Ниже рассматриваются вопросы автоматического управления курсом. Проблемы, связанные с поддержанием определенной скорости хода судна будут рассмотрены в разделе, посвященном автоматизации энергетической установки.
Задачи автоматизации. Автоматическое управление курсом морских судов является составной частью автоматической системы судовождения. На нее возлагается задача приведения действительного курсового угла судна (фактического курса) без вмешательства человека в соответствие с заданным курсом (задающим параметром) и поддержание этого состояния в условиях влияния возмущающих воздействий (ветер, волнение моря и т. д.). Корректирующие воздействия при отклонениях курса можно оказывать на положение руля (управляющее воздействие), в результате чего вызывается вращательное движение судна вокруг его вертикальной оси.
К системе автоматического управления курсом предъявляются следующие основные требования:
— точное поддержание курса при всех атмосферных условиях (при возмущающих воздействиях);
— при изменениях курса судна переходный процесс в системе стабилизации должен быть без колебаний (при задающем воздействии);
— приспосабливаемость системы к большему классу характеристик судна, типов рулевых машин, а также различных состояний загрузки судна;
— малые отклонения руля и малая частота необходимых воздействий (2—3 в минуту);
— малые отклонения от заданного курса;
— возможность ручного управления с помощью обычных элементов обслуживания;
— простота и наглядность конструкции и удобство обслуживания;
— простота ухода и ремонта в судовых условиях.
Для выполнения этих требований может быть создан контур управления, который в соответствии с принятой в теории управления терминологией можно в принципе разделить на устройства (авторулевой, рулевая машина и дополнительные устройства) и объект управления (судно в воде).
Прежде чем приступить к более подробному рассмотрению контура управления курса следует тщательно исследовать сам объект управления — судно.
Аналитическое описание движения судна. С точки зрения кинематики рассматриваемое в самом общем виде движение твердого тела (совокупность материальных точек) всегда может быть сведено к поступательному перемещению и вращению его вокруг произвольно выбранной точки. Если в качестве такой точки выбрать центр масс, то движение твердого тела может характеризоваться только движением его центра масс.
Если применить этот метод к судну, то движение последнего можно описать перемещением его центра масс вдоль траектории. Это движение может быть разложено на поступательное движение и вращение вокруг мгновенного положения центра массы.
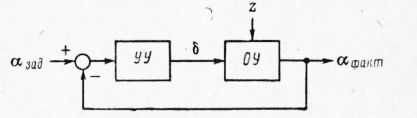
Рис. 1. Общая блок-схема.
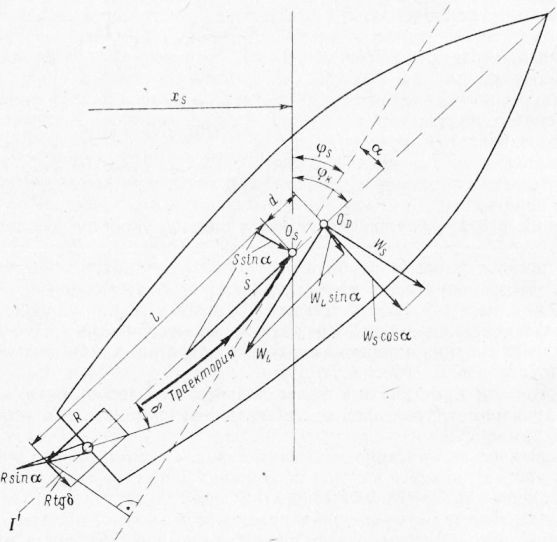
Рис. 2. Геометрические величины и статические силы при движении судна.
1 — 1“ — продольная ось судна (ось бортовой качки); 11 — 11“ — касательная к траектории; Os — центр массы; Ор — точка приложения сил сопротивления; О^Од = rf — длина плеча сил сопротивления; I — длина плеча силы руля; S —сила упора; WL — составляющая силы сопротивления по направлению движения; — составляющая сила сопротивления, перпендикулярная к направлению движения; R — сила руля.
Вывод основных уравнении динамики судна.
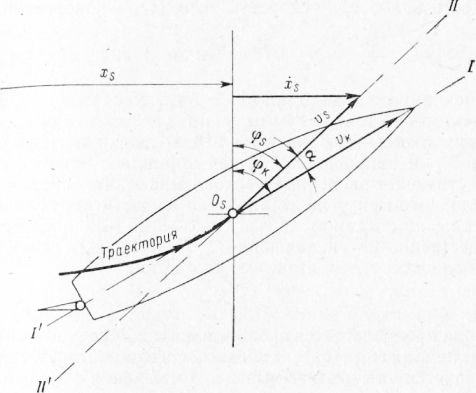
Рис. 3. Геометрические величины и скорости судна.
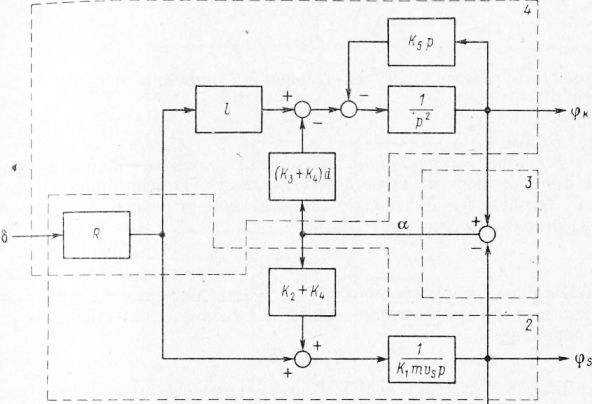
Рис. 4. Диаграмма потока сигналов объекта регулирования курсового угла.
Если мы ограничимся исследованием влияния скорости, то получится уточненный граф прохождения сигналов, представленный на рис. 4.11. Как видно, скорость движения по траектории оказывает параметрическое влияние на вид передаточных функций. Так как скорость хода является составляющей скорости движения по траектории и, с другой стороны, она—управляемая величина контура управления скоростью, то оба контура оказываются связанными друг с другом.
В результате анализа можно констатировать, что объект стабилизации — судно является сравнительно сложным, нелинейным объектом с переменными во времени параметрами.
Количественное определение параметров. После структурного анализа передаточных соотношений судна должна быть решена проблема количественного определения параметров системы. Уже при выводе уравнений движения мы встретились с рядом сил, коэффициентов и других величин, которые часто лишь с большим трудом поддаются расчету. По этой причине в настоящее время невозможно обойтись без применения экспериментальных методов.
Уже в течение некоторого времени в судостроении ведутся исследования, целью которых является определение количественных соотношений между параметрами судна как элемента системы, и такими специфическими характеристиками его, как размеры, масса, осачка и т. д., в результате чего был сделан значительный шаг в направлении расчета параметров судна как объекта управления.
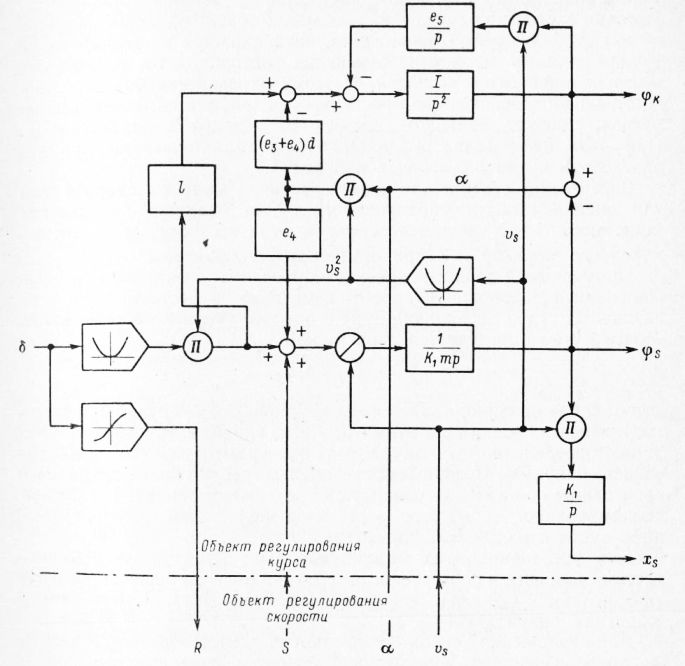
Рис. 5. Уточненная диаграмма потока сигналов объекта регулирования курса.
Второй возможный путь идентификации заключается в применении к судну метода «черного ящика» («black box») и определении связей между причиной и действием чисто экспериментальным путем. При этом исследования могут проводиться либо на реальном судне (full scale tests — натурные испытания), для чего оно уже должно быть построено, либо на подходящих моделях судов (model tests — модельные испытания). В последнем случае результаты
должны с помощью уравнений теории подобия пересчитываться на натурное судно. Преимущество этого метода заключается в том, что результаты измерений могут быть получены на весьма ранней стадии исследования, так что при необходимости можно сравнительно легко вносить поправки.
Однако применение экспериментальных методов для идентификации системы в случае таких сложных объектов, каким является объект стабилизации — курс судна, наталкивается на значительные трудности ввиду множества влияющих факторов, а также имеющих место нелинейностей и связей. Поэтому определение модели, справедливой в пределах всего пространства вариаций сигналов и параметров, требует большого количества отдельных исследований. При этом статические и динамические характеристики принято определять путем раздельных измерений.
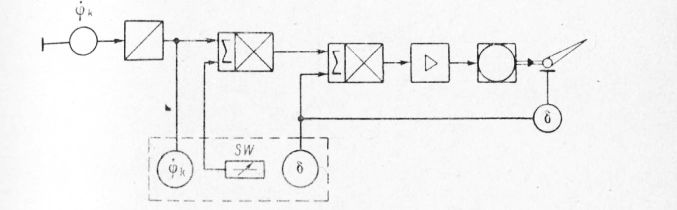
Рис. 6. Диаграмма потока сигналов автоматического устройства регулирования скорости изменения курсового угла.
К существенным преимуществам описанного метода с одной стороны относится возможность проведения измерений также и в неустойчивом диапазоне. С другой стороны, вследствие активного воздействия поворотов руля во время эксперимента, обеспечивается более быстрое восстановление установившегося состояния и, следовательно, сокращение времени измерений.
Для оценки управляемости судна особо важное значение имеет вид кривой в районе начала координат.
Определение динамических характеристик. Для экспериментального определения динамики изменения курсового угла в настоящее время преимущественно применяются тест-сигналы. Сущность таких измерений заключается в том, что изменению угла перекладки руля придается подходящая для этой цели функция времени (тест-сигнал) и соответствующее изменение курсового угла (реакция системы) целесообразным способом фиксируется графически и обрабатывается цифровым методом для определения искомых параметров системы.
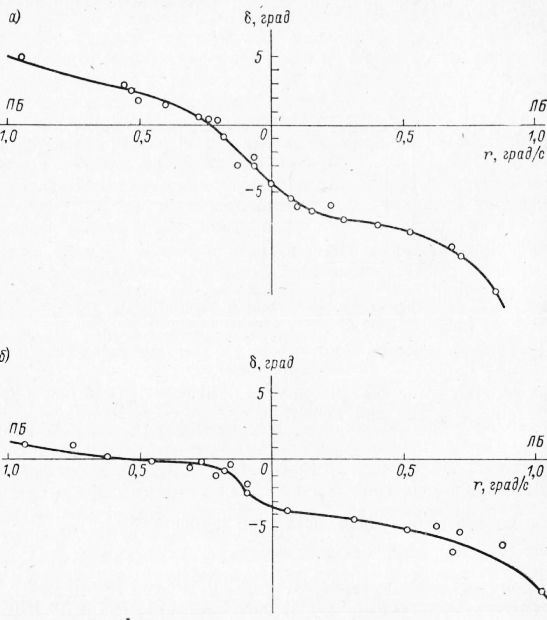
Рис. 7. Пример результатов маневра «обратная спираль»
Среди тест-сигналов наибольшее практическое значение прежде всего имеют ступенчатые, импульсные и синусные функции.
Однако для идентификации таких интегрирующих объектов стабилизации более пригодным представляется импульсный тест, так как при этом исключается интегральное возрастание выходной ветчины и влияние имеющихся нелинейностей оказывается менее существенным.
К наиболее ценным преимуществам методов тестов с апериодическими функциональными сигналами (ступенчатые и импульсные функции) относятся небольшие затраты времени на измерения, отсутствие надобности в особых опытных устройствах, а также сравнительно простая обработка и оценка данных. С другой стороны, измерения очень чувствительны к возмущающим воздействиям и обеспечивают лишь низкую точность оценки полученных данных..
К другой группе методов тестов относятся периодические, в большинстве случаев синусоидально изменяющиеся входные величины и анализируются по величине и фазе колебания ответов, возникающих в установившемся состоянии. Результаты измерений также воспроизводятся в виде кривой геометрических мест или логарифмической амплитудно-частотной диаграммы Боде, которая затем подвергается цифровой обработке.
Так как измерения должны повторяться для достаточно большого числа различных частот, распределенных в представляющем интерес Диапазоне, затраты времени, как правило, велики. С другой стороны, с помощью такого частотного теста достигается значительно более высокая точность, так как каждая из приложенных тестовых частот передается системой с максимальной амплитудой. Другое преимущество заключается в том, что возмущающие помехи могут в значительной мере подавляться во время измерений при относительно небольших дополнительных затратах.
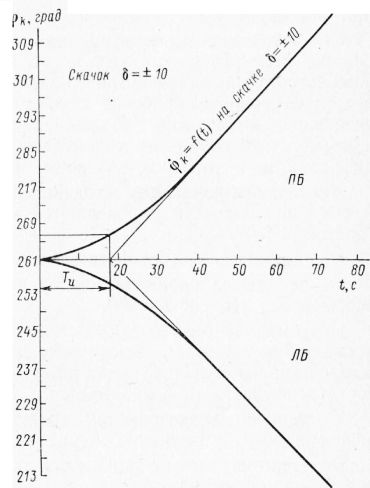
Рис. 8. Измеренная реакция курсового угла на скачкообразное возмущение.
Наконец, экспериментальная идентификация системы может также проводиться с помощью нерегулярных (стохастических) входных сигналов. Для этой цели применяются либо генерируемые искусственно стохастические тестовые сигналы, например так называемый белый шум, либо же для возбуждения системы используются естественные (имманентные) шумовые сигналы, возникающие при нормальной эксплуатации судна.
Стохастическая идентификация системы обеспечивает высокую степень реальности, так как исследования проводятся в близких к эксплуатации или действительных эксплуатационных условиях. С другой стороны, обработка данных таких измерений требует значительно больших затрат по сравнению с названными выше методами и приемлемый результат может быть достигнут только с помощью цифровой вычислительной машины.
Анализ возмущающих воздействий. Движение судна в море и его управляемость определяются в основном следующими факторами:
— динамическими свойствами судна (объекта);
— свойствами влияющих на судно окружающих условий (воз-мущающими воздействиями).
Поэтому для разработки системы управления, приспособленной к реальным условиям, необходимо, чтобы анализ объекта сопровождался анализом действующих на него возмущений, что на практике достаточно часто не выполняется.
К главным возмущающим воздействиям на судно относятся действия ветра и волнение моря.
Воздействие ветра в зависимости от силы и направления приводит к боковому смещению судна, сопровождаемому при определенных условиях вращением вокруг вертикальной оси вследствие асимметрии надводного профиля судна. Однако это возмущающее воздействие для стабилизации курса как правило является динамически некритическим.
В противоположность этому значительно большее значение имеет волнение моря.
Реальное морское волнение, воспроизведенное на рис. 9 в виде отрезка осциллограммы, имеет нерегулярный характер. Для его аналитического описания проводились весьма тщательные исследования (см., например, в двух основных направлениях.
а) Гармонический анализ. Классическая теория волн исходит из предпосылки, что волновое движение может быть разложено в ряд периодических функций. Для этой цели измеренную последовательность волн в пределах принятого для оценки интервала времени At — — t0 необходимо проанализировать с точки зрения ее спектральных составляющих. Затем свободное движение гравита
Эта функция содержит только три параметра, так что качество аппроксимации, как правило, весьма невысокое.
Традиционные методы стабилизации курса. Принципиальная структура системы автоматической стабилизации курса поясняется блок-схемой, приведенной на рис. 10.
Входными величинами стабилизатора курса являются величины действительного курса адег,Ст, поступающие от компасной установки, и заданного с помощью датчика или переданного из курсового вычислительного устройства курса азад. При определении заданного курса следует учитывать поправку компаса. Отклонение курсового угла «депст —аз1Д в системе преобразуется в заданный угол перекладки руля бЗЙД. Отклонение (рассогласование) стабилизируемой величины, как правило, дополнительно контролируется для удержания определенных предельных значений.
Параллельно с системой автоматической стабилизации курса имеется еще второй независимый путь воздействия 2. Тем самым обеспечивается возможность наряду с автоматической стабилизацией осуществлять в любое время ручное управление с помощью ручного штурвала. Кроме того, таким путем при необходимости можно компенсировать остаточные отклонения курсового угла судна.
Преобразование заданного угла перекладки руля в соответствующий угол поворота руля 8действ происходит во вторичном исполнительном (следящем) контуре управления. Из соображений надежности этот контур, как правило, дублируется. С помощью переключателя можно включить в действие тот или иной контур.
Для отклонения руля на его баллере необходимо развить значительные моменты. В большинстве случаев они создаются электрогидравлическими рулевыми машинами. Иногда применяются также и чисто электрические приводы. Управление рулевыми машинами производится с помощью соответствующих усилителей мощности. Кроме того, при перемене вспомогательной энергии необходимы преобразователи энергии (например, для преобразования электрической энергии в гидравлическую). Следящий контур замыкается обратной связью по положению руля 8дейСт. Вместо применявшейся прежде механической или гидравлической обратной связи по положению руля в настоящее время широко внедряется электрическая обратная связь, в которой применяется так называемый гирорулевой. Часто с помощью тахогенератора также измеряется скорость перекладки руля, и соответствующий ей сигнал дополнительно подается на вход системы для улучшения динамики следящего контура Управления.
Приведенная структура контура стабилизации, курса имеет то преимущество, что действующие на руль возмущающие силы (влияние моря) могут быть компенсированы еще в следящем контуре Управления и их влияние на курс судна исключается.
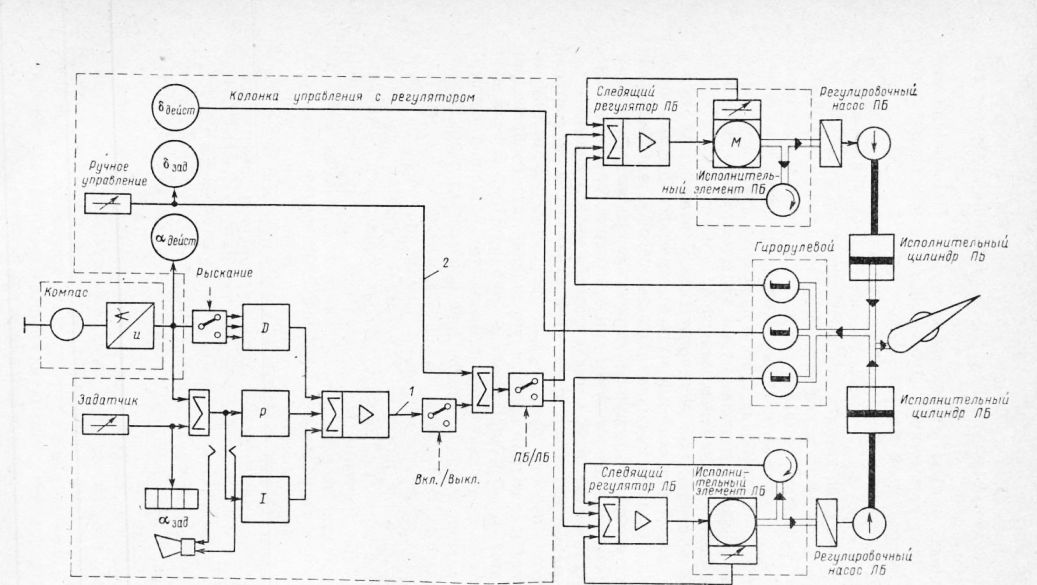
Рис. 9. Блок-схемы автоматической системы регулирования положения руля и стабилизации курса (Народное предприятие «Funkwerk Kopenick», Берлин, ГДР).
Путь прохождения сигналов: 1 – при автоматической стабилизации курса; 2 – при ручном управлении.
Для качества стабилизации курса решающее значение имеет правильный выбор типа системы.
Первые технические решения автоматической стабилизации курса помощью электрической аппаратуры базировались на применении простой в реализации трехпозиционной системы (картушка компаса с переключающими контактами). Путем жесткой обратной связи по углу перекладки руля достигалась характеристика, близкая к характеристике пропорционального управления (П-управление). Однако опыт показал, что этим путем во многих случаях не удается [обиться достаточно устойчивого состояния. Поэтому было предложено выполнять обратную связь с люфтом. Благодаря этому повышался стабилизирующий эффект, причем в противоположность последовательному включению люфтов это не сопровождалось снижением чувствительности системы.
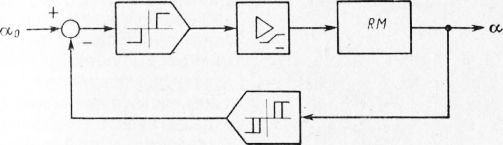
Рис. 10. Блок-схема системы дискретной стабилизации курса с нелинейной обратной связью
Однако на крупных судах в настоящее время всеобщее применение получила непрерывная система стабилизации курса. Для достижения требуемого качества в системе кроме отклонения курсового угла как правило вводится сигнал по первой производной (скорости изменения курсового угла). В особых случаях вводится также сигнал и по второй производной (ускорение изменения курсового угла). Однако составляющая ускорения вызывает на рыскливом судне необходимость частой перекладки руля и противоречит, таким образом, требованию о минимальной работе рулевого устройства и о минимальных потерях скорости хода судна.
Для предотвращения остаточных рассогласований, которые приводят к смещению курса судна, целесообразно также вводить интеграл от рассогласования. Таким образом, очевидно, что ПД- или ПИД-системы обладают благоприятными свойствами для целей стабилизации курса.
Для того чтобы при сильном волнении моря предотвратить чрезмерную работу руля в различных системах стабилизации курса, предусматривают кроме того возможность введения в схему передачи сигналов так называемого люфта по рысканию. Однако в этих случаях сокращение действия рулевого устройства сопровождается понижением точности стабилизации.
Для приспособления систем к действию в переменных окружающих условиях (изменение интенсивности и распределения возмущающих воздействий при сильном волнении моря) или при различных состояниях загрузки судна (изменение его характеристики) в большинстве случаев предусматривается также возможность внешнего изменения параметров или даже структуры системы стабилизации курса. В настоящее время это приспособление в большинстве случаев осуществляется еще вручную, но в принципе оно может осуществляться также и с помощью счетно-решающего устройства управления по курсу, если имеется возможность изменять посредством сигналов параметры системы.
Представление о техническом исполнении современных автоматических установок стабилизации курса дают приведенные здесь изображения двух систем подобного типа. На рис. 11 показана колонка ручного и автоматического управления, изготовленная предприятием VEB Funkwerk Kopenick (ГДР). В нее входит гирокомпасная установка, так называемая колонка ручного и автоматического управления, а также соответствующие ей конструктивные узлы, магнитные усилители, исполнительные элементы с двигателями для воздействия на управляющие клапаны регулировочного насоса рулевой машины, а также гирорулевой.
Широкое распространение получил также так называемый Decca-Arkas-Autopilot (The Decca Navigator Company Ltd., Англия), панель управления которого изображена на рис. 12. Изготовитель указывает, что благодаря применению системы может быть достигнуто повышение скорости судна на 0,5 узла и сокращение фактического пути движения судна на 3%.
Адаптивная стабилизация курса. Выше уже было установлено, что передаточные свойства объекта стабилизации судна подвержены относительно сильным колебаниям. Поэтому от описанного выше классического устройства стабилизации курса удовлетворительных результатов можно ожидать только в рабочем диапазоне, на который настроена система.

Рис. 11. Внешний вид колонки управления установки автоматического регулирования положения руля и стабилизации курса (Народное предприятие «Funkwerk Kopenick», Берлин, ГДР).
Для поддержания приблизительно неизменного качества стабилизации в пределах всего возможного диапазона изменений параметров объекта необходимо, чтобы соответствующим образом изменялся также и алгоритм системы. Систему с таким принципом действия называют самонастраивающейся или адаптивной. В данном случае ее задача заключается в автоматическом приспособлении устанавливающихся параметров и/или структуры системы к меняющимся передаточным свойствам объекта, так что будет сохраняться заданное состояние (поведение) контура управления 1. В большинстве случаев достаточно ограничиться настройкой одного или двух параметров системы (П-составляющая и при необходимости И составляющая).
Главная задача самонастраивающейся системы заключается втом, чтобы сперва распознать изменения состояния объекта или системы (проблема идентификации), а затем произвести необходимые в связи с этим изменения параметров системы (проблема управления).
а) Адаптивное управление. Если , можно вывести однозначную зависимость между входной величиной системы (возмущающим воздействием) и изменением состояния объекта управления, то может применяться метод адаптивного управления.
Рис. 12. Внешний вид авторулевого «Arkas» (фирма «The Decca Navigator CompanyLtd». Лондон).
Соответствующий граф сигналов такого адаптивного управления контуром стабилизации курса представлен на рис. 4.20. Так как измерительное устройство для определения скорости хода уже имеется на судне для других целей, для реализации этой схемы потребуются лишь небольшие дополнительные затраты.
При адаптивном управлении достигаемое качество управления не измеряется. Поэтому цепочка взаимодействия в части определе-
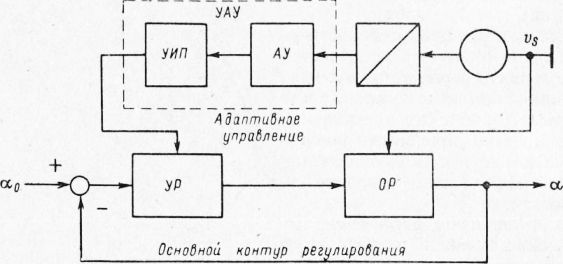
Рис. 13. Блок-схема автоматической системы стабилизации курса с дополнительным адаптивным управлением.
УАУ — устройство адаптивного управления; УИП — устройство изменения параметров; АУ— арифметическое устройство; УР — устройство регулирования (основной контур регулирования); ОР — объем регулирования.
ния качества стабилизации оказывается разомкнутой. В этой системе, как и у всех других систем управления, не возникает проблем устойчивости. Адаптивное управление только корректирует воздействия, воспринимаемые измерительным устройством.
б) Адаптивная стабилизация. Для предотвращения указанного недостатка могут быть созданы адаптивные контуры стабилизации. В этом случае основной контур стабилизации дополняется адаптивным контуром, с помощью которого улучшаются параметры стабилизации на основании прямой или косвенной оценки качества стабилизации основного контура. Таким образом цепочка взаимодействия замкнута по качеству стабилизации.
Существенная предпосылка для принципа действия адаптивной стабилизации заключается в том, что параметры по сравнению с основными постоянными времени дополнительного контура стабилизации изменяются сравнительно медленно.
В адаптивных системах стабилизации с дополнительным тест-сигналом используются прежде всего ступенчатые или синусоидальные сигналы, а также белый (широкополосный) шум. Измерение упрощается, если можно предположить, что регулируемые параметры к началу процесса адаптации уже близки к требуемому значению. В этом случае достаточно произвести только определение отклонения. Так, например, при синусном тесте не надо регистрировать всю частотную характеристику (весь ход изменения частоты), а достаточно произвести по одному измерению для каждого параметра. Благодаря этому сокращаются затраты времени на измерения и объем необходимой аппаратуры. С другой стороны, основная система все время испытывает помехи вследствие воздействия тест-сигналов. Для устранения этих помех целесообразно работать с опорной (эталонной) моделью.
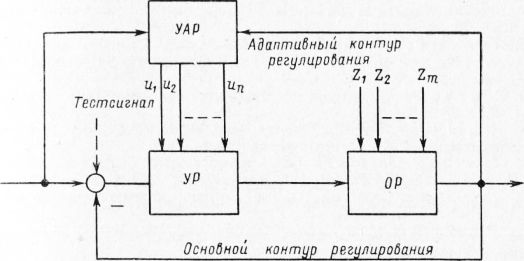
Рис. 14. Блок-схема автоматической системы стабилизации курса с дополнительным адаптивным регулированием.
При адаптивной стабилизации второго вида дополнительные тест-сигналы не применяются. Эти системы базируются на статистической оценке их собственных сигналов, причем здесь необходимо вычисление корреляционных функций. В соответствии с этим потребность в аппаратуре здесь выше, чем при других методах.
Адаптивные системы стабилизации курса применяются пока что только на самолетах и летательных аппаратах с высокими скоростями (ракетах). При условии существенного повышения надежности систем и одновременного снижения стоимости аппаратуры, что можно ожидать в результате внедрения техники интегральных схем, в будущем откроются реальные возможности для применения адсптивной стабилизации курса также и на судах.