Автоматический сбор информации имеет важное зна чение как для оценки ее человеком, так и для обработки в технических устройствах (вычислительных машинах, регуляторах и т. д.)
Практика показывает, что при передаче предназначенной для человека информации, с точки зрения применяемых технических средств, часто бывает трудно разделить процессы получения, обработки и представления информации. Поэтому в этих случаях целесообразно комплексное рассмотрение вопроса.
Классификация информации. Исходя из целей судовождения, требуемую информацию можно разделить на следующие группы:
— параметры движения самого судна (местонахождение, курсовой угол, скорость хода);
— параметры движения других объектов (местонахождение, направление движения, при необходимости скорость);
— географические условия (распределение суши и воды, профиль морского дна и т. д.);
— гидрологические условия (поле течений, ,температура воды, волнение моря и т. д.);
— метеорологические условия (давление и температура воздуха, поле ветровых потоков и т. д.);
— прочие правила и рекомендации (правила судоходства, обязательные пути движения судов и т. д.).
С точки зрения автоматизации обработки информации представляется целесообразной следующая классификация информации.
1. Физические величины, как, например, курсовой угол, глубина воды и пр., содержащие информацию о протекающих во времени процессах. Информацию этого рода в принципе можно получать путем постоянных измерений и поэтому ее называют информацией по данным измерений. Ее получают либо путем непосредственных измерений на самом судне или в его ближайшем окружении, либо путем телеизмерений и дистанционной передачи на судно из других мест (с помощью радиосвязи).
2. Другая группа необходимой информации имеет в значительной мере инвариантный во времени характер. Эта информация представляется в виде конкретных данных. Сюда прежде всего относится
Ьормация о географических условиях. Однако распределение морских течений или другие географические условия, макроскопическая птхация в некоторых районах также могут на известные периоды племени рассматриваться как квазистационарные. Для определения этого рода информации необходимо большое количество отдельных измерений. В течение периода стационарности географических условий информация определяется на основе единого комплексного процесса измерений и накапливается в соответствующем виде для дальнейшего использования. Наиболее целесообразной формой хранения и представления этой информации с точки зрения удобства использования ее человеком все еще.остаются карты и справочники.
При автоматической оценке этих данных возникают большие трудности, вытекающие из необходимости накопления большого количества этой информации в пригодной для вычислительной машины форме. В этом направлении до сих пор еще нет экономически приемлемых решений.
3. Наконец, можно выделить третью группу информации, носящую характер инструкций. Сюда относятся команды, инструкции, правила, положения и т. д. Использование такой информации не представляет особых проблем также и при применении вычислительных машин.
Измерение курсового угла. Автономное определение северного направления, а вместе с тем и условного азимута имеет важнейшее значение для навигации. Для этой цели издавна применяются соответствующие измерительные устройства в виде компасных установок.
В дальнейшем мы ограничимся в основном проблемами, возникающими в связи с применением компасных установок в системах автоматизации и будем при этом учитывать прежде всего новые разработки.
В связи с автоматизацией к компасным установкам предъявляются следующие требования:
— высокая статическая и динамическая точность показания направлений;
— максимальное подавление систематических гироскопических погрешностей;
— автоматическое исключение влияния движений судна (бортовой и килевой качки, хода судна);
— преобразование измеренной величины и дистанционный сигнал;
— обеспечение высокой надежности и долговечности;
— малые затраты на обслуживание и уход.
Для указанных выше целей предназначены следующие виды компасов.
а) Магнитный компас. К первым из применявшихся когда-либо на морских судах измерительным устройствам относится магнитный компас. Принцип его действия основан на определении направления потоков земного магнетизма и является достаточно известным.
Магнитный компас применяется также и в сочетании с системой автоматического управления курсом. Для дистанционной передачи Данных измерений он оборудуется устройством для съема показаний, имеющим малую реакцию и работающим в большинстве случаев на индуктивной основе.
При применении магнитного компаса следует учитывать, что для получения истинного курса к измеренному курсу судна следует прибавлять алгебраическую сумму магнитного склонения и девиации.
б) Гирокомпас. Гирокомпас является в настоящее время наиболее распространенным типом компасов на транспортных судах. Он относится к группе ротационных компасов.
Принцип действия ротационных компасов основан на явлении суточного вращения Земли.
Принцип действия ротационных компасов может быть сведен, в основном, к измерению частоты вращения. С этой целью образуют исполнительный сигнал, который в ходе процесса компенсации перемещает главную ось компаса до тех пор, пока не будет достигнуто совпадение с направлением на север (система поиска севера). Это положение затем сохраняется независимо от влияния вращения Земли. Реализация процесса компенсации представляет особые трудности в нестационарных условиях работы судового компаса.
В гирокомпасах для определения земного вращения применены гироскопы, ввиду их способности сохранять неизменным положение своей оси вращения (фигуры) в абсолютном пространстве, если этому не препятствуют моменты внешних сил. Для того чтобы предотвратить влияние внешних сил на гироскоп, он должен быть подвешен абсолютно свободно. Для этой цели предпочтение отдают так называемой плавающей опоре, а не карданному подвесу.
Для возможности применения гирокомпаса в нестационарных условиях необходимо создание искусственного горизонта, который, в особенности в меридианальном направлении, почти безошибочно воспроизводил бы истинный горизонт.
Любая система, обеспечивающая выполнение этого требования, содержит в себе в принципе комбинацию индикатора (датчика) вертикали и гироскопа. Если привязка к горизонту осуществляется без долнительных вспомогательных средств, — только за счет соответствующей механической конструкции гироскопической системы, — то говорят о собственном слежении. Другую возможность создания искусственного горизонта обеспечивает независимое слежение за гироскопами, для чего применяется отдельная следящая система, содержащая усилитель сигналов.
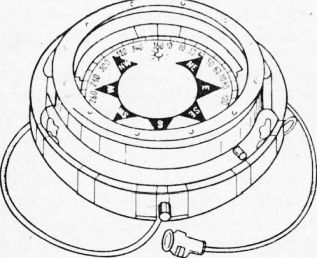
Рис. 1. Магнитный компас с индуктивным съемом показаний (фирма «The Decca Navigator, Ltd», Лондон).
Гироскопические системы с независимым слежением имеют несколько более высокую точность. Однако, как правило, их применяют только на быстроходных военных кораблях. На транспортных судах преобладают системы с собственным слежением. В системах этого типа используется маятниковое устройство (по принципу Шулера— Аншютца или Сперри). В гироскопической системе с маятниковым устройством при возникающих ускорениях (вызванных изменениями скорости и курса, качкой судна) на гироскоп передаются моменты, обусловливающие прецессию его оси. Для максимального возможного исключения таких влияний применяют многогироскопные устройства.
При использовании гирокомпасов следует также учитывать различные факторы, вызывающие погрешности вследствие неполного выполнения поставленных выше требований. Наиболее существенными погрешностями показаний являются инерционные, а также погрешности, вызванные качкой судна. Первые из них удалось снизить путем соответствующего выбора длины маятника (Т = = 84,4 мин по Шулеру). Полное устранение влияния качки в настояг щее время не достигнуто.
Представление о конструкции применяемых в настоящее время гирокомпасов дает рис. 2.
Двухгироскопная система со смещенными центрами тяжести находится внутри заполненной водородом гироскопической сферы. Последняя погружена в электропроводящую жидкость, заполняющую кожух компаса, причем ее центрирование обеспечивается с помощью так называемых катушек «дутья». Ток к приводам гироскопов подводится посредством контактных колец на сферическую оболочку, а с нее через полюсные шапки на гироскопическую сферу.
Передача значений курсового угла с гироскопической сферы осуществляется следящей системой. При этом измерительный мост для определения действительного положения образуется жидкостными сопротивлениями, включенными в мостовую схему.
В течение последних 15 лет гирокомпас значительно усовершенствовался, что, в частности, привело к существенному уменьшению его размеров и относительному снижению стоимости.
«) Лазерный гироскоп. Развитие лазерной техники за последние годы открыло новые возможности для конструирования ротационных компасов. Ядро таких компасов образует кольцевой лазер. Принцип действия основан на измерении малых угловых скоростей. До сих пор можно было надежно измерять угловую скорость до одного радусав час. В качестве теоретического предела измерений с использованием этого метода указывают величины до 1-3 град/ч
г) Электронный компас. Новейшие разработки направлены на создание чисто электронного компаса. Принцип его действия основан на использовании в качестве измеряемого параметра отклонения электронного луча магнитным полем Земли.
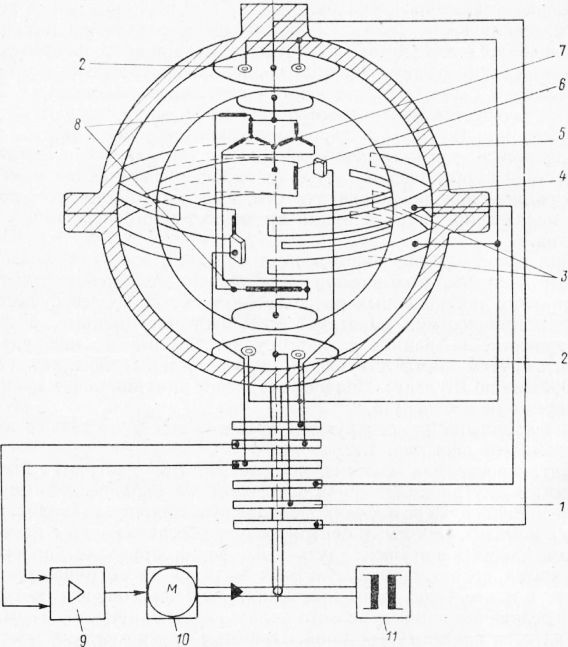
Рис. 2. Принципиальная схема гирокомпасной установки (предприятие «Funkwerk Kopenick», Берлин, ГДР).
1 — контактные кольца для подвода трехфазного тока; 2 — полюсы; 3 — экваториальные кольца; 4 — котелок компаса (сферическая оболочка); 5 — гиросфера; 6 — электроды управления; 7 — азимут-моторы; 8 — «катушки дутья»; 9 — усилитель; 10 — исполнительный механизм: 11 „— индуктивный датчик.
Измерение скорости судна. Измерение скорости судна в почти безориентирном окружающем пространстве открытого моря до сих пор представляет собой сложную проблему. Основная трудность заключается здесь в том, что вместо нужной навигатору «скорости относительно грунта» в большинстве случаев можно определить только «скорость по воде», причем между результатами этих двух способов измерений, ввиду сильных возмущающих воздействий, могут иметь
0 значительные различия. Основными возмущающими воздей-М виями является снос судна морскими течениями, дрейф по ветру, Сействие обтекающих судно потоков воды и влияние попутного потока, создаваемого гребным винтом.
Трудности измерения скорости судна обусловили появление множества различных методов, разработанных для решения этой проблемы.
При измерении скорости судна необходимо обеспечить:
— определение скорости на заданном курсе;
— погрешность не более 5%;
— линейность характеристики измерителя;
— дистанционную передачу предпочтительно непрерывных сигналов; при дискретных методах измерения — выполнение теоремы отсчетов;
— векторное определение скорости;
— применимость при всех возникающих условиях эксплуатации (атмосферные условия, глубина воды, химический состав морской воды и т. д.);
— приемлемые технические затраты (стоимость измерений);
— надежность;
— малую потребность в уходе.
С точки зрения перечисленных требований среди известных в настоящее время принципов измерения скорости судна наибольший интерес вызывают гидромеханические и электрические методы.
а) Гидромеханический лаг. В настоящее время наиболее широкое применение на судах находят устройства, использующие гидромеханические принципы измерения скорости. Наиболее известными из них являются вертушечный лаг (измеряемая величина — время) и гидростатический лаг (измеряемая величина—давление), который применяется в основном в двух исполнениях. Так называемый ште-вень-лаг измеряет гидродинамическое давление потока у носа судна, днищевой лаг измеряет давление с помощью выдвигаемого из днища“ судна гидростатического зонда.
Для того чтобы исключить из результата измерения влияние осадки, имеющей разную величину в зависимости от загрузки судна, гидростатическое давление измеряется отдельно и вычитается из общего давления. Для этой цели предпочтительно применять механические средства.
Принцип действия таких измерительных устройств основан на методе компенсации сил. Нагрузка пружины осуществляется с помощью следящей системы. Путем интегрирования скорости судна опредёляется пройденное им расстояние.
б) Электрический лаг. Новейшие разработки направлены на создание электродинамического лага. Его принцип действия основан на открытом Фарадеем законе индукции.
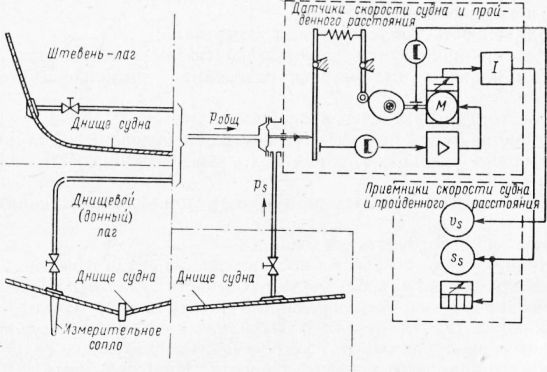
Рис. 3. Принципиальная схема гидростатического лага (Предприятие «Funkwerk . Kopenick», Берлин, ГДР).
В электродинамическом лаге подвижным проводником является протекающая вода. Необходимый для этого метода электромагнит, а также электроды для снятия индуцированной э. д. с. помещены в зонде. Гидродинамическим требованиям лучше всего отвечает зонд с обтекаемым профилем. При малых скоростях может применяться зонд стержневой формы.
Вследствие зависимости наводимой э. д. с. от направления обтекания метод электродинамического измерения потока может быть применен для измерения компонентов потока (его величины и направления).
Приведенные выше требования могут, как правило, гораздо лучше выполняться электронным методом. Наряду с усовершенствованием электродинамического лага в настоящее время прово-
исследования других методов измерения скорости судна на ДЯК)ве магнитного (искажения поля под действием вихревых токов), <К, шческого (отвод тепла нагревательной проволоки) и релятивист-„ioro (явления Доплера в звуковых волнах) эффектов. Недостатком метода считают сравнительно высокие затраты на электронные устройства.
Определение местонахождения и пройденного расстояния. Определение местонахождения судов представляет собой одну из основных проблем навигации. С современной точки зрения к нему предъявляются следующие требования:
— определение положения в любой точке земного шара;
— малый радиус погрешностей;
— независимость от времени суток, состояния погоды, видимости и облачности;
— быстрота измерений и обработки данных;
— возможность автоматизации;
— по возможности непосредственная выдача координат местонахождения;
— высокая достоверность;
— приемлемая стоимость.
Положение подвижных объектов можно определить двумя основными способами. Один из них базируется на применении известных ориентиров вне судна. Сюда относится визуальная навигация (использование известных береговых ориентиров), астронавигация (наблюдение за небесными телами), а также радионавигация (обработка радиосигналов от передатчиков с известным местонахождением). Ко второй группе относятся методы навигации, при которых определение местонахождения судна производится безотносительно к внешним фиксированным пунктам.
Их называют обычно автономными (по отношению к судну), а иногда и техническими методами навигации. К этим методам относится так называемая навигация (плавание) по составному счислению и инерциальная навигация.
Из названных методов навигации с точки зрения техники автоматизации предпочтительны навигация по составному счислению, инерциальная навигация и радионавигация.
а) Навигация по составному счислению. Распространенная в настоящее время навигация по составному счислению определяет местонахождение судна путем интегрирования его скорости. Для установления направления и величины скорости необходима информация о курсе и ходе судна. Начало интегрирования должно задаваться фиксированной начальной величиной.
Составное счисление до сих пор выполняется навигатором в основном вручную. При этом на основе дискретных измерений определяются параметры прямых, которые затем последовательно наносятся на морские карты. Этот метод может быть в принципе также автоматизирован. Для этой цели информация о курсе и ходе судна может непрерывно вводиться в аналоговую вычислительную машину, которая производит соответствующую обработку данных и выдает результаты на прибор для механического решения навигационных задач и прокладки курса. Благодаря этому исключается возможность субъективных ошибок. Тем не менее этот метод, прежде всего ввиду неточностей измерения скорости судна, остается проблематичным.
б) Инерциальная навигация. Этот метод основан на двойном интегрировании ускорения движения судна. Для исключения влияния-помех (бортовая и килевая качка) датчики ускорения должны устанавливаться на платформах, хорошо стабилизированных посредством гироскопов.
Ввиду высоких технических затрат, а также вследствие обуславливаемых двойным интегрированием ошибок инерциальная навигация, за исключением случаев применения на военных кораблях (прежде всего на подводных лодках), в судоходстве до сих пор рас пространения не получила.
в) Радиопеленгация. Другой способ определения местонахожде ния судна основан на пеленгации радиомаяков или передатчиков с известным местонахождением. Процесс радиопеленгации также может быть относительно просто автоматизирован. Однако, ввиду того, что применение этого метода остается ограниченным районами, сравнительно мало удаленными от берега, автоматический радиопеленгатор также не может дать удовлетворительного системного ре шения.
г) Методы гиперболической навигации. Эти методы основаны на оценке различий фаз или времени прохождения немодулированных низкочастотных сигналов, которые непрерывно передаются несколькими синхронизированными между собой передатчиками с различным местонахождением. Применение их требует значительных технических средств как на берегу (цепочка передатчиков), так и на судне (принимающие и обрабатывающие устройства).
Так называемый метод Decca Navigator может применяться для коротких и средних расстояний. В пределах номинального диапазона дальности действия этой системы порядка 240 миль погрешность определения местонахождения объекта находится в пределах 1 мили в дневное время и 5 миль в ночное время (влияние интерференций) [4.8]. К настоящему времени цепочками передатчиков оборудованы районы плавания вдоль побережья Западной Европы, у восточного побережья Канады, в Персидском заливе и вдоль побережья Индии и Южной Африки. Хотя определение местонахождения по методу Decca в настоящее время еще требует некоторых ручных операций (внесение показаний Decca-приемников в гиперболические карты), полная автоматизация процесса измерений может быть сравнительно легко достигнута.
Другой метод гиперболической навигации обеспечивается системой Loran (Long Range Air Navigation), применяемой прежде всего в районе североамериканского побережья. Дальность действия этой системы, составляющая примерно 500 миль, более чем вдвое превышает дальность действия системы Decca Navigator при приблизительно одинаковой погрешности определения местонахождения объекта (от 1,5 до 5 миль).
Если мы подведем теперь некоторый итог, то можно констатиро-аТь что применяемые до сих пор методы навигации не удовлетво-В’пот ряду приведенных выше весьма существенных требований. Особо следует подчеркнуть, что в настоящее время еще не сущест-ет эффективного и экономически оправданного метода навигации с большой дальностью действия, который позволил бы в любом месте определять местонахождение морских судов с достаточной точностью п учитывал бы требования автоматизации процесса навигации. В ста-чии разработки и опробования находятся некоторые новые методы, которые, как полагают, смогут преодолеть указанные недостатки. Представляется, что наибольшего успеха обещают описываемые ниже методы навигации.
д) Навигация по методу «Omega». Электронной лабораторией военно-морского флора США (US Navy Electronics Laboratory), Исследовательской лабораторией военно-морского флота США (ftavy Research Laboratory) и некоторыми другими организациями был разработан новый метод радионавигации, получивший условное название «Omega», который должен с хорошей точностью обеспечивать определение местонахождения кораблей в мировой (глобальной) акватории. После проведения многолетних опытов на большом пространстве предлагается соорудить восемь соответствующим образом распределенных передаточных станций, благодаря чему поверхность земного шара будет постоянно покрыта сетью разностно-дальномер-ных фазовых линий местоположения. Указывается, что среднеквадратичная погрешность определения местонахождения по этому методу составит 1 км днем и 2 км ночью.
Одинаковые по значимости передатчики синхронизированы между собой и излучают в соответствии с установленным временным графиком в периодической последовательности определенные частоты в диапазоне, начиная с 10 кГц. Продолжительность цикла составляет 10 с. Один цикл состоит из трех отрезков времени, в течение которых последовательно излучаются модулированные по фазе несущие частоты 10,2; 13,6 и 11V3 кГц длительностью 104 периодов (««1 с) каждая, а затем специфическая для данного передатчика несущая частота. Циклы отдельных передатчиков смещены друг относительно друга во времени. Применение несущих частот в 10-кило-герцевом диапазоне обеспечивает оптимальные условия распространения и ограничивает потребную мощность передатчиков (около 10 кВт).
Посредством модуляции передается информация, для распознавания полос, сообщения нормального времени или для синхронизации. Для определения местонахождения судна по методу «Omega» в принципе измеряется несущая частота. При этом целесообразно, чтобы навигатор использовал наиболее благоприятно расположенные станции. Однако он везде сталкивается с ошибками, которые лишь на несколько процентов выходят за оптимум (при перпендикулярно перекрещивающихся линиях положения).
Вследствие периодичности фаз несущих частот имеет место мно-„означность определения местонахождения, так как к каждой измеренной фазе относится почти что прямоугольная сетка возможных угловых точек. Для решения этой проблемы при дискретных измерениях необходимо для сравнения произвести определение местонахождения по какому-либо другому методу. Однако еще лучше использовать присущую методу «Omega» возможность инденти-фикации полос, с помощью которой среди возможных узловых точек определяется верная точка для каждого конкретного случая.
Обработка спектра «Omega» для определения местонахождения может производиться различными способами [4.9]. При невысоких требованиях к точности достаточен обычный приемник с ручным обслуживанием, с помощью которого пеленгуется пара передатчиков. Однако здесь мы будем рассматривать только поддающиеся систематизации формы обработки.
Сравнительно легко могут применяться специальные устройства, которые непрерывно обрабатывают данные спектра «Omega» для опре деления местонахождения и производят соответствующую регистрацию. После того, как будет выбрана наиболее подходящая группа станций, на них можно, как правило, затем ориентироваться даже через тысячи километров.
Для полного использования всех возможностей метода «Omega» потребуется, однако, применение вычислительной машины. Такая машина могла бы в первую очередь взять на себя функцию обработки поступающей информации. В этом случае техническое устройство состояло бы из полосового фильтра-усилителя для соответствующей частоты системы «Omega», вычислительной машины, а также соответствующего выводного устройства. Другая задача вычислительной машины заключалась бы в непосредственном расчете расстояния и времени передачи. Для обеспечения определенного максимума точности вычислительная машина должна также путем прослеживания всех частот системы «Omega» выбирать те из них, которые наиболее благоприятны для обработки и оценки. Наконец, возможности, обеспечиваемые избыточностью этого метода, могут использоваться для контроля результатов.
е) Навигация по космическим спутникам. В настоящее время исследуются различные методы определения положения судов в море с использованием искусственных спутников Земли. Для сравнения этих методов существенное значение имеет различие в способах получения данных измерений и их обработки непосредственно на борту судна (самопеленгация) и определения позиции по запросу с судна средствами, расположенными вне его, причем для сообщения результатов применяется дистанционная передача («чужое пеленгование»). Этим, в первую очередь, обуславливается объем необходимых на судне технических средств.
Определение местонахождения с помощью спутников Земли в большинстве случаев основано на измерении доплеровской. частоты радиосигналов. Этим термином обозначают изменение частоты вследствие4собственной скорости передатчика или приемника.
При обработке измеренных доплеровских частот для определения искомых координат судна приходится производить сравнительно громоздкие расчеты (учет влияния ионосферы, погрешностей по времени, параметров траектории спутника, а также предварительный расчет запоминающих устройств спутника). В соответствии с этим экономические затраты в любом случае являются высокими. С другой стороны, эти методы обладают такими свойствами, которые не могли быть достигнуты ни одним из ранее известных.
Прежде всего известность получила работающая с четырьмя спутниками система «Transit» (самопеленгация), которая испыты-вается с 1959 г. Погрешность определения местонахождения оценивается в зависимости от величины судов до 0,5—1 мили. Считается возможным уменьшение погрешности до 0,1 мили. Уже известны первые случаи применения этой системы в транспортном судоходстве. Считают, что в ближайшие десятилетия навигация по спутникам получит всеобщее применение.
Предупреждение столкновений. а) Радарная техника. Для предотвращения столкновений со стационарными и подвижными препятствиями важное значение имеет радиолокационная техника. Кроме того, вблизи побережья радиолокационные станции (РЛС) могут использоваться для определения местонахождения судов.
Поскольку изображение на экране РЛС обладает большим информационным содержанием, особый интерес представляет частичная или полная автоматизация обработки этой информации. Современные судовые РЛС обеспечивают возможность одновременной регистрации курсов нескольких судов в сочетании с автоматической фиксацией времени.
Следующий шаг в направлении создания эффективной системы «редотвращения столкновений заключается в автоматическом срабатывании предупредительной сигнализации при возникновении опасности столкновения, а также в выдаче судоводителям инструкций Для наиболее целесообразного разрешения таких конфликтных ситуаций. Дальнейшее развитие направлено на автоматическое осуществление маневров расхождения.
б) Гидроакустика. Применение гидроакустики направлено прежде всего на своевременное предупреждение подводных столкновений. Наибольшую известность получил так называемый противомельный сонар (гидролокатор). Он контролирует глубину моря на большом расстоянии (например, 2000 м) по ходу судна и предупреждает о приближении к мелководью, если глубина воды оказывается меньше определенной величины. Кроме того, путем постоянного сравнения действительной глубины воды с номинальной величиной на заданном форватере возможен дополнительный контроль за правильным курсом судна. Ввиду того, что морское дно во многих районах, представляющих интерес для судоходства, имеет характерную структуру, гидроакустические методы при наличии соответствующих карт также могут использоваться для определения местонахождения судов.
в) Телевизицнная техника. Для облегчения маневрирования при подходе и отходе от причалов, в особенности на больших судах, в настоящее время применяются специальные телевизионные установки, которые также могут рассматриваться с точки зрения предупреждения столкновений. Ввиду того что они позволяют обойтись без наблюдателей на палубе и способствуют централизации всей важной для навигации информации на мостике, их также можно причислить к устройствам автоматизации. Телевизионные установки могут применяться на судах также и во всех других случаях, когда важные, связанные с эксплуатацией судна процессы должны контролироваться из центрального поста.
Измерение гидрометеорологических величин. Измерение и регистрация гидрологических и метеорологических окружающих условий судна, характеризуемых атмосферным давлением и температурой воздуха, направлением и скоростью ветра, температурой, скоростью и направлением морских течений и т. п., имеют большое значение для навигации. Поэтому любое-более или менее крупное судно располагает известным количеством соответствующих измерительных устройств, большинство которых имеют, однако, традиционное исполнение.
Оценка гидрометеорологической информации возлагается до сих пор на навигатора, так что степень автоматизации здесь еще очень низка. Оценка информации несколько облегчается применением автоматического синоптического картографа.