием; 7 — аккумуляторные батареи; 8, 11— трубы носового подруливающего устройства; 9 — носовая дифферентная цистерна; 10 — гидролокатор; 12 — манипулятор; 13 — переходная шахта; 14 — камера присоса; 15 — уравнительная цистерна; 16 — блок гидравлического привода; 18 — механизм привода поворотной насадки; 19 — поворотная насадка.
Прочный корпус аппарата состоит из трех сфер, соединенных между собой цилиндрическими переходными шахтами. Средняя сфера имеет верхний выходной люк, снизу к ней присоединена камера присоса. В носовой сфере размещаются операторы. Здесь сосредоточены все приборы и пульты управления, поэтому ее называют сферой управления. Спасаемые размещаются во второй и третьей сферах. Аккумуляторная батарея, главный электродвигатель, приводы подруливающих устройств и системы гидравлики, уравнительная и дифферентная цистерны вынесены в легкий корпус. Главный двигатель аппарата мощностью 11 кВт (15 л. е.), двигатели подруливающих устройств мощностью 5,5 кВт (7,5 л. с.) и двигатели гидравлических насосов той же мощности получают питание от серебряно-цинковой аккумуляторной батареи через статический преобразователь.
Для изменения направления и частоты вращения винтов, а также мощности двигателей, вращающих винты, применено цифровое управление, осуществляемое оператором с главного пульта. Маршевый движитель — винт диаметром 1,8 м в поворотной насадке — обеспечивает поступательные перемещения аппарата; носовые и кормовые подруливающие устройства — вертикальные и горизонтальные перемещения. Такая система движителей, при наличии описанного уже централизованного управления, обеспечивает аппарату хорошие маневренные качества, позволяющие операторам на малой скорости сближаться с затонувшей подводной лодкой, подходить к месту работ и зависать над ним даже при наличии подводных течений.
Для выполнения аппаратом своих функций необходимо решение еще одной технической задачи: обеспечение возможности наблюдения за обстановкой. При этом используется группа средств:
— система наведения судна-базы, которая дает операторам аппарата первоначальное направление на затонувшую подводную лодку;
— гидроакустические станции самого аппарата, с помощью которых определяется расстояние до грунта, наличие препятствий по курсу и расстояние до них, направление и расстояние до затонувшей подводной лодки;
— телевизионная установка аппарата и иллюминаторы;
— высокочастотный гидролокатор, обеспечивающий распознавание комингс-площадки лодки в условиях малой прозрачности воды.
С помощью манипулятора производится присоединение тросика лебедки подтягивания к рыму крышки спасательного люка и очистка комингс-площадки лодки. При посадке аппарата, которая производится с помощью лебедки подтягивания, расположенной в камере присоса аппарата, происходит центровка камеры присоса и комингс-площадки. Путем удаления воды из камеры осуществляется присос аппарата к комингс-площадке лодки, открываются крышки люков и группа спасаемых переходит в аппарат, после чего крышки люков закрываются и аппарат начинает всплытие. Указанный цикл может повторяться несколько раз в зависимости от численности экипажа затонувшей подводной лодки.
Главное спуско-подъемное устройство. Спуск и подъем тяжелых автономных аппаратов с надводного судна — сложная техническая задача, которая решается с помощью мостового крана и специальной платформы с подъемником. Платформу с аппаратом опускают и поднимают через центральную шахту длиной 16,76 и шириной 4,67 м. Шахта имеет люковое закрытие складывающегося типа. Аппарат при спуске подается к крану на тележке по рельсовым путям, устанавливается на платформу, которая опускается вначале на подъемнике, а затем на стальных тросах на глубину до 30—40 м. Здесь аппарат отделяется от платформы и начинает самостоятельное движение. При возвращении его на судно операцию повторяют в обратном порядке. Для уменьшения влияния волнения тросы пропускают через гидропневматические виброизоляторы.
Несмотря на столь сложную и, казалось бы, всесторонне продуманную конструкцию, данное устройство позволяет опускать и поднимать аппараты при волнении моря до трех баллов. Об этом сообщалось, в частности, в докладе Н. Эстабрука и Г. Хорна «Остойчивые погружные платформы для спуска и подъема подводных аппаратов» на 4-й ежегодной конференции по технике плавучих сооружений в г. Хьюстоне, 1972 г.1 Видимо, это обстоятельство и послужило одной из причин того, что намечавшаяся серия строительства судов этого типа была ограничена всего лишь двумя судами. При отсутствии волнения применяют более простую схему подъема: аппарат всплывает на поверхность, затем его вводят между корпусами на оттяжках, устанавливают над опущенной платформой и поднимают платформу вместе с аппаратом.
Водолазный комплекс DDS-Mk.II (Deep Diving System), установленный на судне, обеспечивает работу водолазов на больших глубинах по новому методу длительного пребывания под давлением. Комплекс включает в себя две двухотсечные четырехместные декомпрессионные камеры длиной 8,23 м, диаметром 2,44 м и две транспортные камеры РТС (Personnel Transfer Capsull) для доставки водолазов к месту работ и обратно в декомпрессионные камеры в условиях повышенного давления. Масса каждой камеры 15 т, рабочая глубина погружения 300 м. Спуск и подъем на трос-кабеле, по которому подается электропитание и осуществляется связь с водолазами. Система жизнеобеспечения позволяет выполнять длительные работы, например, в течение месяца. Таким образом, данное судно, обладающее еще и системой удержания над местом работ, считается достаточно надежной базой ВМС США для выполнения глубоководных водолазных работ.
Кроме уже рассмотренного специального оборудования на судне предусмотрены: средства поиска затонувших подводных лодок и подводной связи с личным составом, а также с операторами спасательных аппаратов, гидроакустическая система наблюдения за подводными аппаратами и их наведения на затонувшую подводную лодку, телевизионная установка для наблюдения за подводными работами. Управление всеми операциями производится из единого центра SOCC (Salvage Operational Control Center). В нем установлена цифровая электронно-вычислительная машина, помогающая выбрать рациональные средства и методы выполнения отдельных мероприятий по поиску затонувшей подводной лодки, спасению ее экипажа и подъему лодки.
недостаткам данного судна следует отнести малую скорость полного хода и большие эксплуатационные затраты. Последнее обстоятельство заставляет многие страны строить спасательные суда с неавтономными средствами спасания, хотя их возможности еще более ограничены.
Несмотря на указанные недостатки, приведено достаточно подробное описание судна, опыт создания которого может быть учтен при разработке судов — носителей подводных аппаратов.
Суда — носители неавтономных спасательных средств. Существенных изменений в данной группе судов зарубежной постройки за последние годы не произошло, поэтому их краткую характеристику можно дать, принимая за основу японское спасательное судно «Фусими», построенное в 1970 г. Неавтономное спасательное оборудование имеет меньшую массу и габариты, что упрощает спуско-подъемные устройства и размещение спасательных средств. Суда этого типа имеют в целом меньшие водоизмещение, численность экипажа и, соответственно, эксплуатационные затраты.
В качестве основного средства для спасения подводников на них используют колокол, который представляет собой вертикальный цилиндр со сферической крышей и сужением в виде усеченного конуса в нижней части, заканчивающейся опорным кольцом с резиновой прокладкой. На колоколе всего лишь один обитаемый отсек — рабочая камера. В ней находятся операторы (обычно два) при спуске колокола и размещаются спасаемые (8—10 чел.). В рабочей камере установлены клапаны и приборы управления всеми системами колокола и его единственным механизмом — лебедкой подтягивания, которую называют механизмом погружения и всплытия. Платформой рабочая камера отделена от нижней части колокола, где расположены камеры присоса и балластная цистерна. В камере присоса помещен барабан лебедки подтягивания. Вентиляция рабочей камеры колокола, подача на него необходимой энергии и связь операторов с судном осуществляются с помощью шлангов и кабеля.
Технология работ с использованием колокола следующая. С помощью крана, грузовой стрелы или специальной балки колокол спускается на воду. В балластную цистерну принимается вода, замещающая массу отсутствующих пока подводников. Водолазы присоединяют ходовой конец троса лебедки к рыму на крышке люка лодки. Включается лебедка и начинается погружение колокола. При приближении к лодке скорость подтягивания уменьшается до минимальной. Наконец колокол опорным кольцом ложится на соответствующее кольцо комингс-пло-Щадки. В этом положении операторы сообщают камеру присоса с балластной цистерной. Происходит присос колокола. Вода из камеры присоса полностью удаляется (обычно в лодку), давление выравнивается с лодочным. Открываются крышки люков и партия подводников переходит в рабочую камеру. Далее начинают всплытие, процесс которого происходит в обратном порядке.
Циклы погружения и всплытия повторяются несколько раз, пока все подводники не окажутся поднятыми на спасатель. Если в отсеках лодки повышенное давление, колокол каждый раз поднимается на борт спасательного судна и присоединяется к переходной шахте, по которой подводники спускаются в де-компрессионную камеру. Естественно, что проведение спасательных работ при такой схеме спасания зависит от метеорологических условий в большей степени, чем при схеме, принятой для судов — носителей автономных спасательных аппаратов. Прежде всего, судно-спасатель должно надежно удерживаться над местом работ и иметь возможность изменять свое положение так, чтобы место спуска колокола оказывалось практически над комингс-площадкой затонувшей подводной лодки.
В условиях волнения наиболее ответственными моментами при выполнении работ будут следующие: спуск колокола на воду и подъем его; выход колокола «на панер» в процессе погружения, когда ходовой трос натянут, но верхняя часть еще не скрылась под водой; заключительный момент всплытия, когда верхняя часть колокола окажется над водой. При спуске и подъеме колокола опасно его раскачивание на подвесе (масса колокола около 10 т); на втором и третьем этапах колокол раскачивается на поверхности как поплавок, а конец ходового троса, удерживающего его, закреплен на неподвижной подводной лодке. Рывки, возникающие в ходовом тросе, могут привести к его обрыву или повреждению деталей механизма подтягивания. Указанные моменты ограничивают возможность проведения спасательных работ судами данного типа.
Суда—носители неавтономных спасательных средств должны иметь следующее оборудование: средства поиска затонувшей подводной лодки и связи с ее личным составом; водолазный комплекс, включающий в себя водолазный колокол, декомпрес-сионные камеры, рассчитанные на обеспечение декомпрессии водолазов и спасаемых, системы жизнеобеспечения; компрессоры для продувания отсеков или цистерн главного балласта затонувшей лодки и понтонов; рейдовое оборудование, позволяющее спасателю удерживаться над местом работ. Рассмотренные суда обладают высокой скоростью хода, хорошими маневренными и мореходными качествами.
Спасательные подводные лодки. В связи с тем, что работа судов—носителей спасательных подводных аппаратов имеет ограничения по балльности моря, особый интерес представляет новое направление в развитии спасателей — спасательные подводные лодки. Их характеристику можно дать на примере лодки, разработанной шведской фирмой в Кокуме с участием французской фирмы «Комекс». Это небольшая, по современным представлениям, дизель-электрическая подводная лодка с четырьмя отсеками в прочном корпусе.
Первый отсек предоставлен водолазам. В нем — две двух-отсечные, поставленные одна над другой, декомпрессионные камеры. Здесь же сосредоточены основные системы жизнеобеспечения водолазов, водолазное имущество и мастерская. Во втором отсеке находится центральный пост. В третьем — аккумуляторная батарея, каюты личного состава, камбуз, кают-компания, салон, санузел. Четвертый отсек — механический. Здесь размещены гребные электромоторы, дизель-генераторы и другие вспомогательные механизмы.
Кроме обычных систем и устройств на лодке-спасателе установлены дополнительные гидроакустические станции связи с подводным аппаратом и аварийной подводной лодкой, системы автоматического удержания лодки по курсу и глубине при ее движении, два вертикальных и два горизонтальных подруливающих устройства.
В носовой части лодки легкий корпус поднят высоко и образует ангар подводного аппарата. В середине расположена надстройка и ограждение шахт РДП (работа дизеля под водой). Они обеспечивают возможность выхода спасательного аппарата и возвращения его на лодку в режиме РДП при благоприятных метеорологических условиях. При неблагоприятных условиях эти операции проводятся на некоторой глубине.
Размещение спасательного аппарата в ангаре вызвано тем, что дизель-электрическая подводная лодка основную часть плавания совершает в надводном положении и поэтому приходится защищать аппарат от действия волн. Подъем аппарата до уровня верхней палубы и спуск его в ангар осуществляются с помощью специальной подъемной платформы с захватами, фиксирующими положение аппарата на платформе. Система управления обеспечивает контроль за его посадкой. На подводной лодке предусмотрена установка спасательного аппарата типа URV (Underwater Rescul Vehicle).
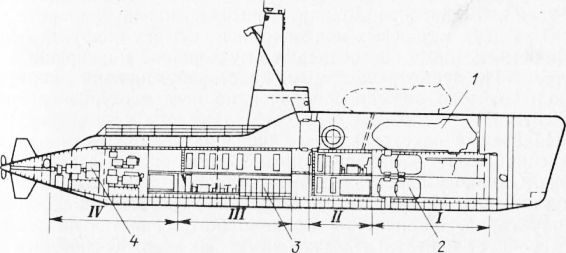
Рис. 3. Спасательная подводная лодка—носитель подводного аппарата.
I — водолазный отсек; II — центральный отсек; III — аккумуляторный и жилой отсек; IV — энергетический отсек; 1 — спасательный подводный аппарат; 2 — декомпрессионные камеры; 3 — аккумуляторная батарея; главные электродвигатели.
В отличие от уже рассмотренного аппарата DSRV, аппарат URV имеет четыре отсека: управления, спасательный, вспомогательных механизмов и водолазный. Водолазный отсек снабжен системами, обеспечивающими нахождение в нем двух водолазов под повышенным давлением. Управление составом газовых смесей производится из соседнего отсека, на кормовой переборке которого размещены распределительные устройства и приборы контроля за составом смесей. Таким образом, аппарат является комбинированным — спасательно-водолазным. Водолазы смогут выполнить те работы, которые окажутся невоз1 можными для манипуляторного устройства.
В отсеке управления находятся навигационные приборы. Наблюдение за обстановкой, поиск объектов осуществляется с помощью гидролокаторов, телевизионной установки и визуально через иллюминаторы. Движительный комплекс аппарата состоит из двух маршевых движителей и четырех подруливающих устройств, которые обеспечивают ему хорошие маневренные качества. Предусмотрена возможность буксировки аппарата в подводном положении с подачей на него электроэнергии по кабелю.
Подводный спасатель имеет большие возможности для выполнения работ в неблагоприятной метеорологической обстановке. Однако у спасательной подводной лодки есть и свои недостатки. Это прежде всего большая стоимость и сложность эксплуатации. Наличие на лодке одного спасательного аппарата следует считать недостаточным как для обеспечения высокой надежности выполнения ответственных спасательных работ в целом, так и надежности эксплуатации самого аппарата. Не исключено, что и он окажется в аварийной ситуации. Поэтому в настоящее время к носителям предъявляют требование быстрого подъема аварийного аппарата. Подводные лодки такой возможностью не обладают.
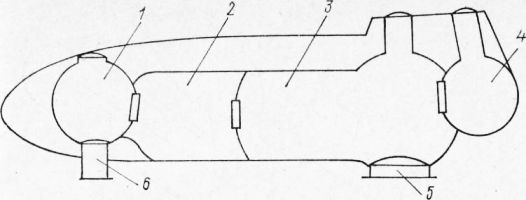
Рис. 4. Спасательный аппарат URV.
1 — водолазный отсек; 2 — отсек вспомогательных механизмов; 3 — спасательный отсек; 4 — отсек управления; 5 — присоединительная камера, или камера присоса; 6 — шлюзовой люк.
Указанные недостатки надводных и подводных носителей аппаратов заставляют рассматривать другие возможные направления обслуживания подводных аппаратов и, в частности, использование в качестве носителей специальных платформ.
Платформы — носители подводных аппаратов. Заслуживает внимания опыт использования небольших буксируемых платформ, приобретенный в США. Платформы LRT (Launch Recovery and Transport) и LARP (Launch and Recovery Platform) эксплуатировались в районе Гавайских островов, где с их помощью производился спуск и подъем аппаратов массой 4—5 т в условиях волнения. Платформа представляет собой катамаран с двумя цилиндрическими горизонтальными поплавками (рис.6), соединенными между собой набором. Решетчатый настил, покрывающий набор, образует рабочую площадку, на которую и устанавливают подводный аппарат. Растяжками его закрепляют к платформе перед буксировкой. Над горизонтальными поплавками установлены спонсоны, обеспечивающие платформе остойчивость при погружении и всплытии. Внутри поплавков поперечными переборками выделены цистерны главного балласта и уравнительные.
Платформу с аппаратом буксируют на место работ и заполнением цистерн главного балласта погружают под воду. Глубиной погружения управляет водолаз с пульта. На второй платформе глубину погружения ограничивали с помощью резинового буя, прикрепляемого к платформе эластичным шнуром. Длина шнура в этом случае определяла глубину погружения платформы. Обычно она была около 20 м. Второй способ, безусловно, является более надежным. Эксплуатация платформ показала, что с их помощью можно производить спуск и подъем небольших аппаратов при волнении моря до 5 баллов. Буксировка платформ осуществлялась со скоростью до 10 уз.
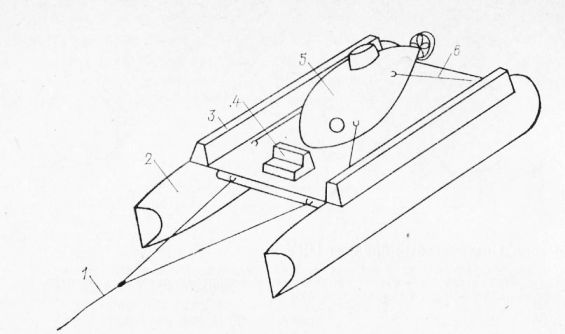
Рис. 5. Буксируемая стабилизированная платформа.
1 — буксирный трос; 2 — горизонтальные поплавки; 3 — спонсоны; 4 — место для водолаза-оператора и пульт управления; 5 — подводный аппарат; 6 — растяжки.
Однако такие платформы не позволяют перебрасывать большие аппараты на значительные расстояния, поскольку во время буксировки при усилении волнения аппараты могут быть сорваны, так как они ничем не защищены. Кроме того, такого типа платформы не обеспечивают работу спасательных и водолазных аппаратов, ибо не имеют декомпрессионных камер. Более совершенными являются платформы другого типа, имеющие, кроме горизонтальных поплавков, стойки и балласт, обеспечивающий им остойчивость как в полупогруженном, так и в погруженном положениях.1
Для доставки к месту работ подводных аппаратов, не имеющих шлюзовой камеры присоса, можно использовать полупогружную грузовую платформу, изображенную на рис. 7. Платформа с аппаратом буксируется в полупогруженном положении. При этом аппарат находится под водой и надежно закреплен между горизонтальными поплавками с помощью удерживающих манипуляторов и растяжек (последние на рисунке не показаны). Устойчивость платформы при буксировке проверялась на модельных испытаниях.
Работу водолазных и спасательных подводных аппаратов обеспечивает платформа, изображенная на рис. 7. На ней в горизонтальных поплавках установлены: декомпрессионная камера, системы жизнеобеспечения, жилые отсеки. Диаметр стоек выбран из расчета возможности перехода личного состава из поплавков в верхнюю камеру. Установлены комингс-площадки
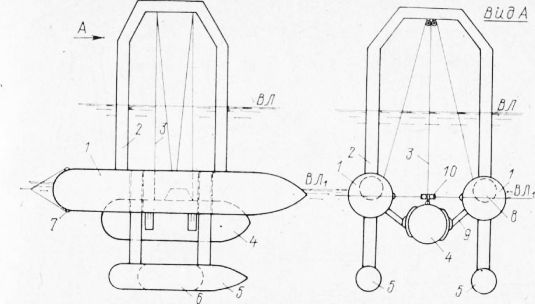
Рис. 6. Полупогружная грузовая платформа.
1 — горизонтальные корпуса; 2 — вертикальные стойки; 3 — грузовой трос; 4 — транспортируемый аппарат; 5 — подвижный балласт; 6 —уравнительная цистерна балласта; 7 — буксирные рымы; 8 — грузовые лебедки; 9 — удерживающие манипуляторы; 10 — блоковая оснастка.
для посадки на поплавки водолазных или спасательных аппаратов.
Такая платформа имеет три фиксированных положения относительно уровня воды:
— надводное — ватерлиния равновесия пересекает горизонтальные поплавки, при этом остойчивость платформы обеспечивается за счет больших моментов остойчивости формы (поплавки разнесены); подвижный балласт поднимается в верхнее положение (под поплавками) путем продувки уравнительных цистерн внутри балластных камер; осадка платформы минимальная, что позволяет вводить ее в бухты, подводить к причалам;
— полупогруженное — основное положение — ватерлиния проходит близко от середины высоты стоек. Для этого подвижный балласт опускается в нижнее положение, а цистерны главного балласта заполняются водой. В таком положении платформа буксируется к месту работ, устанавливается на рейдовое оборудование и при благоприятных метеорологических условиях выпускает и принимает подводные аппараты;
— погруженное — платформа переходит кратковременно при ухудшении метеорологических условий. Переход и удержание на заданной глубине производятся с помощью подводных якорей.
Если снабдить такую платформу запасами пищи, воды, топлива, то она будет обладать большой автономностью, поскольку в полупогруженном положении сохраняется связь с атмосферой. Модельные испытания показали, что качка таких платформ незначительна даже при сильном волнении. Небольшие движители могут обеспечить некоторое маневрирование над участком работ.
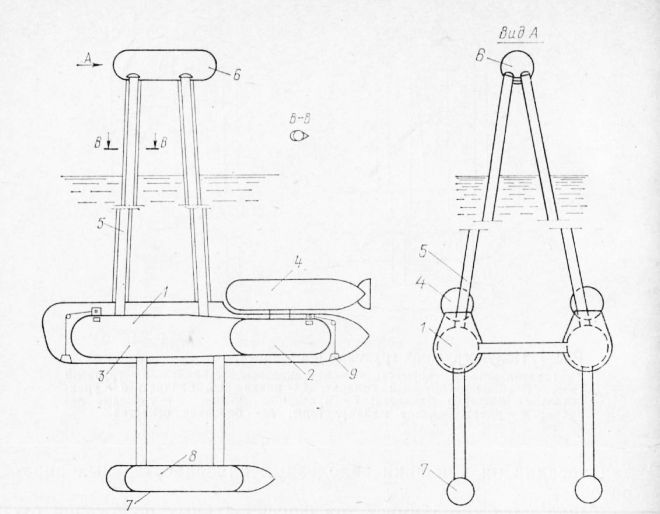
Рис. 7. Водолазная стабилизированная платформа.
1 — горизонтальные поплавки; 2 — декомпрессионная камера; 3 — жилой отсек; 4 — самоходный подводный аппарат; 5 — стойки; 6 — верхняя камера; 7 — подвижный балласт; 8 — уравнительная цистерна балласта; 9 — подводные якоря.
Экономичность эксплуатации платформы очевидна. В тоже время, при наличии систем наблюдения и связи, она сможет обеспечить достаточно надежное выполнение ряда основных функций спасателя подводных лодок или водолазного судна.
Спасательные буксиры
Океанские спасательные буксиры. Спасательный буксир «Ягуар» (СССР) по конструктивному типу представляет собой судно с удлиненным баком, носовым бульбом, крейсерской кормой, с двумя винтами регулируемого шага. Имеет неограниченную мореходность, большую дальность плавания и высокую скорость полного хода. Непотопляемость обеспечивается при затоплении машинного или котельного отделения либо двух любых других смежных отсеков. На судне установлено носовое подруливающее устройство. Автономность буксира —60 суток. Для экипажа созданы хорошие условия: одно- и двухместные каюты, необходимые бытовые помещения. Предусмотрены каюты для аварийной партии из 18 чел и места для спасаемых (46 мест).
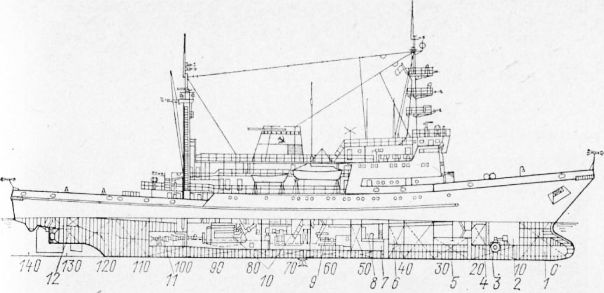
Рис. 8. Океанский спасательный буксир «Ягуар» (СССР).
1 — форпик; 2 —помещение подруливающего устройства; 3, 4 — цистерны пресной воды; 5 — балластная цистерна; 6 — цистерна дизельного топлива; 7 — помещение лага и эхолота; 8 — гиропост; 9 — помещение вспомогательных механизмов; 10 — машинное и котельное отделения; 11 — помещение механизма управления шагом винта; 12 — ахтерпик.
Спасательное оборудование включает в себя буксирное устройство, противопожарные системы, бортовые спасательные катера, водолазные станции.
Буксирное устройство. На судне установлена двухбарабан-ная электрогидравлическая лебедка с тяговым усилием 589 Н (60 тс) на главном и 294 Н (30 тс) на вспомогательном барабане, буксирные тросы: один длиной 1000 м, диаметром 66,5 мм и другой длиной 700 м, диаметром 49 мм. Лебедка защищена от волнения. С ее помощью можно буксировать аварийные суда любого водоизмещения, включая супертанкеры. Буксирной лебедкой управляют из кормового поста управления или из рулевой рубки.
Для снятия аварийных судов с мели рывками на буксире установлен поперечный битенг.
Бортовые спасательные катера. Спасение людей с аварийных судов и плавающих на воде осуществляется с помощью небольших бортовых катеров. Катер закрытого типа с управлением из небольшой кормовой рубки. По бортам имеет воздушные отсеки, для обеспечения непотопляемости заполненные пенополиуретаном.
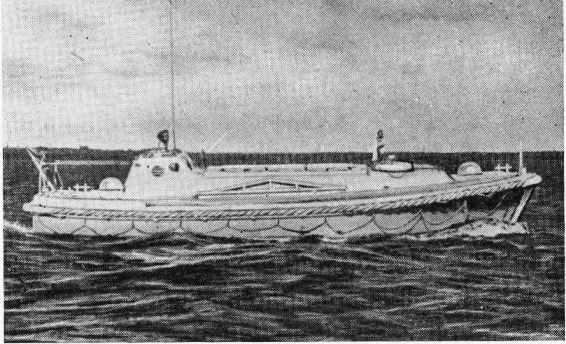
Рис. 9. Бортовый спасательный катер.
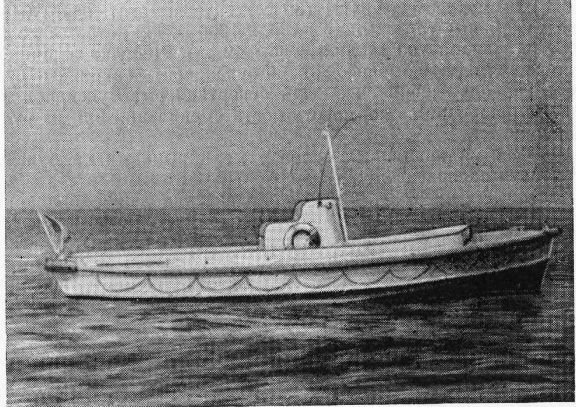
Рис. 10. Бортовый рабоче-спасательный катер.
Бортовый рабоче-спасательный катер открытого типа, наряду со спасанием людей, выполняет некоторые работы, например заводку швартовов спасателя на рейдовые бочки, подачу концов, буксировку небольших плавучих средств. Корпус катера изготовлен из стеклопластика и имеет ряд водонепроницаемых отсеков. Для спуска воды, попавшей в катер, служат специальные шпигаты с захлопками, пропускающими воду в одном направлении (из катера). Двухвальная движи-тельная установка обеспечивает хорошие маневренные качества.
Противопожарные средства. На буксире предусмотрены два центробежных пожарных насоса ДПЖН-14. Схема включения допускает их параллельную и последовательную работу. В первом случае общая подача составляет 1000 м3/ч при напоре 9,81-Ю5 Па (100 м вод. ст.), во втором — 500 м3/ч при напоре 19,6 – 105 Па (200 м вод. ст.). Четыре высокоподнятых лафетных ствола, через которые может подаваться пена. Система водяных завес предохраняет судно от теплового излучения при подходе к горящему объекту. Для откачки воды из отсеков аварийного судна спасатель имеет переносные мотопомпы, погружные электронасосы, водоструйные эжекторы. Предусмотрены запасы аварийного имущества и материалов. Грузовые операции выполняются с помощью грузовых стрел: кормовой на 15 т и двух носовых по 3 т каждая.
Морские спасательные буксиры — основное ядро спасательного флота. Буксир-спасатель типа «Пурга» СССР представляет собой судно с удлиненным баком, развитой средней надстройкой, двухвальное с дизель-электрической установкой. По мореходности оно не имеет ограничений плавания. Непотопляемость обеспечена при затоплении одного любого отсека. С помощью двух винтов в поворотных насадках Достигаются хорошие маневренные качества. Носовое подруливающее устройство в виде винта регулируемого шага в трубе улучшает маневрирование на малых ходах. На судне созданы хорошие условия для экипажа: каютная система размещения, система кондиционирования воздуха и др.
Противопожарные средства: пожарный электронасос подачей 1000 м3/ч при напоре 9,8Ы05 Па (100 м вод. ст.). Питание на электродвигатель пожарного насоса подается от одного из главных генераторов. Три лафетных ствола, из которых два расположены на верхнем мостике и один — на площадке мачты. Стволы снабжены съемными насадками, позволяющими подавать по ним воздушную пену с кратностью около 10. Предусмотрена возможность дистанционного управления лафетными стволами из рулевой рубки. На судне имеются переносные средства пожаротушения, в том числе два переносных пеногенератора с кратностью пены около 100. Система водяных завес защищает буксир от теплового излучения при подходе к горящему объекту.

Рис. 11. Морской спасательный буксир «Напористый» (типа «Пурга»)
Буксирное устройство: электрогидравлическая буксирная лебедка полуавтоматического типа. Установленная на верхней палубе в специальном помещении, лебедка при сильных рывках потравливает буксирный трос, выбирание которого производится при ручном управлении. Буксирный трос диаметром 50,5 мм, длиной 720 м. Для снятия судов с мели рывками на судне предусмотрен двойной битенг с тумбами диаметром 600 мм, рассчитанный на усилие в 980 Н (100 тс). Кроме того, имеется буксирный гак, рассчитанный на усилие в 196Н (20тс).
Водолазное снаряжение: два комплекта вентилируемого снаряжения и два комплекта универсального легководолазного снаряжения. Декомпрессионная камера. Установка подводной сварки, подводная телевизионная установка.
Грузовая механизированная стрела грузоподъемностью 5 т с вылетом за борт 3,5 м.
Противопожарные суда
Морское противопожарное судно «Генерал Гамидов» (СССР)—гладкопалубное судно с двухвальной гребной установкой. Назначением его является: тушение пожаров на судах в море, в портах и на рейдах, а также на береговых сооружениях и нефтепромыслах. Обладает хорошими маневренными качествами и неограниченной мореходностью. Для улучшения маневренности на малых ходах на судне установлено носовое подруливающее устройство, состоящее из двух разновращающихся винтов в трубе.
Противопожарные средства: четыре главных пожарных насоса общей подачей 4000 м3/ч, семь лафетных стволов, способных подавать на очаг пожара 500 м3 воды в час на расстояние около 100 м, и гидропушка с подачей 1000 м3/час на расстояние около 120 м. Четыре лафетных ствола, расположенных высоко на площадках мачт, и гидропушка имеют дистанционное управление из ходовой рубки и закрытого мостика. Система пенотушения позволяет накрыть очаг пожара пеной. Для этого может быть подано 3400 м3 пены в течение 15 мин. Пена подается через верхние лафетные стволы, снабженные сменными насадками. Дальность пенной струи около 80 м. Система объемного тушения позволяет в течение нескольких минут потушить пожар в задраенных помещениях или отсеке объемом 1000 м3. На судне большое количество переносных средств пожаротушения (возимые лафетные стволы, пеногенераторы, ручные стволы). Система водяных завес предохраняет судно от теплового излучения при подходе к горящему объекту.
Водоотливные средства: погружные электронасосы и водоструйные эжекторы. Их передача на аварийное судно осуществляется с помощью высокого поворотного крана или огнезащитной шлюпки.
На судне созданы хорошие условия для экипажа: каютная система размещения, система кондиционирования воздуха и др.
Базовые противопожарные суда имеют небольшую дальность плавания и водоизмещение, но по составу противопожарных средств и их производительности часто не уступают морским противопожарным судам. На этих судах предусматривают использование мощности главных двигателей для обеспечения действия пожарных насосов. В последние годы противопожарные суда стали снабжать вышками для переброски аварийных партий и переносных противопожарных средств на высокобортные аварийные суда. Вышки имеют складывающуюся или выдвижную конструкцию, высота их обычно более 20 м, на них иногда устанавливают лафетные стволы.
Водолазные суда и боты. Созданы суда с палубными водолазными комплексами, использующие новый метод выполнения водолазных работ в морских условиях. Те же работы на небольших глубинах (до 60 м) производятся с помощью водолазных ботов.
Водолазное судно «Уич Куин» (Англия) с удлиненным полубаком и двухвальной дизельной установкой (рис. 13). У него небольшая скорость полного хода, но хорошие маневренные качества, обеспеченные расположением рулей за винтами, двумя носовыми и двумя кормовыми подруливающими устройствами. Средняя часть судна отдана водолазам. В связи с этим машинное отделение с главными двигателями смещено в корму. В водолазном отсеке параллельно диаметральной плоскости расположены три декомпрессионные камеры: одна с левого борта и две с правого. Между собой они соединены переходной камерой. В этом же отсеке находятся баллоны с газами, необходимыми для приготовления дыхательных смесей, и пульты управления давлением в камерах и составом смесей. К переходной камере стыкуется сверху через шахту водолазный колокол, спуск и подъем которого производится через специальную шахту диаметром 3 м, расположенную в соседнем отсеке. Подача колокола к шахте и обратно, после возвращения из глубины, механизирована.
На судне имеется небольшой бортовый катер с декомпрес-сионной камерой. Он используется в тех случаях, когда водолаз по каким-то причинам всплыл на поверхность без декомпрессии. Декомпрессионная камера катера стыкуется через шахту с одной из декомпрессионных камер правого борта. На судне установлен поворотный кран грузоподъемностью 50 т и вспомогательный кран грузоподъемностью 8 т. Наличие крана большой грузоподъемности позволяет с помощью данного судна производить монтажные и ремонтные работы подводного оборудования. Для удержания над местом работ на судне имеются два носовых и кормовой якоря с держащей силой 24,6 Н (2,5 тс) каждый, длина цепи к каждому якорю 1000 м. Автономность водолазного судна 30 суток.
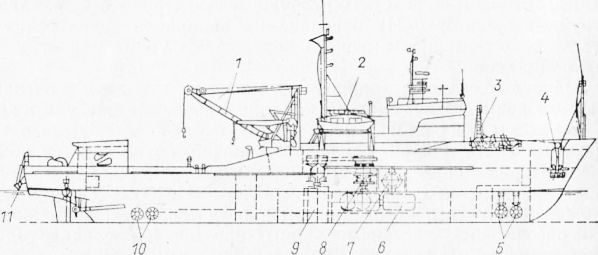
Рис. 12. Водолазное судно «Унч Куин».
1 — подъемный кран; 2 — спасательный катер; 3 — вспомогательный кран; 4 — носовой якорь; 5 — носовое подруливающее устройство; 6 — декомпрессионная камера; 7 — катер с малой декомпрессионной камерой; 8 — водолазный колокол; 0 — шахта для спуска водолазного колокола; 10 — кормовое подруливающее устройство; 11 — кормовой якорь.
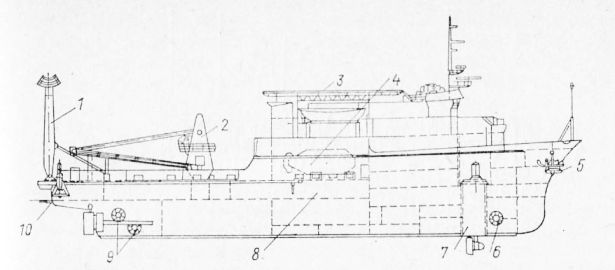
Рис. 13. Водолазное судно «Сван Оушен».
1 — портальный кран; 2 — поворотный кран; 3 — вертолетная площадка; 4 — транспортный подводный аппарат; 5 — носовой якорь; 6 — носовое подруливающее устройство; 7 — выдвижная винто-рулевая колонка; 8 — водолазный отсек; 9 — кормовое подруливающее устройство; 10 — кормовой якорь.
Водолазное судно «Сван Оушен» (Англия) отличается некоторыми особенностями. Транспортный аппарат обеспечивает доставку водолазов к месту работ. Спуск аппарата производится с кормы судна с помощью склоняющегося портала грузоподъемностью 980 Н (100 тс), к которому он подается на тележке по рельсовым путям. На судне предусмотрена вертолетная площадка. Для улучшения маневренных качеств на малых ходах применена, кроме трех подруливающих устройств, выдвижная винторулевая колонка.
Морской водолазный бот «Краб» (СССР) — гладкопалубное судно с развитой надстройкой в средней части. Двухвальная установка обеспечивает ему надлежащие маневренные качества. На боте созданы хорошие условия для экипажа (каютное размещение, система кондиционирования воздуха). Жилые отсеки расположены внутри прочного корпуса и в надстройке.
Специальное оборудование бота включает в себя двухотсеч-ную декомпрессионную камеру диаметром 1,6 м и длиной 3,9 м, водолазный колокол и водолазное вентилируемое снаряжение. Спуск и подъем колокола производится с помощью специальной П-образной балки. Водолазный колокол снабжен иллюминаторами и может использоваться как наблюдательная камера.
Грузоподъемные суда и платформы. Для подъема затонувших судов еще недавно строились или оборудовались специальные судоподъемные суда. Установленные на них грузоподъемные средства позволяли поднимать суда небольшого водоизмещения с ограниченной глубины. В настоящее время в этом подклассе судов произошли серьезные изменения. Еще в недалеком прошлом глубины, с которых подъем затонувших объектов считался возможным и рациональным, не превышали 100 м. Теперь созданы средства подъема с океанских глубин. Список поднимаемых объектов непрерывно расширяется. Таким образом, грузоподъемные суда уже не простаивают от одной судоподъемной операции до другой. Экономичность их использования возрастает.
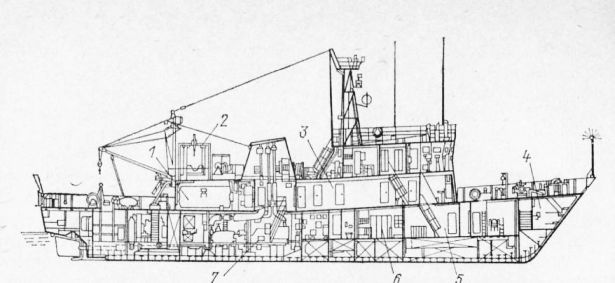
Рис. 14. Морской водолазный бот «Краб».
1 — деком прессионная камера; 2— спуско-подъемное устройство; 3 — каюты командного состава; 4 — форпик; 5 — каюты рядового состава; 6 — каюты младшего командного состава; 7 — машинное отделение.
Грузоподъемное судно «Алкоа Сипроб» построено в США в 1970 году1. Корпус судна изготовлен из алюминиевого сплава. В средней части судно имеет буровую вышку-кран грузоподъемностью 450 т. Передача усилий на поднимаемый объект осуществляется не с помощью стальных тросов, как это обычно делалось, а с помощью труб, изготовленных из высокопрочной стали. Внутри труб при их погружении остается воздух, который обеспечивает плавучесть труб, частично компенсируя их массу. На судне применены трубы диаметром 114,3 мм. Длина отдельных секций, из которых собирается подъемная линия, составляет 18,3 м. Скорость спуска и подъема линии труб, с учетом их механизированной сборки или разборки, составляет 18,3 м/мин. По трубе проходят водяная и воздушная магистрали.
На первом этапе освоения судна разработана своеобразная технология подъема объектов с глубины 1800 м. Учитывая собственную массу подъемной линии, на этой глубине с помощью крана удается обеспечить грузоподъемность в 200 т. Для подъема объектов, имеющих значительно большую массу, используют специальные устройства — захват-понтоны и компенсационный метод подъема. Его сущность заключается в следующем: масса поднимаемого объекта в основном компенсируется на объекте, небольшая часть компенсированной массы приходится на кран судна, и с его помощью производится управление подъемом.
Представление о захват-понтоне может дать рис. 16, на котором изображено захватно-подъемное устройство, запатентованное в США. Оно включает в себя захват в виде храпцев и три понтона: средний (основной) и два боковых. Боковые понтоны служат для сжимания захватов и выравнивания крена, если он возникнет. В понтонах установлены контрольно-отсекательные трубки с гидравлическим дистанционным управлением. С помощью трубок устанавливается величина продуваемого объема понтона, который сохраняется постоянным в процессе подъема, т. к. расширяющийся воздух выходит через трубки и уровень воды в понтоне всегда совпадает с нижней кромкой отсекателыюй трубки. Масса самого захватно-подъемного устройства под водой компенсируется, его перемещение обеспечивается с помощью специальных дистанционно управляемых движителей.
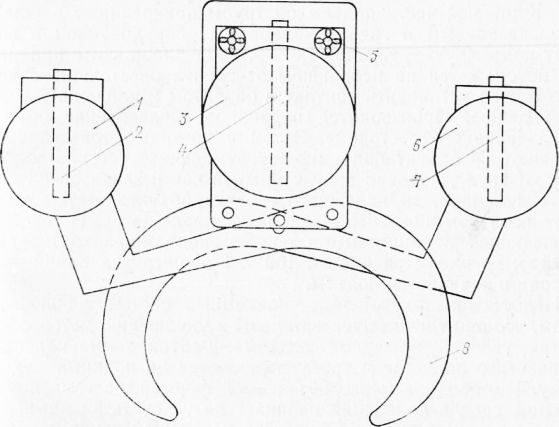
Рис. 15. Захватно-подъемное устройство.
1,6 — боковые понтоны; 3 — средний понтон; 2, 4, 7 — контрольно-отсекатель-ные трубки; 5 — движители; 8 — захваты.
Аналогичное по принципу действия устройство применяется на грузоподъемном судне «Алкоа Сипроб». Для промывки грунта под захватной частью используется вода, подаваемая под давлением по водяной магистрали подъемной линии. Продувание понтонов осуществляется воздухом. Разработана оригинальная система подачи сжатого воздуха. Воздушная магистраль состоит из большого числа трубочек малого диаметра — капиллярных сосудов. В специальную камеру — ресивер попеременно подается сжатый воздух и впрыскивается вода. От ресивера они и поступают в магистраль, создавая в трубочках столбики воды и воздуха. Столбики воды своей массой создают дополнительное давление на столбики воздуха. Это позволяет уменьшить давление подаваемого в ресивер воздуха и продувать понтоны с помощью обычных компрессоров, создающих давление до 9,81 • 106 Па (100 атм).
Технология выполнения подъема объекта с океанской глубины для данного судна принята следующей. С помощью радиотехнических средств выходят в точку над объектом подъема. К нижней части подъемной трубы прикрепляют площадку с телевизионным и гидролокационным оборудованием и опускают подъемную трубу до тех пор, пока площадка с аппаратурой не окажется на небольшом от грунта расстоянии, с которого можно установить контакт с объектом и наблюдать его по телевидению. Производится подробное обследование объекта, определение его состояния. Затем с помощью той же трубы опускают на объект подъемно-захватывающее устройство. Размывают грунт, подавая воду к нижней части захватов по водяной магистрали, до надежного захвата объекта. Затем продувают воздухом понтоны, пока подъемная нагрузка системы, включающей поднимаемый объект и подъемно-захватное устройство, не окажется равной 100 т. Эта нагрузка принимается на кран и начинается подъем.
Недостаток такого вида подъемных систем заключается в том, что они весьма чувствительны к ухудшению метеорологических условий во время подъема. Вертикальные колебания судна через подъемную трубу передаются на поднимаемую систему. Но, обладая плохо обтекаемой формой, система при некотором уровне колебаний начинает не успевать за ними. При этом возможно появление усилий в подъемной трубе, во много раз превышающих расчетные, и разрыв ее.
Грузовая платформа — более надежное плавучее грузоподъемное средство. Платформы с малым диаметром стоек имеют на волнении вертикальные колебания весьма малой амплитуды и большого периода. Это позволяет не только исключить рывки в подъемной линии, но и повысить степень компенсации подъемной нагрузки объекта за счет понтонов. На практике данное положение может привести к тому,, что с помощью платформ небольшой грузоподъемности будет возможно поднимать большие по массе объекты.
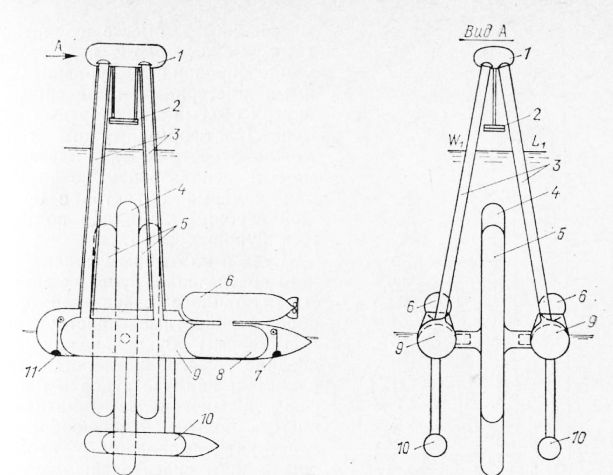
Рис. 16. Грузовая платформа.
1 — верхняя камера; 2 — подъемная площадка; 3 — стойки; 4 — сборно-подъемная камера; 5 — транспортные камеры; 6 — самоходные подводные аппараты; 7— кормовой подводный якорь; 8 — декомпрессионная камера; 9 — жилой отсек; 10 — подвижный балласт; 11 — носовой подводный якорь.
Платформа отличается тем, что между ее горизонтальными поплавками помещена на осях сборно-подъемная камера (рис. 18). В этой камере с помощью манипуляторной системы производится сборка и разборка подъемной линии. Здесь же расположены спуско-подъемное устройство и мотор вращения линии. Внутри камеры выделено несколько уравнительных цистерн для компенсации массы подъемной линии и самой камеры. Трубы (штанги), из которых составляется линия, подаются в транспортных камерах. Штанги внутри транспортных камер находятся на барабанах, поворачивающихся по мере выбора штанг. К центральной сборно-подъемной камере транспортные камеры крепятся с помощью стыковочного узла и захватов. Подача штанг в транспортных камерах удобна тем, что
масса камер вместе со штангами может быть под водой компенсирована уравнительными цистернами, выделенными внутри объема транспортных камер. Платформу такого типа можно отнести к мини-платформам и использовать не только для подъема объектов с большой глубины, но и для подводных буровых работ.
Суда и платформы спасательного обеспечения буровых работ. Этот подкласс спасателей приобрел конкретные конструктивные формы буквально за последние годы. Особенностью его является: наличие судов и платформ с многоцелевым назначением, большое разнообразие конструктивных форм у входящих в него спасателей: здесь и обычные надводные суда, и суда с малой площадью ватерлинии, и полупогружные платформы.
Судно «Стена Констрактор» шведской постройки. Назначение: проведение аварийно – спасательных, подводно-технических работ и транспортировка личного состава и грузов на место бурения скважин. Судно имеет полубак и развитую носовую надстройку. Крыша надстройки служит посадочной площадкой для вертолета. Главная энергетическая установка состоит из пяти дизель-генераторов мощностью по 1650 кВт при 1000 об/мин. В движительный комплекс судна входят: гребной винт регулируемого шага (основной движитель), две винторулевые колонки в корме и два подруливающих устройства в носовой части судна. Указанный комплекс обеспечивает хорошие маневренные качества как на больших, так и на малых скоростях хода.
На судне установлен палубный водолазный комплекс, рассчитанный на 12 чел. и трехнедельный срок работы. Спуск водолазов к месту работы осуществляется с помощью водолазного колокола, имеющего глубину погружения 450 м. На судне — мощные противопожарные средства и несколько кранов. Они перечислены в Приложении. Система динамического удержания над местом работ позволяет выполнять подводные работы на больших глубинах, где постановка рейдового оборудования становится нерациональной.
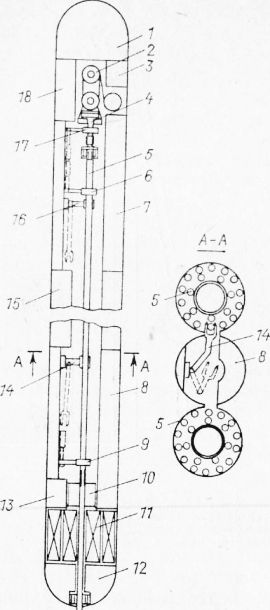
Рис. 17. Сборно-подъемная камера грузовой платформы.
1, 3, 7, 8, 12, 13, 15, 18 — отсеки уравнительной цистерны; 2 — спуско-подъ-емный механизм; 4— верхняя головка подъемной линии; 5 — штанги; 6, 9, 17 — манипуляторы центровки штанг; 10 — стопор; 11 — мотор вращения; 14, 16 — манипуляторы перемещения штанг.
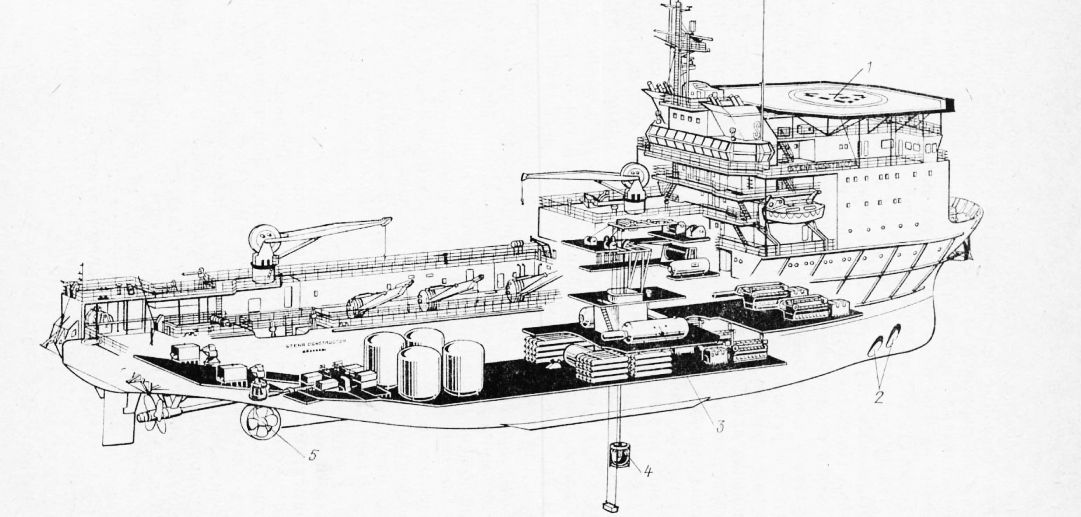
Рис. 18. Судно «Стена Констрактор».
1 — вертолетная площадка; 2 — носовые подруливающие устройства; 3 — дс-компрессионная камера; 4 — водолазный колокол; 5 — винторулевая колонка
Полупогружные платформы используются наряду с надводными судами для спасательного обеспечения буровых работ. Поскольку буровые работы ведутся в большом удалении от баз в сложнейших метеорологических условиях, приходится создавать такие спасатели, которые могли бы постоянно находиться в районе работ, независимо от погодных условий. Этим требованиям и удовлетворяют полупогружные платформы. Так, японская самоходная платформа водоизмещением 27 400 т выполняет спасательные работы и ремонт подводных трубопроводов. Основные характеристики ее приведены в Приложении. В качестве движителей применены четыре поворотные винто-рулевые колонки (винты регулируемого шага, насадки, поворачивающиеся вместе с винтами на 360°). Система динамического удержания обеспечивает нахождение платформы над местом работ при морских течениях до 1,5 уз и волнении моря до 9 баллов. Палубный водолазный комплекс позволяет водолазам работать в режиме длительного пребывания под давлением. Спуск водолазов осуществляется с помощью двух водолазных колоколов. Предусмотрена возможность использования автономных подводных аппаратов. На платформе мощные противопожарные средства, поворотные краны.
Спасательные катера. Их основным назначением является спасение людей при авариях судов и самолетов. Чаще всего пострадавшие удерживаются на воде на спасательных средствах: надувных спасательных плотах, шлюпках, резиновых лодках. Катер «Ион Эсбергер» (ФРГ)1 обладает хорошими ходовыми и маневренными качествами. Для достижения высокой скорости хода (свыше 30 уз) в конструкции корпуса применены легкие сплавы и специальная система набора. Главная механическая установка состоит из дизеля среднего вала мощностью 3310 кВт (4500 л. с.) в форсированном режиме и двух дизелей мощностью 990 кВт (1350 л. е.), подключенных к бортовым валам. В качестве движителей использованы винты регулируемого шага. Рули установлены за винтами. Имеется подруливающее устройство с двигателем мощностью 58 кВт (80 л. е.). На катере предусмотрен отбор неиспользованной мощности от дизель-генераторов с передачей на бортовые валы. Установлены два вспомогательных дизеля мощностью 110 кВт (150 л. с.) каждый. Они обеспечивают наиболее экономичный режим малой скорости хода (7—9 уз), при котором дальность плавания катера составляет 6000 миль. При скорости хода в 30 уз она уменьшается до 600 миль.
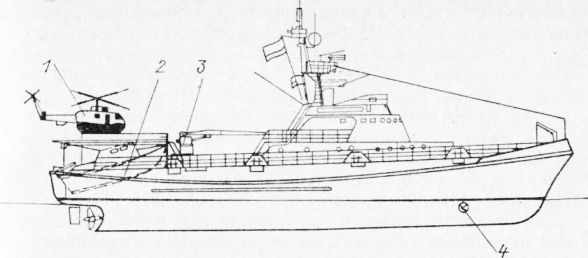
Рис. 19. Спасательный катер «Ион Эсбергер».
1 — вертолет; 2 — бортовый катер; 3— поворотный кран; 4—подруливающее устройство.
В специальное оборудование входят: бортовый катер не-опрокидываемой конструкции (катер, будучи перевернутым, возвращается в прямое положение), который расположен в корме спасательного катера на наклонных полозьях и легко сбрасывается в воду. Скорость бортового катера 15 уз. Он имеет небольшое радарное устройство, радиостанцию, эхолот, осушительную систему, т. е. приборы и системы, позволяющие катеру плавать на небольшие расстояния и самостоятельно; поворотный гидравлический кран для подъема плавающих плотиков и надувных шлюпок вместе с личным составом; противопожарные средства: пожарный насос, лафетный ствол, расположенный на площадке мачты, системы пенотушения и водяных завес; вертолет, обеспечивающий возможность совместного выполнения поисковых и спасательных работ. По данным испытаний, небольшой вертолет производил посадку и взлет с вертолетной площадки катера при высоте волн примерно 2,5 м.