Общая структура программы. Программа автоматики судовой сети построена в принципе аналогично программе автоматики дистанционного управления пропульсивными установками. Как видно из рис. 1, эта программа также имеет иерархическую структуру. Она подразделяется на уровни управления процессом, функциональных групп и индивидуального управления.

Рис. 1. Структура автоматики судовой сети (иерархия программ).
На уровне управления процессом осуществляется автоматическое ведение процесса в целом, важнейшей задачей которого является установление наиболее благоприятного распределения нагрузок по элементам установки. Затем программа управления процессом оказывает непосредственное воздействие на функциональные блоки относящихся к сети исполнительных устройств, таких, как секционные автоматы электростанции или отключающие устройства групп потребителей.
В соответствии с технологической структурой установки на уровне функциональных групп действуют в принципе одинаково построенные программы контроля и управления отдельных агрегатов, а также программа для вспомогательных устройств, общих для всех генераторных установок. Таким образом, относительно замкнутым технологическим комплексам придаются соответствующие программы. Этрм путем создается значительная автономия соответствующих чаётей общей программы и их взаимосвязь с вышестоящим уровнем управления процессом осуществляется через сравнительно небольшое
число каналов. В противоположном направлении программы функциональных групп связаны с относящимися к отдельным агрегатам функциональными блоками исполнительных устройств, как например серводвигателем для изменения частоты вращения вала дизеля или переключающим устройством генератора.
Программа управления процессом (ПУП). Программа управления процессом имеет разветвленную структуру, так что наглядное представление ее весьма затруднено. Ниже исходим из соответствующих частных задач, для каждой из которых поясняется функция программы управления процессом.
Функции программы управления процессом могут быть подразделены на следующие комплексы:
а) Распределение мощности. Цель этой части программы состоит в удовлетворении потребности в мощности всех приемников электроэнергии судовой сети. Основой для сравнения мощности служат информации о мощности сети, степени нагрузки, а также количестве работающих генераторов, которые поступают из программы функциональных групп отдельных агрегатов.
агрегаты не должны учитываться. Дополнительный агрегат включается с известной выдержкой времени уже тогда, когда в течение определенного времени превышается значение а = 0,85. Если же коэффициент загрузки превысит 105%, то осуществляется ускоренный запуск и подключение дополнительного агрегата.
Если тест покажет, что невозможно удовлетворить потребности при использовании всех имеющихся резервов, т. е. после подключения всех работоспособных агрегатов, то остается единственная возможность: отключить с известным ограничением потребители, которые не являются обязательно необходимыми для поддержания эксплуатации судна.
При наличии автоматического подключения к сети и отключения потребителей большой мощности с помощью программы управления может осуществляться профилактическая подготовка потребителей повышенной мощности. Перед подключением каждого крупного потребителя сначала проверяется, можно ли повышенную потребность в мощности удовлетворить из резерва работающих агрегатов. Если это невозможно, то подключение соответствующего потребителя временно блокируется и осуществляется ускоренный запуск и подключение нового генератора. Лишь после того как подключенный агрегат начнет давать мощность в общую сеть, блокировка снова снимается. Однако этот метод экономически оправдан только для крупных потребителей.
б) Управление генераторными агрегатами при уменьшении нагрузки. В особой части программы производится проверка на наличие так называемого случая малой нагрузки. Для этой цели с помощью теста проверяется, можно ли отключить один из работающих на сеть агрегатов без того, чтобы на оставшихся агрегатах нагрузка не превысила 85%. Однако при использовании этого критерия следует задавать несколько меньшее значение предела, для того чтобы избежать слишком частого подключения и отключения агрегатов.
в) Меры при неисправности агрегатов. Если у какого-либо агрегата будут установлены эксплуатационные неполадки, то в зависимости от степени опасности он должен быть выведен из эксплуатации немедленно, либо с выдержкой времени. Это осуществляется программой функциональных групп (см. стр. 221), относящейся к агрегатам, в которую и поступает вся информация о неполадках. Если в составе системы энергоснабжения еще имеется резервный агрегат, то подается команда на запуск его для компенсации потерь мощности.
г) Выполнение команд, вводимых вручную. При эксплуатации системы энергоснабжения судна в любое время возможно подключение и отключение вручную каждого агрегата. При этом автоматика выбирает другой подходящий работающий агрегат, который останавливается при включении резервного агрегата. При этом внутренней блокировкой можно обеспечить такое положение, что выбранный автоматикой агрегат будет отключаться лишь тогда, когда резервный агрегат начнет отдавать мощность в сеть.
д) Выбор агрегата. Если по одной из указанных выше причин принято решение о подключении или отключении одного из агрегатов, то должен быть произведен выбор наиболее подходящего для этой цели агрегата за исключением случая, когда эта проблема решается сама собой, как например при остановке неисправного агрегата.
При работе с простыми программами действует твердый цикл, в соответствии с которым подключается или отключается следующий, стоящий на очереди агрегат.
Более сложные программы учитывают при выборе количество часов, отработанных агрегатами, причем неработоспособный в данный момент агрегат автоматически исключается. На основе сравнения продолжительностей работы может осуществляться также и обычная (текущая) автоматическая смена агрегатов.
е) Меры при неисправностях сети. Тяжелые неисправности в сети могут быть, как правило, установлены на ранней стадии процесса уменьшения частоты. Может быть выведен критерий, выполнение которого обеспечивает своевременное отключение генераторов, работающих в данный момент на сеть. Если тем не менее произойдет затемнение, то включается ускоренный запуск. При этом после кратковременного затемнения потребители снова начинают снабжаться электроэнергией.
Автоматика должна также осуществлять эффективную защиту от коротких замыканий на сборных шинах, встречающихся крайне редко, но выводящих из действия систему энергоснабжения на длительное время. Изображенную на рис. 8.1 сеть можно разделить на две части. При возникновении короткого замыкания на шинах автоматика вызывает размыкание секционного автомата и разделяет тем самым сеть. После устранения короткого замыкания в неисправной части сети, относящиеся к сети генераторы снова подключаются.
Программа функциональных групп (ПФГ). Программа функциональной группы «генераторы электроэнергии» реализует в весьма высокой мере автоматическое управление и контроль всех процессов запуска, текущей работы и остановки агрегатов.
В соответствии с различными задачами на отдельных фазах эксплуатации программа функциональных групп подразделяется на следующие части:
— запуск дизеля;
— синхронизация и включение на параллельную работу;
— стабилизация частоты и распределение (уравнивание) активной нагрузки;
— контроль и меры при неполадках.
Взаимодействие отдельных секций программы в рамках автоматики функциональных групп иллюстрируется рис. 8.3. Эта схема показывает также информационные взаимосвязи программы функциональных групп с программой управления процессом, а также датчиками и блоками управления.

Рис. 2. Общая структура программы функциональных групп.
В — выключатель генератора; К — контактор манипуляторного типа; Г — генератор; Д — дизель; ПУП — программа управления процессом; ПФГ — программа функциональных групп; ГСП — группа «синхронизация и включение на параллельную работу»; ГЧН — группа «регулирование частоты и распределение (уравнение) активной нагрузки»; ГКЗ — группа «контроль и защита»; ГЗД — группа «запуск дизеля»; БУВ — блок управления «выключатель генератора»; БУД— блок управления «дизель».
Нижеследующее рассмотрение программы функциональных групп ведется в соответствии с указанным выше разделением программы на четыре части.
Запуск дизеля. Эта часть программы в значительной степени соответствует программе запуска дизелей пропульсивной установки судна. Однако в данном случае свойства установки учитываются не достаточно полно. Еще менее эти свойства учитываются в автоматике пуска дизеля аварийных агрегатов.
После трехкратного безуспешного запуска дальнейшие попытки прекращаются и сигнал об этом поступает в программу управления процессом.
Синхронизация и включение на параллельную работу. Проблема синхронизации заключается в безударном включении на параллельную работу вводимого в эксплуатацию генератора и судовой сети.
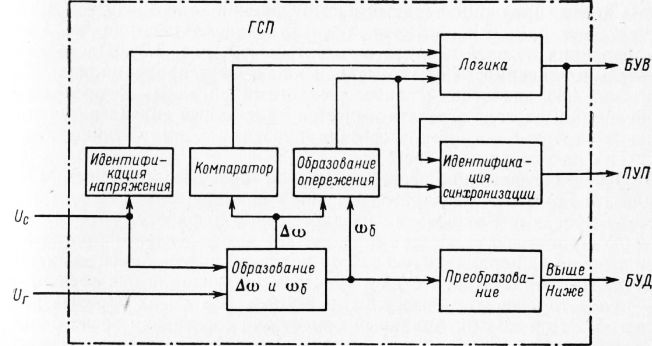
Рис. 3. Детализированная структура программы функциональной группы «синхронизация и включение на параллельную работу» (ГСП) по [8.8].
Условием такого включения является равенство напряжений, частот и фаз электродвижущих сил. Программа включения, с одной стороны, обеспечивает необходимые условия синхронизации, с другой стороны, осуществляет включение на параллельную работу.
Содержание программы представлено на рис. 8.4, включающем также внутреннюю структуру приведенного на рис. 8.3 блока ГСП.
а) Программа синхронизации. Так как условие равенства напряжения генераторов со стабилизацией напряжения можно считать практически выполненным, то задача первой части программы ограничивается уравниванием частоты генераторов и фазы с соответствующими значениями этих величин в сети. Это достигается управляющим воздействием на подачу топлива в первичные двигатели.
Когда после запуска дизеля напряжение генератора достигнет номинального значения, дальнейшее управление разгоном агрегата выполняется программой. При этом сначала производится согласование частот, а затем фаз. Для этой цели, как правило, производится
оценка разности частоты и фазы линейного напряжения сети и напряжения на клеммах генератора.
Сигнал, пропорциональный частоте биений, преобразуется в соответствующий исполнительный сигнал для воздействия на блок управления подачей топлива в двигатель. Преобразователь в зависимости от его исполнения выдает пропорциональный отклонению аналоговый, либо дискретный сигналы. В последнем случае при разгоне агрегата выдается длительный сигнал на увеличение частоты, а при пересинхронизации — импульсообразный сигнал на уменьшение частоты.
После согласования частот с заданной точностью (например 0,5*1 или 1,5 Гц) через компаратор выдается команда на введение в действие программы включения на параллельную работу.
б) Программа включения на параллельную работу. В программе включения на параллельную работу исходной информацией является также частота биения. Когда в процессе уравнивания она обратится в_нудь, то, очевидно, наступит равенство фаз обеих трехфазных систем. Это и есть оптимальный момент для соединения обеих сетей. «Следует однако учесть, что приводимый в действие автомат генератора имеет определенное собственное время срабатывания (порядка 300 мс). Для того чтобы обеспечить замыкание контактов в момент равенства частоты биений нулю, необходимо, чтобы управляющее i воздействие на автомат генератора опережало момент замыкания на величину собственного времени срабатывания. Следовательно, основная проблема этой части программы заключается в установлении соответствующего критерия , опережения.
Одно из возможных решений этой задачи сводится к тому, что необходимый сигнал на включение подается по величине частоты амплитуды биения, которая может иметь место при заданном времени опережения. Другое возможное решение, принцип которого иллюстрирован рис. 8.4, использует сдвиг во времени между обеими системами путем оценки напряжения биений. .
Недостаток такого способа формирования команды для включения на параллельную работу заключается в том, что мгновенные значения напряжения биений могут быть различными. Для компенсации этого явления используется разность частот.
Если сеть нестабильна, например судовая сеть, или у автомата генератора большой разброс времени срабатывания, то возникает опасность неправильной синхронизации. Этот недостаток может быть уменьшен за счет того, что параллельно автомату генератора с моторным приводом включается быстродействующий контактор. Необходимая последовательность операций управления этими двумя выключателями задается блоком управления автоматом генератора. Сначала ограниченной во времени командой на параллельную работу генераторного агрегата включается контактор манипуляторного типа. Затем блок-контакты этого контактора приводят в действие автомат генератора. После сигнала о выполнении команды контактор манипуляторного типа отключается от сети.
Если по истечении определенного промежутка времени не произойдет параллельного включения, то в программу управления процессом поступает сигнал о неправильной синхронизации и программа осуществляет запуск другого агрегата.
При отсутствии напряжения в судовой сети процесс синхронизации не производится.
Другой функцией автоматики является перевод уставки регулятора частоты вращения вало-дизеля после остановки дизеля на более низкое значение.
Стабилизация частоты и распределение (уравнивание) активной мощности. Определение числа агрегатов, необходимых для обеспечения потребителей электроэнергией, возлагается на программу управления процессом. Управление генерированием мощности отдельными агрегатами определяется программой функциональных групп. Поэтому автоматика должна решать две задачи. Во-первых, нагрузка отдельных агрегатов должна быть такой, чтобы частота судовой сети могла поддерживаться постоянной. Во-вторых, должно быть обеспечено определенное распределение нагрузки по агрегатам, участвующим в генерировании электроэнергии.
Для непрерывного выполнения этих условий необходимо применять специальное управляющее устройство.
Известно, что все электростанции объединены судовой сетью в многомерную взаимосвязанную систему управления. Выходными величинами объекта являются п + 1 измеряемых величин (составляющие активные мощности п агрегатов и частота сети). Управляющие воздействия на систему приложены к исполнительным органам управления расходом топлива дизелей.
Существуют различные способы построения структуры системы управления частоты и активной мощности. Однако в большинстве случаев предпочтение отдают так называемому регулированию по характеристикам.
а) Раздельное управление частотой и активной мощностью. Рассмотрим принцип регулирования частоты и активной мощности на наиболее простом примере — работе двух агрегатов. Соответствующая структура системы изображена на рис. 4. Предположим, что работает только один агрегат. При этом действует лишь
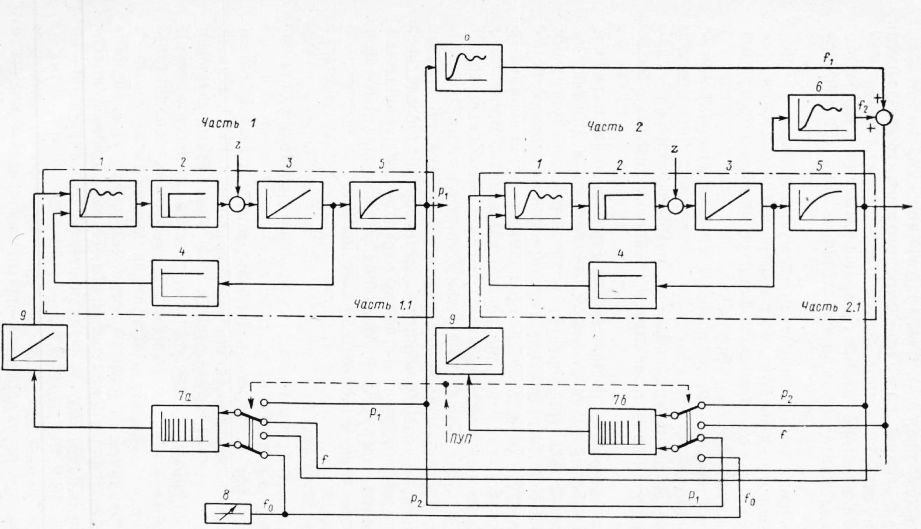
Рис. 4. Структура схемы раздельного управления частотой и активной мощностью при работе двух генераторов на сеть
Внутренний контур образуется цепью управления частоты вращения вала, которая из соображений надежности предусматривается на каждом дизель-генераторе. Цепь управления имеет в целом П-характеристику и таким образом обеспечивает статический принцип управления. Если предположить, что уставка п0 регулятора частоты вращения вала соответствует заданной частоте f0 сети, то машина при показанной настройке будет отдавать в сеть 50% номинальной мощности. Когда частота вращения вала или соответственно частота сети упадет до f = /0 — А/, то машина будет работать на сеть с полной мощностью.
На внутренний, контур стабилизации частоты вращения вала действует контур управления частотой энергосистемы. Выходные величины регулятора частоты (задающий регулятор) образуют задающее воздействие на центробежный регулятор.
Когда к сети подключается второй агрегат,необходимо произвести распределение (уравнивание) активных нагрузок между обеими машинами. Первый из включенных в работу дизель-генераторов принимается за задающую машину, на которую возлагается управление частотой. Система управления второгй агрегата производит уравнивание активных нагрузок.
Структура устройства уравнивания активных нагрузок весьма схожа с рассмотренной выше системой регулирования частоты. Задающий регулятор оценивает результаты измерений активной мощности, генерируемой обеими машинами, и действует, следовательно, как регулятор соотношений. Он выдает уставку для подчиненной ему цепи регулирования частоты вращения вала.
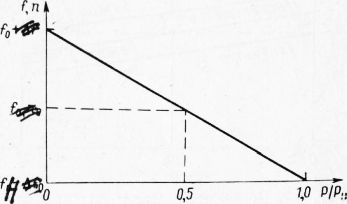
Рис. 5. Зависимость между частотой и мощностью дизель-генератора с пропорциональной характеристикой.
Для того чтобы избежать дополнительных затрат на выполнение схемы измерения активных мощностей, в большинстве случаев используют соответствующие статорные токи сети генераторов в качестве эквивалентных величин. Такое упрощение допустимо при применении генераторов стабилизированного напряжения, обмотки возбуждения которых включены параллельно, в результате чего реактивные мощности распределяются равномерно.
Принцип действия системы управления частотой и мощностью поясняется с помощью рис. 6, на котором изображены характеристики машин при параллельной работе двух агрегатов в двух различных режимах. Режим соответствует ситуации непосредственно после включения машины. Положение характеристики генератора показывает, что в данном случае для поддержания заданного значения частоты требуется отдача полной номинальной мощности. Характеристика машины определяется условием равенства частот. В начале переходного процесса включения на параллельную работу значительная мощность не отдается. Машина благодаря управлению активной мощностью начинает постепенно принимать нагрузку. В этом уравнительном процессе характеристики машин смещаются друг относительно друга (параллельный сдвиг). Процесс уравнивания будет завершен, когда характеристики обеих машин совместятся друг с другом (режим 2). Положение, которое при этом займут обе характеристики, зависит от доли нагрузки, приходящейся на каждую из машин, причем также должно быть выполнено требование в отношении стабилизации частоты (см. точку Е).
Если это состояние достигнуто, то нагрузки будут распределяться равномерно в течение всего периода работы. Поэтому система управления активной мощностью должна вступать в действие только при возникновении неравномерностей.
В устройстве управления, представленном на рис. 4, в качестве регулятора частоты или регулятора активной мощности используется трехпозиционный коммутационный элемент с гистерезисом и запаздывающей обратной связью. В этом случае при исполнительном механизме интегрального действия (серводвигатель регулятора частоты вращения вала) реализуется пропорционально-интегральный закон управления.
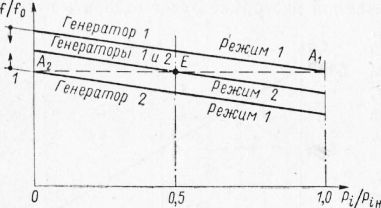
Рис. 6. Зависимость между частотой и мощностью при работе на сеть двух машин с управлением частотой и активной мощностью.
Решение о применении задающего регулятора в качестве регулятора частоты или активной мощности должно приниматься с учетом последовательности подключения агрегатов к сети. Так как этот порядок может меняться, то для эксплуатации системы требуется еще переключатель входных величин регулятора (действительные и заданные значения частоты или активные мощности агрегатов), а также при необходимости переключатель параметров управления.
Управление этими переключениями осуществляется логической схемой, которая по своему назначению должна быть отнесена к программе управления процессом. Она не только обрабатывает информацию о последовательности подключения агрегатов к сети, но и при отключении задающего агрегата выбирает другой работающий агрегат в качестве задающей машины.

Рис. 7. Детализированная структура программы функциональной группы «управление частотой и распределение активной мощности» (ГЧН).
Электроэнергетические системы крупных судов включают в себя, как правило, более, чем два генераторных агрегата. Поэтому условия формирования относительного критерия для управления активной мощностью являются более сложными. Последний формируется, как правило, в особом функциональном устройстве, которое оценивает количество работающих на сеть генераторов и их мощность по отношению к мощности сети. Затем в другом устройстве образуется параметр управления активной мощностью.
Общая структура такого раздельного управления частотой и активной мощностью судовой электростанции, включающей в себя нескольксг агрегатов (т > 2), представлена на рис. 7.
б) Комбинированное управление частотой и активной мощностью. Другой способ управления частотой и активной мощностью состоит в комбинации обеих этих функций, особымчпризнаком которой является отсутствие разделения на задающие и следящие агрегаты. Вместо этого все агрегаты в определенной степени участвуют как в регулировании частоты, так и в уравнивании активной мощности. Этот принцип приводит к применению трехконтурнойсистемы управления, причем на управление частоты вращения вала возлагается уравнивание активной мощности, а на последнее в свою очередь — управление частотой. Повышенные затраты на регуляторы здесь в известной мере компенсируются экономией на переключающих устройствах. Этот принцип регулирования до сих пор применялся только в крупных энергосистемах.
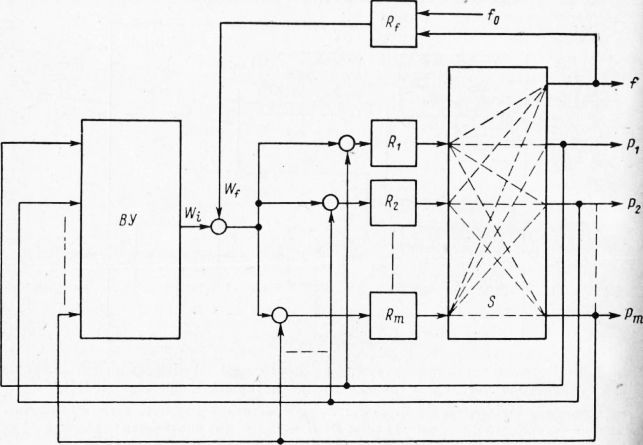
Рис. 8. Принцип гармонического управления.
в) Гармоническое управление частотой и активной мощностью. Описанные выше методы управления в большей или меньшей мере проблематичны, в отношении устойчивости.
Для того чтобы избежать затруднений, связанных с обеспечением устойчивости, предлагается применять принцип так называемого гармонического регулирования. Его особенность заключается в образовании внутренней заданной величины по результатам измерений мощности генераторов. Путем сравнения соответствующих действительных значений с внутренней заданной величиной определяются гармонические отклонения, которые образуют управляющие величины простых регуляторов. Образуемая таким путем система управления состоит из m-мерного контура гармонического управления для уравнивания активной нагрузки, на который налагается обычный контур автоматической стабилизации частоты. Принцип гармонического управления обеспечивает хорошую устойчивость, его реализация требует лишь незначительных затрат.
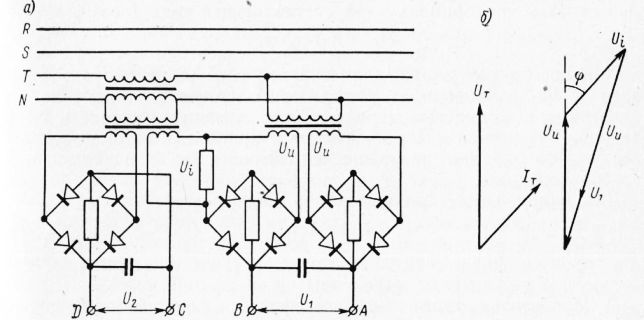
Рис. 9. Элемент для измерения напряжения и тока:
а — упрощенная схема; б — г векторные диаграммы.
Контроль и устранение неполадок. Задачей особой части программы функциональных групп является контроль за агрегатами (генератором, дизелем, а также некоторыми вспомогательными системами). Этот контроль служит для своевременного обнаружения как неисправностей и неполадок в технической системе, так и перегрузок агрегата. При возникновении неисправности или непредусмотренной перегрузки агрегата необходимо, чтобы автоматика не только выдавала информацию человеку, но и оказывала активное воздействие на ход процесса.
Функциональное назначение такой автоматики можно характеризовать следующими операциями: сбор информации, обработка информации, использование информации.
а) Сбор информации. Известную проблему в некоторых случаях представляет выбор подходящих критериев для определения наличия неисправностей и перегрузок агрегатов.
В качестве примера возьмем контроль за дизелем. Пригодными для этой цели параметрами состояния являются как температуры выхлопных газов в патрубках отдельных цилиндров (неполадки) или средняя температура выхлопных газов (нагрузка), так и положение тяг, регулирующих расход топлива (нагрузка). В большинстве случаев контролируются оба эти параметра.
Другой задачей является, определение нагрузки генераторов. Этот вопрос можно решать путем измерения температуры обмоток с помощью вмонтированных в них сопротивлений, величина которых зависит от температуры, а также путем измерения тока статора.
При постоянном напряжении судовой сети (применение генераторов стабилизированного напряжения) измеренное значение иг с достаточной точностью характеризует активную мощность генераторов. Так как знак U1 зависит от направления потока электроэнергии, это напряжение можно использовать также и для защиты от обратного тока.
по которому можно рассчитывать ток в сети. Показанные на рис. 9 измерительные элементы выполнены по трехфазной схеме.
б) Обработка информации. Классификация неполадок и нагрузок производится обычным способом по сигналам о предельных значениях параметров, причем измеренные значения подвергаются тесту на их принадлежность к допустимому или недопустимому диапазону.
В некоторых случаях для дифференцированной оценки степени опасности производится разбивка на три класса опасности.
Для оценки применяются, например, следующие критерии: по контролю генератора:
— слишком высокая температура обмотки;
— слишком большой ток генератора, по контролю дизеля:
— слишком высокая температура охлаждающей воды;
— слишком высокая температура смазочного масла;
— слишком низкое давление смазочного масла;
— слишком высокая температура выхлопных газов;
— слишком высокая частота вращения вала;
— слишком большое время установления полного расхода топлива.
Далее, сигнал о неполадке выдается при трех следующих друг за другом неудачных попытках запуска и неправильной синхронизации.
Для выявления технологических неполадок агрегата частично используются те же самые критерии, что и при защите от перегрузок. Так, например выполнение критериев «110% активной мощности», «длительное установление максимального расхода топлива» и «температура выхлопных газов» может быть обусловлено одной и той же причиной — перегрузкой агрегата, в то время как появление одной из этих предельных величин без других указывает на наличие неполадки.
После обработки поступивших сигналов должны быть предприняты конкретные действия, направленные на их реализацию. Это заключается, во-первых, в выборе способа выдачи информации (выбор канала) и, во-вторых, в градации и координации выдаваемых команд. Тем самым устанавливается согласованная со степенью возникшей опасности последовательность операций с учетом определенных технологических условий, которые должны при этом выдерживаться.
в) Использование информации. Обработанная информация должна служить прежде всего для сообщения оператору соответствующей о степени опасности. На отдельных пультах генераторов, на главном распределительном щите или на посту управления машинного отделения предусматриваются соответствующие устройства для сигнализации о неполадках, как например световые табло, сигнальные лампы или светящиеся мнемонические схемы, которые в большинстве случаев сочетаются с устройствами звуковой сигнализации.
Современные системы автоматизации обеспечивают дополнительно возможность регистрации неполадки для последующего анализа аварийных состояний. Для этой цели в системе централизованных главных двигателей предусматривается общее печатающее устройство. В некоторых случаях весь контроль за неполадками в системе энергоснабжения осуществляется вместе с контролем других механических установок (пропульсивной, парогенераторной, рефрижераторной и т. д.) центральным устройством обработки информации, что является, однако, менее наглядным.
Так как автоматика судовой сети может устранять неполадки, нет необходимости вырабатывать специальные команды. К непосредственному воздействию системы контроля агрегатов в рамках программы функциональных групп относится отключение генератора, а также запуск и остановка дизеля. Кроме того, программа функциональных групп может выдавать команды на подключение дополнительного агрегата или на отключение второстепенных потребителей, которые проходят, однако, через программу управления процессом.
Общее представление о структуре программы контроля с автоматической ликвидацией неполадок дает простой пример, показанный на рис. 10. Указанные узловые точки следует при этом понимать как смесители (схемы ИЛИ). Принципиальные схемы последних не приводятся. Воспроизведенную часть программы можно в принципе рассматривать как элемент изображенной на рис. 2 общей программы автоматики судовой сети.
Вспомогательные программы. К автоматической- эксплуатации судовой сети относятся также некоторые части программ, которые имеют общее значение для системы в целом и поэтому их реализацию целесообразно производить централизовано. Например, к ним относятся:
а) Программа постоянной готовности к запуску. Для того чтобы резервные агрегаты можно было в любое время вводить в действие, в том числе в аварийных случаях посредством быстрого запуска, необходимо обеспечить постоянное поддержание их в состоянии готовности к работе. Для этой цели служат электрические или паровые подогревательные устройства (грелки), которые регулируются с помощью термостатов. Кроме того, путем периодического подключения и обусловленного результатами контроля отключения независимых (внешних) масляных насосов, должно быть обеспечено постоянное наличие масляной пленки в подшипниках машин.
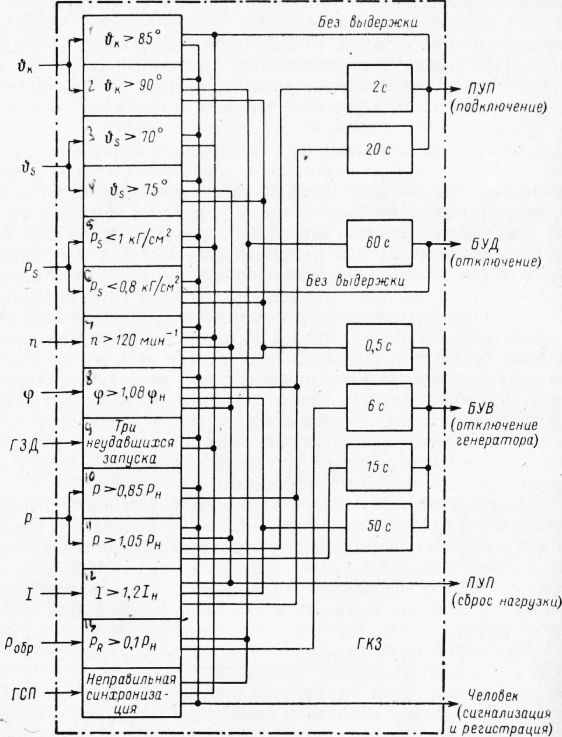
Рис. 10. Детализированная структура программы функциональной группы «контроль и защита» (ГКЗ).
б) Программа испытаний. Целесообразно также контролировать состояние автоматики посредством специальной программы испытаний. В принципе этот вопрос уже рассмотрен.