Гребные- электрические установки с асинхронными электродвигателями с фазными роторами обладают более высокими маневренными качествами по сравнению с другими ГЭУ переменного тока.
Принципиальная схема ГЭУ переменного тока с асинхронным электродвигателем с фазным ротором представлена на рис. 81. Схема включает в себя приводной двигатель ЯД, синхронный генератор Г, гребной электродвигатель Д, реверсивный переключатель РП, реостат Rper и возбудительный агрегат, состоящий из генератора постоянного тока — возбудителя В и его приводного двигателя — короткозамкнутого асинхронного электродвигателя АД.
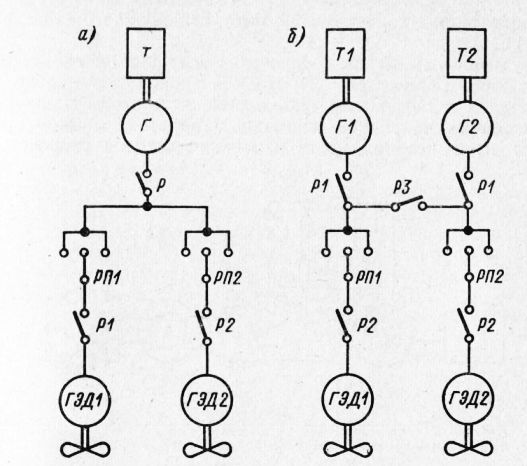
Рис. 1. Схемы главного тока ТЭГУ переменного тока.
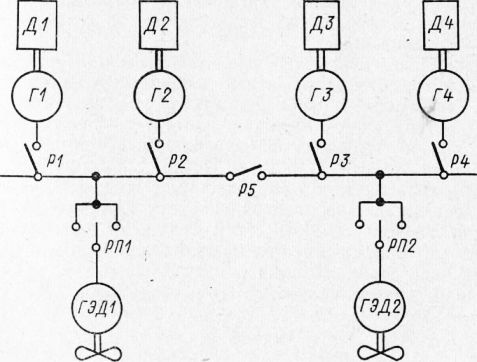
Рис. 2. Схема главного тока ДЭГУ переменного тока.
Возбудительный агрегат предназначен для питания обмотки возбуждения генератора. Приводной двигатель возбудителя включается в общесудовую сеть переменного тока. Навешивание возбудителя на приводной двигатель генератора обычно не применяется из-за необходимости изменения угловой скорости генераторов.
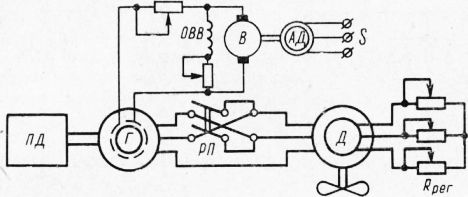
Рис. 3. Принципиальная схема ГЭУ переменного тока с асинхронным гребным электродвигателем с фазным ротором.
Как всякий электродвигатель переменного тока, асинхронный двигатель с фазным ротором состоит из статора и ротора. На статоре размещается трехфазная обмотка, соединяемая в треугольник или в звезду и подключаемая к генератору через шины электродвижения.
Особенностью двигателя является наличие трехфазной обмотки на роторе, каждая фаза которой выведена на контактное кольцо. Посредством трех контактных колец, установленных на валу ротора, и скользящих контактов — щеток трехфазная обмотка ротора выведена на регулируемый трехфазный реостат /?рег. Наличие реостата в цепи ротора асинхронного электродвигателя позволяет в определенных пределах осуществлять плавное регулирование угловой скорости гребного вйла.
Вращающееся магнитное поле статора, пересекая обмотку ротора, наводит в ней э. д. е., а так как эта обмотка замкнута через контактные кольца на сопротивление реостата, то по ней потечет ток. Ток обмотки ротора, взаимодействуя с вращающимся магнитным потоком статора, образует вращающий момент ротора, вызывающий вращение ротора двигателя.
На рис. 82 приведены механические характеристики асинхронного гребного электродвигателя с фазным ротором при различных сопротивлениях в цепи ротора. Как видно из этого рисунка, увеличение сопротивления ротора увеличивает наклон механической характеристики и критическое скольжение и снижает значение угловой скорости двигателя при одном и том же значении вращающего момента.
Вращающий момент Ми двигателя при включении статора и при угловой скорости, равной нулю, называется пусковым или начальным моментом. Его величина при выведенном реостате в цепи ротора, т. е. при работе двигателя на естественной механической характеристике, составляет (1 — 1,8)Мном. Введение сопротивления в цепь ротора увеличивает пусковой момент двигателя.
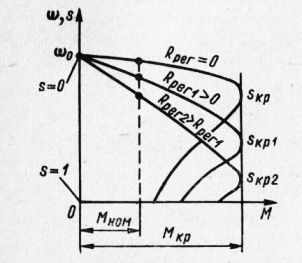
Рис. 4. Механические характеристики гребного асинхронного электродвигателя с фазным ротором.
Помимо использования реостата в цепи ротора возможны еще два способа регулирования угловой скорости гребного асинхронного электродвигателя с фазным ротором:
1) изменением числа пар полюсов обмоток статора и ротора и 2) изменением частоты напряжения, подводимого к двигателю. Эти способы вытекают из рассмотрения уравнения угловой скорости двигателя:
Первый из указанных способов практически не применяется, так как требует использования более дорогого и тяжелого гребного двигателя специальной конструкции, имеющего несколько обмоток с различным числом пар полюсов или одну обмотку, допускающую переключение числа пар полюсов статора и ротора. Кроме того, регулирование получается ступенчатым с небольшим количеством ступеней (две — три).
На рис. 5,а показаны механические характеристики гребного асинхронного электродвигателя при изменении частоты питающего напряжения. Как видно, этот способ обеспечивает плавное регулирование скорости, диапазон которого зависит от диапазона регулирования угловой скорости приводного двигателя синхронного генератора. Необходимость регулирования угловой скорости приводного двигателя намного снижает достоинства рассматриваемого способа регулирования угловой скорости гребного электродвигателя. Регулирование частотой применяется обычно при пусках и реверсах гребного электродвигателя.
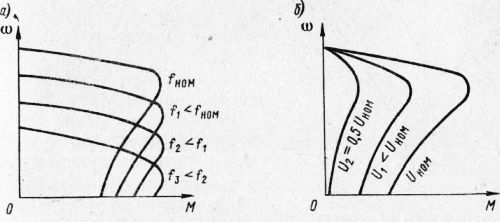
Рис. 5. Механические характеристики асинхронного электродвигателя при изменении частоты (а) и напряжения (б).
Большое влияние на электромеханические свойства гребного асинхронного электродвигателя оказывает величина подводимого к двигателю напряжения. Изменение ее очень мало влияет на угловую скорость двигателя, так как синхронная угловая скорость поля от напряжения не зависит. Однако напряжение оказывает большое влияние на величину вращающего момента двигателя: вращающий момент асинхронного двигателя пропорционален квадрату подводимого напряжения. На рис. 83,6 представлены механические характеристики гребного асинхронного электродвигателя при различных значениях подводимого напряжения.
Зависимость вращающего момента асинхронного гребного электродвигателя от напряжения широко используется для форсирования реверса ГЭУ и реверса судна.
Принципиально для реверсирования асинхронного гребного электродвигателя достаточно переключить две фазы его статора с помощью реверсивного переключателя. В этом случае направление вращения магнитного поля статора изменяется на противоположное и двигатель реверсируется.
Однако особенности работы асинхронного электродвигателя в составе гребной электрической установки существенно усложняют операции по реверсированию двигателя.
Прежде всего перед отключением и переключением реверсивного переключателя необходимо снять возбуждение синхронного генератора, чтобы переключение цепи главного тока осуществлялось без напряжения. Это позволяет намного упростить конструкцию реверсивного переключателя. Кроме того, простое переключение с целью реверсирования двух фаз двигателя значительно затягивает реверсирование судна.
Действительно, рассмотрим совместно реверсивную характеристику гребного винта и механические характеристики асинхронного двигателя в период реверсирования.
Работа ГЭУ при направлении вращения гребного электродвигателя, соответствующем полному ходу вперед, характеризуется точкой В— точкой пересечения механической характеристики двигателя ABCDE с характеристикой момента сопротивления на гребном валу Мв. В этом режиме двигатель вращается с номинальной угловой скоростью и развивает номинальный вращающий момент.
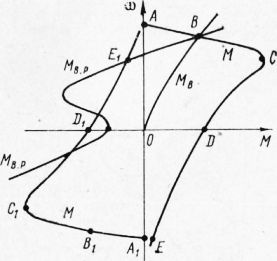
Рис. 6. Реверсивные характеристики ГЭУ с асинхронным гребным электродвигателем.
При значительных скольжениях существенно возрастает частота тока в роторе, равная частоте тока в статоре, умноженной на скольжение. Вместе с тем соответственно увеличивается индуктивное сопротивление ротора, пропорциональное частоте тока статора. В результате ощутимо снижается величина cos ср2.
Описанные явления приведут к тому, что, работая в режиме, характеризуемом точкой Еь двигатель будет обтекаться значительным током, перегревающим машину,“ а развиваемый момент будет очень малым. Гребной электродвигатель в этих условиях не сможет не только реверсировать гребной винт, но даже затормозить его, и время реверса недопустимо затянется.
Необходимо принимать эффективные меры по значительному увеличению момента асинхронного двигателя в период реверсирования судна. Возможны три способа приведения вращающего момента гребного асинхронного электродвигателя с фазным ротором в соответствие с моментом сопротивления на валу в период реверсирования:
1) снижение частоты, 2) введение сопротивления в цепь ротора и 3) увеличение напряжения, подводимого к двигателю, путем увеличения тока возбуждения генератора. Влияние каждого из этих способов на форму механической характеристики двигателя рассмотрено выше.
Обычно реверсирование ГЭУ осуществляется с одновременным использованием всех трех указанных способов. В результате процесс реверсирования ГЭУ с асинхронным электродвигателем с фазным ротором протекает следующим образом.
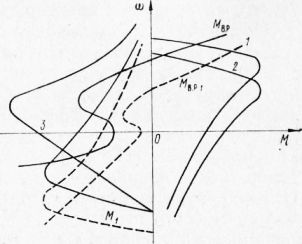
Рис. 7. Реверсивные характеристики ГЭУ с асинхронным гребным электродвигателем при изменении частоты, сопротивления в цепи ротора и подводимого напряжения.
Перед реверсированием снижается угловая скорость приводного двигателя синхронного генератора по сравнению с номинальной. Соответственно снижается частота напряжения, подводимого к двигателю, и его механическая характеристика приобретает форму кривой. Далее снимается возбуждение с синхронного генератора, переключается реверсивный переключатель, в цепь ротора двигателя вводится сопротивление, увеличивается возбуждение синхронного генератора до максимального, и критический (максимальный) момент двигателя значительно возрастает. После того как винт реверсируется, фор-сировка возбуждения генератора снимается, сопротивление из цепи ротора двигателя выводится, угловая скорость двигателя и частота тока увеличиваются, а вместе с этим угловая* скорость гребного вала также увеличивается при вращении винта в обратную сторону.
Обладая относительно высокими маневренными качествами, гребные асинхронные электродвигатели с фазным ротором наряду с этим имеют и существенные недостатки. Коэффициент полезного действия и coscp этих двигателей ниже, чем у синхронных, причем значения коэффициента мощности особенно снижаются при перегрузках. В результате при одинаковой мощности на гребном валу для питания асинхронного двигателя потребуется генератор более мощный, чем для питания синхронного двигателя. Наличие пусковых и регулировочных сопротивлений также увеличивает массу и стоимость ГЭУ в целом, а наличие контактных колец на роторе снижает надежность установки. Эксплуатация ГЭУ с асинхронными двигателями с фазным ротором, в частности при осуществлении частых реверсов, связана с необходимостью в строгой последовательности манипулировать частотой и напряжением генераторов и сопротивлениями в цепи ротора гребного электродвигателя.
Отмеченные недостатки в большой мере ограничивают область применения ГЭУ переменного тока с асинхронными гребными электродвигателями с фазным ротором.