Температура воды Мирового океана является существенно переменным параметром как в пространстве, так и во времени. Малые колебания температуры воды отмечаются в поверхностных слоях океана и обычно имеют сезонный характер. Наибольшие изменения температуры воды наблюдаются по глубине океана и зависят от широты района. Максимальные пространственные вертикальные градиенты температуры существуют в экваториальных и тропических широтах, преимущественно в районе термоклина. Там же наблюдается наибольшая разница между температурой воды поверхностного и придонного слоев.
Нижняя граница температурного диапазона присуща температуре воды поверхностного слоя в верхних широтах. В период образования льда за счет осолонения поверхностных вод температура их в этих районах может понижаться до —1,8—1,9 °С. Поэтому обычно нижняя температура принимается равной —2 °С.
Верхняя граница температурного диапазона определяется температурой поверхностных вод тропического района. В открытом океане она не превышает обычно 30 °С. В ряде районов, например в Красном, Карибском море, Персидском заливе, температура поверхностного слоя повышается до 32 °С и более.
Рассмотрим далее частотный диапазон аналоговых сигналов, получаемых при измерении температуры. Он определяется временной и пространственной неоднородностью среды, а также методикой проведения измерений.
Измерения временной изменчивости и пространственных неоднородностей температуры воды могут проводиться как с неподвижных оснований, так и с движущихся буксируемых систем. В первом случае частотные характеристики получаемых сигналов определяются в основном скоростью течения и линейными размерами температурных неоднородностей среды.
Температура воды в океане измеряется различными способами, использующими разнообразные физические принципы и дающими различные точности.
Для измерения температуры в океане используются в основном два метода: метод непосредственного измерения и метод дистанционного измерения.
Метод непосредственного измерения температуры использует ртутные термометры, проволочные и полупроводниковые термометры сопротивления, кварцевые и деформационные термометры.
Для дистанционного измерения температуры поверхности океана используется собственное излучение океана в ИК-диапазоне. Таким способом можно измерять температуру поверхностных вод с идущего судна, с самолета и спутника Земли.
При конструировании аппаратуры для измерения температуры морской воды следует учитывать ряд факторов.
Чувствительный элемент обычно имеет арматуру, которая предохраняет его от воздействия агрессивности морской воды, гидростатического давления и набегающего потока. Чувствительный элемент, как правило, имеет тепловой контакт с массивным корпусом измерительного устройства. Параметры теплообмена чувствительного элемента и среды являются переменными.
Наконец, размеры термоприемника приводят к пространственному искажению поля температуры. Тепловая инерция и ее изменчивость в зависимости от режима обтекания, а также конечные размеры датчика температуры оказываются основными источниками погрешностей при изучении пространственно-временной изменчивости поля. Эти погрешности относятся к погрешностям динамического характера. Наличие теплового контакта между датчиком и массивным корпусом приводит к методическим погрешностям.
Наиболее распространено измерение температуры с помощью глубоководных ртутных термометров. Применяются опрокидывающиеся термометры, которые используются при проведении барометрических серий. Эти термометры являются основным средством для измерения температуры воды на больших глубинах. Следует отметить, что ртутные термометры все еще превосходят остальные средства измерения температуры по точности. Ими обеспечивается точность измерения температуры воды до 0,02 °С.
Для достижения высокой точности измерения температуры в широком диапазоне в приборе устанавливаются несколько термоментов со сдвинутыми температурными шкалами.
У ртутных термометров достаточно большая постоянная времени измерения. Так, глубоководный термометр должен выдерживаться на горизонте измерения 5—7 мин.
Достаточно популярным измерителем температуры долгое время были деформационные термометры. Они применялись обычно в зондирующих батитермографах. Однако они имеют низкую точность, не превышающую 0,1—0,2 °С. В качестве чувствительного элемента в них используется биметаллическая пружина,, которая меняет закручивание от изменения температуры и тем создает соответствующее перемещение одного из своих концов.
Температура воды в океане может быть измерена с помощью проволочных и полупроводниковых термометров сопротивления, а также кварцевых резонаторов. Конструктивно проволочный датчик состоит из бифилярной спирали, намотанной на жестком основании. Спираль помещается в защитный корпус, предохраняющий ее от морской воды. На постоянную времени значительное влияние оказывает конструкция прочного корпуса. Термометры, измеряющие температуру воды на глубинах до 2—3 км, имеют постоянную времени 2—3 с. Иногда за счет специальной конструкции прочного корпуса постоянная времени таких термометров сопротивления может быть снижена до 0,2 с. В качестве прочного корпуса в этом случае использована трубка из золота, имеющая наружный диаметр 0,02 м. Чувствительный элемент редставляет собой тонкую платиновую проволоку, которая поена внутрь трубки. Используемый часто стандартный платиновый термометр типа ТСИ-361 имеет стальной прочный корпус диаметром 2 мм и обеспечивает тепловую инерцию 0,5 с.
Для изготовления термометров сопротивления используется платина или медь. В последнее время начинают использовать также никель и вольфрам.
Пространство между чувствительным элементом и прочным корпусом датчика обычно заполняется трансформаторным или силиконовым маслом или специальной пастой высокой теплопроводности. Такое заполнение улучшает тепловой контакт с окружающей средой.
Проволочные термометры привлекают простотой преобразования измеряемой величины в электрический аналог. Измерительные схемы, преобразующие первичный сигнал с датчика, обеспечивают высокую точность и разрешающую способность при сравнительно простом схемном решении. Наибольшей стабильностью характеристики отличаются платиновые термометры сопротивления. Их температурный коэффициент составляет 0,29 % на 1 °С, нелинейность статической характеристики не превышает 0,55 % в рабочем состоянии температур.
Термометры сопротивления, которые построены на основе медной проволоки, отличаются на порядок менее стабильными характеристиками по сравнению с платиновыми.
Никелевые термометры сопротивления обладают более высокой, чем платиновые и медные, чувствительностью, примерно в полтора раза. Однако затруднения состоят в получении никелевого провода высокой чистоты. В связи с этим никелевые термометры уступают платиновым и медным по долговременной стабильности.
Полупроводниковые термометры оказываются наиболее перспективными датчиками температуры. Их главное достоинство состоит в высоком температурном коэффициенте, достигающем 6— 8 % на 1 °С. Полупроводниковые термисторы имеют малые габариты и стоимость. Однако они отличаются сравнительно большой нелинейностью характеристики и временным дрейфом.
В последнее время появились полупроводниковые термисторы, которые не уступают платиновым термометрам сопротивления.
Датчиками температуры могут быть также термочувствительные кварцевые резонаторы. Они обладают высокой добротностью и стабильностью параметров. В диапазоне температур от —60 до 120 °С абсолютная погрешность измерения составляет 0,02 °С. Относительная нестабильность кварцевого резонатора в течение часа не превышает -10 при времени усреднения выборки 10 с. Разрешающая способность достигает 0,0001 °С. В диапазоне от 0 до 100 °С нелинейность характеристики кварцевого резонатора составляет 0,074 °С. Кварцевые преобразователи температуры, однако, довольно инерционны, а измерительные схемы с кварцевыми резонаторами достаточно сложны. Обычно схема имеет два кварцевых генератора. Один из них — с термочувствительным кварцем, другой — с термостабилизированным кварцем. Напряжения с обоих генераторов поступают на смеситель, с которого снимается разностная частота. Собственная резонансная частота термодатчиков в зависимости от типа датчика находится в пределах от 3 до 30 МГц. Девиация частоты обычно составляет 150—100 Гц на 1 °С.
Очевидно, что кварцевые резонаторы в качестве датчика температуры следует применять, когда требуется достичь высоких точностных характеристик и разрешающей способности. Их целесообразно использовать при исследовании длиннопериодных флюктуации температуры при проведении долговременных автономных наблюдений.
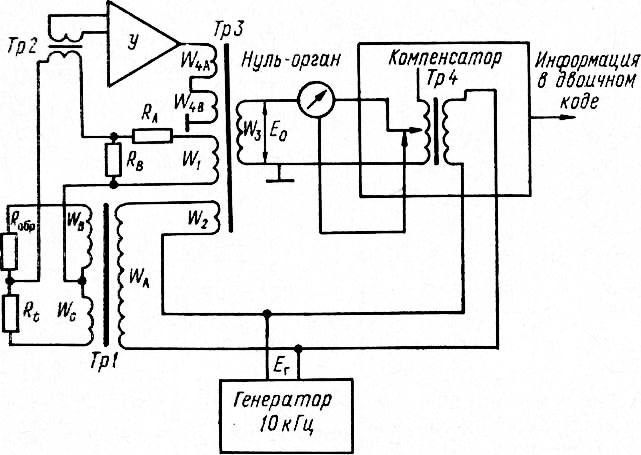
Рис. 1. Схема измерения температуры неуравновешенным мостом.
Информативным параметром рассмотренных термометров сопротивления является электрическое сопротивление.
Наилучшими схемами для измерения сопротивления являются мостовые и потенциометрические. Мостовые схемы могут быть уравновешенными и неуравновешенными. В мостовых уравновешенных схемах выходным параметром является сопротивление, проводимость или отношение сопротивлений плеч моста. В мостовых неуравновешенных схемах выходным параметром является коэффициент передачи или напряжение рассогласования мостовой схемы.

Рис. 2. Потенциометрическая схема измерения сопротивления.
Потенциометрические схемы измерения сопротивления нашли широкое применение в лабораторных приборах, использующихся для поверки и градуировки. В них полностью компенсируется сопротивление подводящих проводов.
В последнее время были созданы модификации потенциомет-рических схем измерения сопротивления, которые были использованы в зондах. На рис. 6 показана такая схема потенциомет-рического преобразователя. Точность измерения температуры зависит от стабильности тока, коэффициентов передачи и усиления. Погрешность измерения температуры не превышает ±0,01 °С. Для преобразования измеренной чувствительным элементом температуры в частоту в последнее время стали применяться управляемые генераторы. Управляемые генераторы с фазовым сдвигом позволяют повысить динамический диапазон изменения частоты. Такие схемы позволяют достичь 100%-ного изменения выходной частоты при 10—15%-ном изменении сопротивления термометра.
При дистанционном методе измерения температуры воды используются инфракрасные радиометры. Они устанавливаются для проведения длительных измерений температуры поверхности воды на искусственных спутниках Земли или на самолетах.
Проведенные в США исследования инфракрасного радиометра, установленного на искусственном спутнике Земли, показали, что этим прибором можно измерять температуру поверхности океана с точностью 1 °С. Измерения проводились в трех спектральных областях: 0,2—0,4; 6,4—6,9; 10—11 мкм. Полученные данные сравнивались с результатами измерения температуры с судов в том же районе. Расхождения были получены в районах, где наблюдались большие флюктуации температуры поверхностных вод. Это район течения Гольфстрим. Исследовалось влияние на точность измерения состояния атмосферы — облачности. Изучалось изменение коэффициента поглощения инфракрасного излучения из-за наличия озона и водяного пара в атмосфере. Пределы точности измерения температуры поверхности океана инфракрасным радиометром исследовались при безоблачной атмосфере со спутника. Одноканальный радиометр показал точность измерения температуры в спектральных участках 900—1000 и 1100—1200 см-1 не выше 2—3°С. В спектральной полосе 2550— 2800 см-1 точность измерений увеличилась до 1,0—1,5 °С. Предел точности измерений определяется наличием слоя кристаллов льда вблизи тропопаузы, который поглощает инфракрасное излучение.
Как показали исследования, двухканальный радиометр, работающий в двух участках спектра, компенсирует влияние на измерение температуры водяного пара. Это исключает необходимость измерения профилей температуры и содержания пара в атмосфере. Точность измерения все же несколько i ограничивается влиянием кристаллов льда в атмосфере.
Для уменьшения погрешности измерения температуры воды до 0,6 °С (в безоблачной атмосфере) необходимо использовать радиометр с четырьмя каналами. В этом случае обеспечивается коррекция на поглощение инфракрасного излучения слоем кристаллов льда.
Более высокая точность измерения температуры поверхности океана может быть достигнута при измерениях инфракрасными радиометрами с самолетов с небольших высот. Так, при измерениях двухканальным радиометром суммарная погрешность измерения за счет поглощения в атмосфере и инструментальной погрешности составила 0,4—0,5 °С.
Как показывают исследования, дистанционный метод измерения температуры поверхности океана имеет большую перспективу при проведении глобальных гидрологических исследований.
Как отмечалось ранее, измерение температуры воды в океане можно выполнять в трех режимах: автономном, зондирующем и буксируемом.
Автономные приборы для измерения температуры воды можно Разделить по характеру преобразования и регистрации данных. Ранее применявшемся фототермографе используется фотоспособ регистрации результатов измерений температуры. Структурная схема прибора приведена на рис. 3. Датчиком температуры Является ртутный термометр, показания которого периодически фотографируются на фотопленку. Управление работой фототермографа происходит по программе, заданной программным устройством— часовым механизмом с механическим или электрическим приводом. На негативе фиксируются шкала термометра и показания ртутного столбика. Для повышения точности измерения устанавливается несколько термометров со сдвинутыми шкалами. Информационная емкость фототермографа обычно составляет 1—3 тысячи измерений.
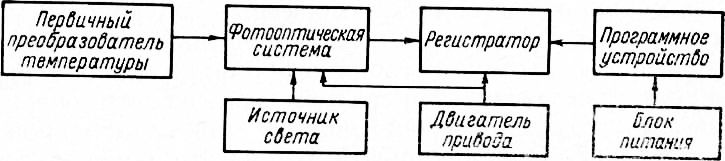
Рис. 3. Структурная схема фототермографа.

Рис. 4. Структурная схема цифрового измерителя температуры.

Рис. 5. Структурная схема термографа с магнитной записью.
Получили распространение цифровые измерители температуры. Структурная схема такого прибора приведена на рис. 8. В качестве датчика обычно используется термометр сопротивления, который включается в схему измерительного моста. Напряжение с выхода моста подается на преобразователь аналог-код. Иногда уравновешивание мостовой измерительной схемы производится непосредственно преобразователем аналог-код методом поразрядного взвешивания. Цифровой последовательный код регистрируется на магнитную. пленку. Управление измерителем и регистрацией производится часовым программным устройством.
Имеют применение термографы, в которых запись производится на магнитную пленку в виде частотного модулированного сигнала. Структурная схема такого прибора приведена на рис. 5. Датчик температуры включается в цепь измерительного генератора, с выхода которого частотно-модулированный сигнал подается на магнитный регистратор. На пленку одновременно пишется опорный сигнал, который позволяет учесть влияние неравномерности протяжки пленки при циклах регистрации. Управление работой прибора осуществляется от программного устройства.
Для весьма точных измерений температуры используются термографы, где датчиком температуры является кварцевый разона-тор. Структурная схема такого прибора приведена на рис. 6.
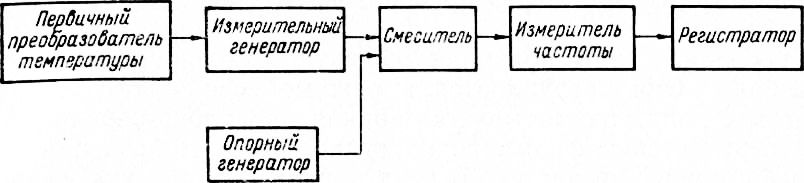
Рис. 6. Структурная схема термографа с кварцевым датчиком.
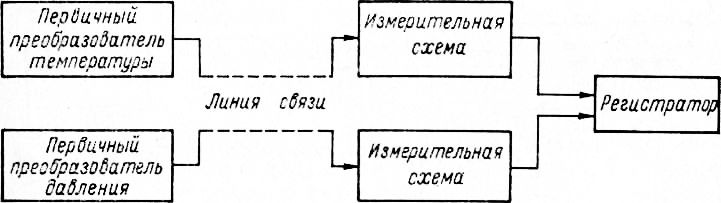
Рис. 7. Структурная схема термобатизонда.
Датчик температуры включен в цепь измерительного генератора, частота которого определяется температурой кварца. Поскольку собственная частота кварцевого резонатора выбирается в пределах 5—30 МГц, а измерение и передача такой высокой частоты связаны с рядом технических сложностей, то для уменьшения рабочей частоты сигнал с измерительного генератора смешивается с сигналом от опорного генератора с высокостабильной частотой. С выхода смесителя снимается напряжение с разностной частотой порядка десятков килогерц. Регистрация измерений температуры производится как в аналоговой, так и в цифровой форме.
Зондирующие приборы используются для измерения вертикального распределения температуры воды. По способу связи с обеспечивающим судном они могут быть разделены на три группы: с кабельной линией связи, с автономной регистрацией данных и с гидроакустическим каналом связи.
Широкое распространение имеют зондирующие приборы с кабельным каналом связи. Они обеспечивают достаточно высокую точность измерений и большую глубину зондирования. В качестве линии связи используются одножильные и многожильные кабель-тросы. Информация, поступающая на борт судна, как правило, оперативно обрабатывается судовой ЭВМ. На рис. 7 показана структурная схема термобатизонда с кабельной линией связи. В погружаемой части размещены лишь датчики температуры и давления резистивного типа. В качестве датчика давления используются мембранные, геликсные или иные чувствительные элементы с потенциометрическим выходом. Измерительная схема находится на борту судна и с зондом связана многожильным кабелем. В качестве измерительных схем в зондах используются уравновешенные мосты постоянного тока. Напряжение с выхода моста подается на двухкоординатный потенциометр-регистратор или через преобразователь аналог — код на вход ЭВМ.
В последние годы получили большую популярность теряемые термозонды. Они погружаются в режиме свободного падения, при этом с зонда разматывается тонкая проволока-кабель, по которой передается информация на судно. Когда кабель полностью размотан, зонд обрывается. В этих зондах нет датчика давления и глубина определяется по времени погружения. Структурная схема теряемого термозонда приведена на рис. 8.

Рис. 8. Структурная схема теряемого термозонда.
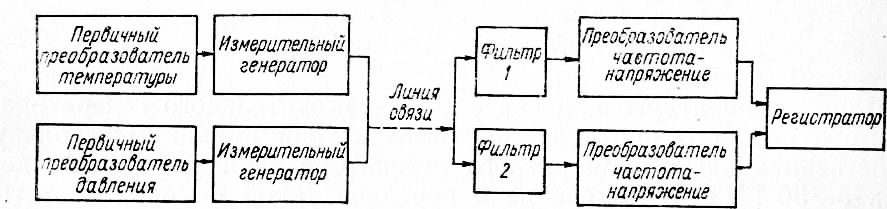
Рис. 9. Структурная схема кабельного термозонда.
В более современных конструкциях зондов применяются кодовые или частотно-модулированные системы передачи данных. Они отличаются высокой помехоустойчивостью передачи информации и позволяют использовать одножильные кабель-тросы.
Датчики температуры и глубины включены в схемы измерительных генераторов. Частотно-модулированные сигналы с выходов генераторов через кабельную линию поступают в судовой измерительный комплекс. Полосовые фильтры разделяют сигналы температуры и глубины, после чего они поступают на преобразователи частота—напряжение и далее на двухкоординатный потенциометр-регистратор или записываются на магнитную ленту или ленту перфоратора.
Для измерения температуры на очень больших глубинах целесообразно применять зонды с автономной регистрацией. Такой способ регистрации исключает использование кабель-тросов и специальных глубоководных вьюшек. Структура такого зонда аналогична рассмотренным выше. Отличие состоит в отсутствии линии связи и наличии программных устройств и блоков питания.
Буксируемые приборы применяются для измерения пространственного распределения температуры воды в поверхностном и приповерхностном слоях на ходу судна. Простейшим из буксируемых приборов является термометр сопротивления, буксируемый за судном на кабель-тросе в поверхностном слое воды.
Для исследования пространственного распределения температуры воды в слое толщиной несколько сот метров используются буксируемые гондолы и буксируемые термокосы с сосредоточенными и распределенными датчиками температуры. Буксируемые гондолы и термокосы имеют возможность перемещения по вертикали за счет управления рулями заглубляющих устройств.
Буксируемые гондолы представляют собой герметичный аппаратурный контейнер, связанный кабель-тросом с судном-носителем. Контейнер имеет специальные заглубители, которые позволяют удерживать его на заданном горизонте. Помимо датчика температуры, часто устанавливается датчик электропроводимости и другие. Данные измерений обычно передаются по кабелю на борт судна, где регистрируются и обрабатываются. Иногда регистрация данных производится в аппаратурном контейнере.
Информация от датчиков температуры и давления после преобразования в частоту поступает по кабелю на судно. Первичный преобразователь температуры включен в плечо прецизионного моста, который питается стабилизированным напряжением и находится в термостате. В другое плечо моста, помимо магазина сопротивлений, включен компенсатор, представляющий собой отрезок кабель-троса КТБ-6. В диагональ моста включен самопишущий потенциометр КСП-4, регистрирующий интегральную температуру.
Частотный сигнал датчика давления и глубинной температуры подается через фильтр низкой частоты на частотомер, с выхода которого он в виде параллельного двоично-десятичного кода поступает на преобразователь код — аналог и далее на самописец КСП-4.
Термокоса для измерения интегральной температуры характеризуется следующей чувствительностью датчиков: интегральной температуры 0,02 °С, температуры поверхностных вод 0,005 °С, температуры глубинных вод 0,005 °С.