Синхронные электродвигатели являются наиболее распространенным типом гребных двигателей в ГЭУ переменного тока. Это объясняется рядом существенных преимуществ синхронных гребных двигателей, таких, как более высокий к. п. д., достигающий 97,5%/т. е. на 3—5% выше, чем у асинхронных, меньшие масса и стоимость, работа в номинальных режимах при cos <р = 1. Большие воздушные зазоры синхронных двигателей, в несколько раз превытающие воздушные зазоры асинхронных электродвигателей, облегчают условия эксплуатации и ремонта подшипников ротора.
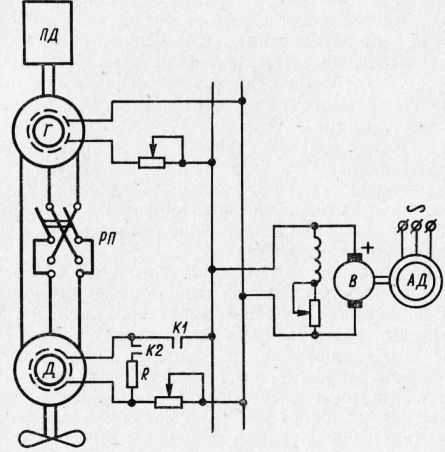
Рис. 1. ГЭУ переменного тока с синхронным гребным электродвигателем.
На рис. 1 представлена принципиальная схема ГЭУ переменного тока с синхронным гребным электродвигателем. Для питания цепей возбуждения синхронного генератора Г и синхронного гребного электродвигателя Д предусматривается возбудительный агрегат, состоящий из возбудителя В и его приводного двигателя, в качестве которого обычно используются короткозамкнутые асинхронные электродвигатели АД, включаемые в судовую сеть переменного тока. Навешивание возбудителя на генераторный агрегат ГЭУ переменного тока недопустимо, так как синхронный генератор может работать с переменными угловыми скоростями для регулирования частоты тока в ГЭУ.
Помимо обмотки возбуждения, питаемой постоянным током от возбудителя, синхронные гребные электродвигатели имеют коротко-замкнутую пусковую обмотку, выполненную в виде беличьего колеса из медных или латунных стержней, замкнутых на кольцевые сегменты.
В период пуска гребного синхронного электродвигателя его обмотка возбуждения отключается от возбудителя — контакт К1 разомкнут. Вращающий момент в двигателе в период пуска обусловливается только пусковой обмоткой. Вследствие этого явления, протекающие при включении гребного синхронного двигателя на напряжение синхронного генератора, имеют полную аналогию с явлениями, протекающими при пуске асинхронного гребного электродвигателя, рассмотренными в предыдущем параграфе. Механическая характеристика в этот период аналогична механической характеристике асинхронного электродвигателя при Rpcr = О, так как пусковая обмотка ротора синхронного двигателя не имеет внешнего сопротивления, а замкнута накоротко.
Рассмотренный способ пуска гребного синхронного электродвигателя носит название асинхронного пуска синхронного двигателя.
После того как в процессе разгона с помощью пусковой обмотки синхронный двигатель достигнет угловой скорости, составляющей около 95% номинальной и носящей название подсинхронной скорости, контакт Д7 замыкается и обмотка возбуждения подключается на напряжение возбудителя. Магнитный поток обмотки возбуждения, расположенной на полюсах ротора, сцепляется с вращающимся магнитным потоком статора, и ротор втягивается в синхронизм: начинает вращаться с той же угловой скоростью, с какой вращается магнитное поле статора, т. е. с синхронной скоростью. На этом пуск гребного синхронного двигателя заканчивается.
На период пуска, когда гребной синхронный электродвигатель развивает вращающий момент только благодаря работе пусковой обмотки, обмотка возбуждения двигателя отключается контактом К1 от возбудителя, а контактом К2 включается на разрядное сопротивление R. В противном случае при больших скольжениях, т. е. при малых угловых скоростях ротора, в обмотке возбуждения двигателя будет наводиться недопустимо большое напряжение, опасное для изоляции.
Так как по окончании процесса пуска ротор синхронного двигателя, а следовательно, пусковая обмотка двигателя, вращается с той же скоростью, что и поле статора, то в пусковой обмотке э. Д. с. не наводится, ток не протекает и ее вращающий момент равен нулю.
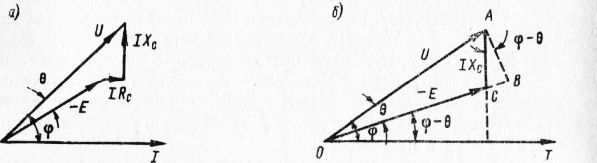
Рис. 2. Векторная диаграмма синхронного двигателя.

Рис. 3. Угловая (о) и механическая (б) характеристики синхронного электродвигателя.
Угол в формуле вращающего момента синхронного двигателя носит название угла нагрузки. Действительно, с увеличением нагрузки на валу двигателя растет его ток, падение напряжения в сопротивлении статора и угол увеличиваются, как это видно из векторных диаграмм, приведенных на рис. 88. Зависимость вращающего момента синхронного двигателя от угла нагрузки, т. е. зависимость М = f (0), называется угловой характеристикой синхронного двигателя. Следует учесть, что вектор э. д. с. Е связан с полем ротора, а вектор напряжения U — с полем статора. Тогда из анализа угловой характеристики видно, что если ротор двигателя сместится относительно поля статора на угол более 90 эл. град, то его момент начнет убывать и двигатель выпадет из синхронизма. Максимальный момент, развиваемый синхронным двигателем в синхронном режиме работы, наступает при 0 = 90°.
Описанные соотношения справедливы для неявнополюсного высокооборотного синхронного двигателя, однако без значительной погрешности они могут быть приняты и для явнополюсных двигателей, какими обычно являются гребные синхронные электродвигатели.
Таким образом, в синхронном режиме синхронный двигатель работает с постоянной угловой скоростью, равной синхронной угловой скорости поля статора. Механическая характеристика синхронного двигателя представлена на рис. 3, б.
Из этого уравнения видно, что скорость гребного синхронного двигателя можно регулировать только двумя способами: изменением числа пар полюсов р и изменением частоты напряжения, подводимого к двигателю.
Первый способ практически не применяется, так как он связан с усложнением конструкции гребного двигателя. Кроме того, этот способ дает возможность регулировать угловую скорость только ступенями при малом количестве ступеней.
Второй способ регулирования угловой скорости — изменением частоты — широко используется на практике. Однако, как уже известно, он связан с необходимостью изменения угловой скорости приводного двигателя синхронного генератора или установки преобразователя частоты.
Реверс гребного синхронного электродвигателя осуществляется путем переключения двух фаз обмотки статора с помощью реверсивного переключателя. В период реверсирования двигателя он работает с выключенным возбудителем ротора и все процессы протекают точно так же, как в ГЭУ с асинхронным гребным электродвигателем.
Из указанных для гребных асинхронных электродвигателей трех способов увеличения вращающего момента в период реверса для синхронного гребного электродвигателя приемлемы лишь два: уменьшение частоты и увеличение подводимого напряжения. Изменение формы механической характеристики с помощью сопротивления в цепи ротора для синхронного гребного электродвигателя неприемлемо, так как пусковая обмотка его замкнута накоротко.
В результате реверсирование гребного синхронного электродвигателя с короткозамкнутой пусковой обмоткой осуществляется в следующем порядке:
1) снижается угловая скорость приводных двигателей синхронных генераторов, тем самым снижается частота напряжения, подводимого к гребному электродвигателю;
2) снимается напряжение с обмотки возбуждения генераторов и гребного электродвигателя;
3) с помощью реверсивного переключателя переключаются две фазы гребного двигателя;
4) при снятом возбуждении на двигателе подается увеличенное возбуждение на генераторы;
5) после реверсирования вала гребного двигателя и разгона ротора двигателя до подсинхронной скорости, соответствующей пониженной частоте напряжения, в цепь возбуждения двигателя подается номинальное напряжение и двигатель втягивается в синхронизм;
6) напряжение возбуждения генераторов снижается до номинального, угловая скорость приводных двигателей и частота тока доводятся до номинальных значений.
Описанный порядок соответствует реверсированию гребного синхронного электродвигателя с полной угловой скорости в одном направлении до полной угловой скорости в обратном направлении.
В отдельных системах ГЭУ с синхронными гребными электродвигателями перед реверсированием, т. е. непосредственно перед переключением фаз статора двигателя, осуществляется его динамическое торможение. С этой целью статор гребного электродвигателя, отключенный от шин электродвижения, подключается на тормозное сопротивление, а в цепь возбуждения двигателя подается напряжение возбуждения. В таком режиме гребной двигатель работает как генератор, приводимый во вращение гребным валом, причем энергия вращения вала превращается в тепловую энергию в тормозном сопротивлении и рассеивается. Использование динамического торможения гребного синхронного электродвигателя перед реверсированием снижает величину тормозных моментов, потребных для изменения направления вращения гребного вала. Однако, как видно из описания процесса динамического торможения, система управления гребным двигателем в этом случае усложняется, так же как усложняются операции при реверсировании.
Обладая более высоким к. п. д., меньшими массой и стоимостью, чем другие ГЭУ переменного тока, гребные установки с синхронными электродвигателями наряду с этими положительными качествами имеют существенные недостатки. К ним относятся худшие, чем у асинхронных электродвигателей, пусковые характеристики гребных синхронных двигателей, меньшая перегрузочная способность. -
Давая общую оценку ГЭУ переменного тока с гребными синхронными электродвигателями, следует отметить, что этот тип ГЭУ более экономичен и надежен в эксплуатации, но имеет худшие маневренные качества, чем ГЭУ с гребными асинхронными электродвигателями.